Изобретение относится к текстильному машиностроению, а именно к устройствам для взаимосвязанного управления движением рабочих органов ленточных машин, оснащенных авторегулятором неровноты выходного продукта.
Наиболее близким к изобретению является устройство управления ленточными машинами, содержащее блок электрического питания, главный электрический привод, вытяжной прибор, механические передачи и электромеханический авторегулятор неровноты продукта.
Преимуществами такого устройства являются повышение надежности работы за счет упрощения кинематики и использования раздельного привода рабочих органов, а также увеличение производительности.
Однако в моменты пуска и останова таких устройств в них возможно кратковременное невзаимосвязанное движение рабочих органов. Обусловлено это тем, что в момент пуска и к моменту останова машины регулирующий привод не может иметь достаточные по величине управляющие воздействия, корректирующие взаимное положение рабочих органов. Несмотря на то, что такое состояние длится десятые доли секунды, часто это оказывается (при больших скоростях перемещения продукта) достаточным либо для обрыва продукта, либо для образования пересечек. Вследствие
xj
со о го
СО
оо
этого ухудшается качество продукта, увеличивается длительность простоев и количество заправок машины, что в конечном итоге вызывает снижение производительности труда на высокоскоростных машинах.
Цель изобретения - повышение производительности и качества ленты.
Цель достигается тем, что устройство управления ленточной машиной, содержащее блок электрического питания, главный и регулируемый приводы, вытяжной прибор, датчик линейной плотности ленты на входе в вытяжной прибор, датчики скорости ленты на входе и выходе вытяжного прибора, блоки пуска и останова главного привода, блок памяти и механические передачи, дополнительно снабжено электромагнитной муфтой сцепления, тремя электрическими коммутаторами, каждый из которых имеет вход управления и коммутирующую цепь, программным блоком, имеющим два входа и три выхода, электромагнитная муфта сцепления включена последовательно в механическую передачу между главным и регулируемым приводами, первый выход программного блока подключен к входу коммутатора, коммутирующая цепь которого включена между выходом блока памяти и общей точкой схемы, выход программного блока подключен к входу коммутатора, коммутирующая цепь которого включена в цепь питания регулируемого привода, выход программного блока подключен к входу коммутатора, коммутирующая цепь которого включена в цепь питания обмотки муфты сцепления, вход программного блока подключен к выходу блока пуска, а второй вход логического блока подключен к выходу блока останова главного привода.
Программный блок содержит элементы задержки, логические элементы ИСКЛЮЧАЮЩЕЕ ИЛИ, имеющие каждый по два входа, логический элемент НЕ, причем выход одного элемента задержки подключен к входам логических элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, выход другого элемента задержки подключен к другим входам тех же элементов ИСКЛЮЧАЮЩЕЕ ИЛИ.
Вход одного из логических элементов ИСКЛЮЧАЮЩЕЕ ИЛИ подключен к выходу блока останова, выход другого логического элемента ИСКЛЮЧАЮЩЕЕ ИЛИ через логический элемент НЕ подключен к входу коммутатора, выходы других логических элементов ИСКЛЮЧАЮЩЕЕ ИЛИ подключены к входам двух других коммутаторов.
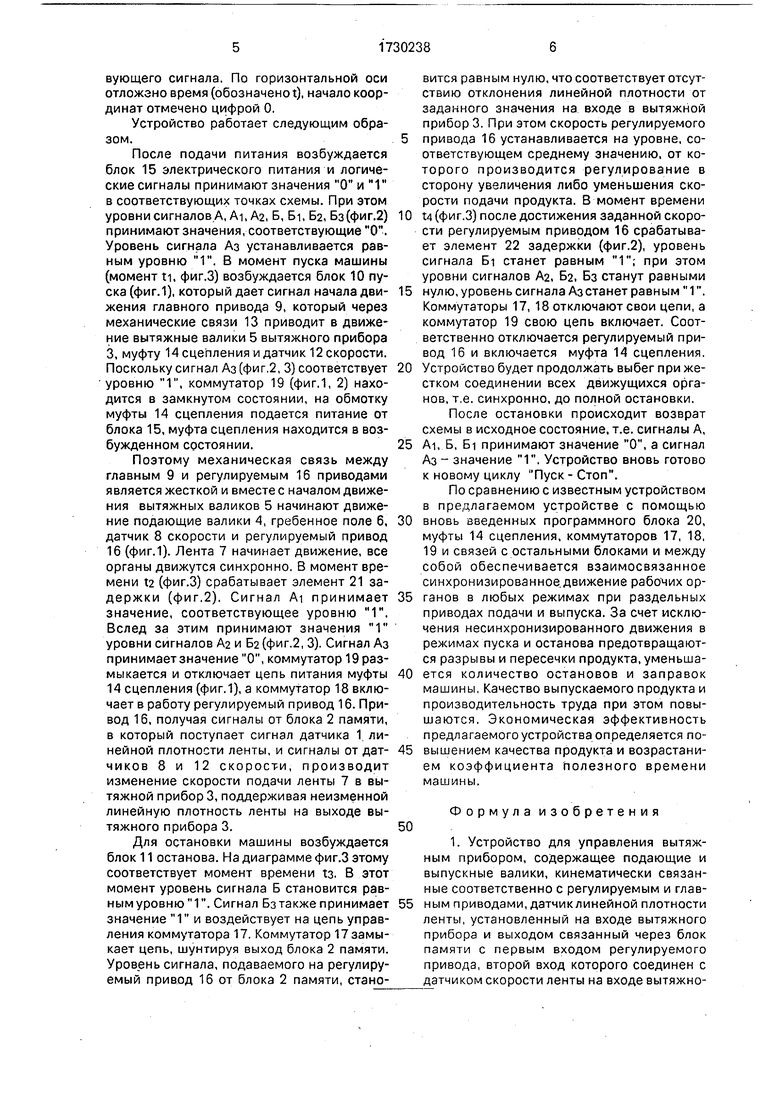
На фиг.1 изображена блок-схема устройства; на фиг.2 - блок-схема программного блока; на фиг.З - диаграммы сигналов, поясняющие принцип действия устройства.
На фиг.1 обозначены датчик 1 линейной плотности ленты на входе в вытяжной прибор; блок 2 памяти, который необходим в схеме регулирования для компенсации транспортного запаздывания, вытяжной прибор 3, в состав которого входят подающие 4 и выпускные 5 валики и гребенное поле 6, волокнистую ленту 7, датчики 8, 12 скорости ленты соответственно на входе и
0 выходе вытяжного прибора, главный привод 9, блоки 10,11 пуска и останова главного привода соответственно, механические связи 13, электромагнитную муфту 14 сцепления; блок 15 электрического питания,
5 регулируемый привод 16, изменяющий скорость подачи ленты 7 в зависимости от сигнала блока 2 памяти, коммутаторы 17,18,19, программный блок 20, имеющий два входа, подключенных к выходам блоков пуска и
0 останова, и три выхода, подключенных к соответствующим входам коммутаторов.
На фиг.2 показано устройство программного блока 20 и его связи с другими блоками. На фиг.2 обозначены элементы 21, 22
5 задержки, входы которых подключены к выходам соответственно блока 10 пуска и блока 11 останова. Выходом элементов 21, 22 задержки является состояние переключающих контактов, причем исходному положе0 нию контактов соответствует уровень О логического сигнала, подаваемого в цепи логики, а при срабатывании элементов задержки в цепи логики подается уровень 1. Кроме того, на фиг.2 обозначены логиче5 ские элементы ИСКЛЮЧАЮЩЕЕ ИЛИ 23, 24, 25, имеющие по два входа и одному выходу, логический элемент НЕ 26. В блоках 10, 11 показаны контакты, характеризующие состояние этих блоков: невозбужден0 ное состояние - уровень сигналов на контактах - О, возбужденное состояние - уровень сигналов, выдаваемых в блок 20, соответствует уровню 1. На фиг.2 показано, что на входы коммутаторов 17, 18, 19
5 воздействуют сигналы выходов логических элементов Бз, Б2, Аз.
На фиг.З изображены диаграммы сигналов при работе устройства. Обозначения сигналов на диаграммах соответствуют
0 обозначениям входов и выходов блоков на фиг.2: А, Б - входы программного блока 20 (выходы блоков пуска и останова); AI, Бт - выходы элементов задержки; А2, Б., Бз - выходы элементов ИСКЛЮЧАЮЩЕЕ ИЛИ;
5 Аз - выход элемента НЕ.
Выходы Аз, Б2, Бз являются выходами программного блока 20. Уровни гигналов на диаграммах фиг.З могут принимать два состояния: О либо 1, причем уровню О соответствует нулевая ордината соответствующего сигнала. По горизонтальной оси отложено время (обозначено t), начало координат отмечено цифрой 0.
Устройство работает следующим образом.
После подачи питания возбуждается блок 15 электрического питания и логические сигналы принимают значения О и 1 в соответствующих точках схемы. При этом уровни сигналов A, Ai, A2, Б, 5i, 62, Бз(фиг.2) принимают значения, соответствующие О. Уровень сигнала Аз устанавливается равным уровню 1. В момент пуска машины (момент ti. фиг.З) возбуждается блок 10 пуска (фиг.1), который дает сигнал начала движения главного привода 9, который через механические связи 13 приводит в движение вытяжные валики 5 вытяжного прибора 3, муфту 14 сцепления и датчик 12 скорости. Поскольку сигнал Аз (фиг.2, 3) соответствует уровню 1, коммутатор 19 (фиг.1, 2) находится в замкнутом состоянии, на обмотку муфты 14 сцепления подается питание от блока 15, муфта сцепления находится в возбужденном состоянии.
Поэтому механическая связь между главным 9 и регулируемым 16 приводами является жесткой и вместе с началом движения вытяжных валиков 5 начинают движение подающие валики 4, гребенное поле 6, датчик 8 скорости и регулируемый привод 16 (фиг.1). Лента 7 начинает движение, все органы движутся синхронно. В момент времени t2 (фиг.З) срабатывает элемент 21 задержки (фиг.2). Сигнал AI принимает значение, соответствующее уровню 1й. Вслед за этим принимают значения 1 уровни сигналов А2 и Б2 (фиг.2, 3). Сигнал Аз принимаетзначение О, коммутатор 19 размыкается и отключает цепь питания муфты 14 сцепления (фиг.1), а коммутатор 18 включает в работу регулируемый привод 16. Привод 16, получая сигналы от блока 2 памяти, в который поступает сигнал датчика 1 линейной плотности ленты, и сигналы от датчиков 8 и 12 скорости, производит изменение скорости подачи ленты 7 в вытяжной прибор 3, поддерживая неизменной линейную плотность ленты на выходе вытяжного прибора 3.
Для остановки машины возбуждается блок 11 останова. На диаграмме фиг.З этому соответствует момент времени гз. В этот момент уровень сигнала Б становится равным уровню 1. Сигнал Бз также принимает значение 1 и воздействует на цепь управления коммутатора 17. Коммутатор замыкает цепь, шунтируя выход блока 2 памяти. Уровень сигнала, подаваемого на регулируемый привод 16 от блока 2 памяти, становится равным нулю, что соответствует отсутствию отклонения линейной плотности от заданного значения на входе в вытяжной прибор 3. При этом скорость регулируемого
привода 16 устанавливается на уровне, соответствующем среднему значению, от которого производится регулирование в сторону увеличения либо уменьшения скорости подачи продукта. В момент времени
t4 (фиг.З) после достижения заданной скорости регулируемым приводом 16 срабатывает элемент 22 задержки (фиг.2), уровень сигнала Бч станет равным при этом уровни сигналов А2, Б2, Бз станут равными
нулю, уровень сигнала Азстанет равным 1. Коммутаторы 17, 18 отключают свои цепи, а коммутатор 19 свою цепь включает. Соответственно отключается регулируемый привод 16 и включается муфта 14 сцепления.
Устройство будет продолжать выбег при жестком соединении всех движущихся органов, т.е. синхронно, до полной остановки.
После остановки происходит возврат схемы в исходное состояние, т.е. сигналы А,
AI, Б, БТ принимают значение О, а сигнал Аз - значение 1. Устройство вновь готово к новому циклу Пуск-Стоп.
По сравнению с известным устройством в предлагаемом устройстве с помощью
вновь введенных программного блока 20, муфты 14 сцепления, коммутаторов 17, 18, 19 и связей с остальными блоками и между собой обеспечивается взаимосвязанное синхронизированное движение рабочих органов в любых режимах при раздельных приводах подачи и выпуска. За счет исключения несинхронизированного движения в режимах пуска и останова предотвращаются разрывы и пересечки продукта, уменьшается количество остановов и заправок машины, Качество выпускаемого продукта и производительность труда при этом повышаются. Экономическая эффективность предлагаемого устройства определяется повышением качества продукта и возрастанием коэффициента полезного времени машины.
50
Формула изобретения
1. Устройство для управления вытяжным прибором, содержащее подающие и выпускные валики, кинематически связанные соответственно с регулируемым и глав- 5 ным приводами, датчик линейной плотности ленты, установленный на входе вытяжного прибора и выходом связанный через блок памяти с первым входом регулируемого привода, второй вход которого соединен с датчиком скорости ленты на входе вытяжного прибора, датчик скорости ленты на выходе вытяжного прибора, блоки пуска и останова главного привода, и источник питания, отличающееся тем, что, с целью повышения производительности и качества ленты, оно имеет электромагнитную муфту сцепления, кинематически связанную с подающими и выпускными валиками, программный блок и коммутаторы, причем первым и вторым входами программный блок соединен с выходами блоков пуска и останова главного привода, первый выход связан через первый коммутатор с обмоткой электромагнитной муфты, второй выход через второй коммутатор - с третьим вхо- дом регулируемого привода, а третий выход - с управляющим входом третьего коммутатора, вход которого связан с выходом запоминающего устройства, а выход - с общей шиной источника питания, при этом четвер- тый вход регулируемого привода соединен
/
Z
It t i ,J.. /
СЗ
L L-t
X
с датчиком скорости ленты на выходе вытяжного прибора.
2, Устройство поп.1,отличающее- с я тем, что блок содержит элементы задержки и логические элементы НЕ и ИСКЛЮЧАЮЩЕЕ ИЛИ, при этом вход первого элемента задержки является первым входом программного блока, а выход связан с первыми входами первого и второго элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, вход второго элемента задержки и первый вход третьего элемента ИСКЛЮЧАЮЩЕЕ ИЛИ объединены и являются вторым входом программного блока, а выход второго элемента задержки связан с объединенными вторыми входами элементов ИСКЛЮЧАЮЩЕЕ ИЛИ, при этом выход первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ соединен с входом элемента НЕ, выход которого, а также выходы второго и третьего элементов ИСКЛЮЧАЮЩЕЕ ИЛИ являются выходами программного блока.
7

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| Регулятор линейной плотности ленты | 1981 |
|
SU981471A1 |
| Устройство для регулирования линейной плотности ленты ленточной машины | 1987 |
|
SU1557207A1 |
| Устройство для управления крутильно-мотальным механизмом ровничной машины | 1979 |
|
SU781229A1 |
| Отказоустойчивая система управления газоперекачивающим агрегатом | 1988 |
|
SU1629580A1 |
| Устройство для управления крутильномотальным механизмом | 1976 |
|
SU565956A1 |
| Устройство для регулирования линейной плотности волокнистого продукта | 1990 |
|
SU1791480A1 |
| Аппарат магнитной записи | 1983 |
|
SU1081662A1 |
| Устройство автоматической защиты процесса нитрования | 1988 |
|
SU1685500A1 |
| Устройство для регулирования линейной плотности волокнистого продукта | 1988 |
|
SU1618793A1 |

Изобретение относится к текстильному машиностроению и может быть использовано на ленточных машинах, оснащенных электромеханическим авторегулятором не- ровноты ленты при раздельных приводах подачи и выпуска нити. Целью изобретения является повышение производительности и качества выпускаемой ленты. Устройство содержит главный и регулируемый приводы, датчик неровноты ленты на входе в вытяжной прибор, подающие и выпускные валики, перемещающие ленту относительно гребенного поля, блок памяти, получающий информацию от датчика неровноты ленты, блоки пуска и останова, датчики скорости движения ленты на входе в вытяжной прибор и на выходе из него, электромагнитную муфту, коммутаторы и программный блок. Устройство ликвидирует возможность обрыва или пересечек продукта в момент начала и окончания движения рабочих органов путем исключения несинхронного хода основного и регулируемого приводов. За счет этого сокращено время простоя, повышается производительность труда и качество выпускаемого продукта. 1 з.п. ф-лы, 3 ил. со С
Фиг /
Гиг. 2,
| СПОСОБ ПОЛУЧЕНИЯ ПОРОШКОВ ПЕРЕХОДНЫХ МЕТАЛЛОВ | 2002 |
|
RU2234396C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
