Изобретение относится к промы1и.г1ен ному транспорту, а именно к конвейерам для перегрузки штучных грузов. Известны роликовые конвейеры, содержащие основание, раму с грузонесущими роликами, связанную с основанием при помощи упругих элементов 1 . Недостатком таких конвейеров я.вляется то, что .они имеют огра.нйченные функциональные возможности, поскольку не могут быть испбльзованы для подачи грузов различных типоразмеров из-за невозможности регулировки в широком диапазоне высоты кон вейера для совмещения плоскости стол технологической машины с опорной поверхностью грузонесущих роликов конвейера. . Известны также конвейеры для перегрузки штучных грузов, содержащие основание, раму с рабочим органом, смонтированную на основании посредством по крайней мере двух шарнирных опор, одна из которых выполнена пятизвенной, соединенных между собой ходовым винтом, связанным с приводом 2.В таких конвейерах ходовой винт., выполнен телескопическим с муфтой сцепления, а его привод - в виде смонтированных на концах винта маховичков. Недостаток указанных конвейеров заключается в том, что при установ- .ке конвейера на необходимую высоту для совмещения опорной поверхности рабочего органа с плоскостью стола технологической машины вследствие выполнения одной из опор рамы четырехзвенной, а вторая - пятизвенной для получения плоскопараллельного .перемещения рамы необходимо вручную произвести расцепление муфты с телескопическим ходовнм винтом, а затем при помощи маховиков вручную произвести индивидуальную регулировку каждой шарнирной опоры, после чего осуществить сцепление телескопического ходового винта муфтой. Все это приводит к непроизводительным затратам времени на совмещение опорной поверхности рабочего органа конвейера с плоскостью стола технологической машины, участию в регулировке, нескольких операторов, что в целом значительно снижает удоб ство эксплуатации конвейера.
Целью изобретения является повышение удобства эксплуатации конвейера .
Это достигается тем, что конвейер снабжен шарнирно соединенными между собой посредством оси рычагами, один из которых соединен шарнирно с валом привода ходового винта, а другойКнепосредственно с ходовым винтом, и расположенными в двух параллельных плоскостях цепными передачами, связывающими ходовой винт с приводом, причем ведомая звездочка одной передачи и ведущая звездочка другой установлены на оси шарнирного соединения рычагов, а вторая опора. выполнена пятизвенной.
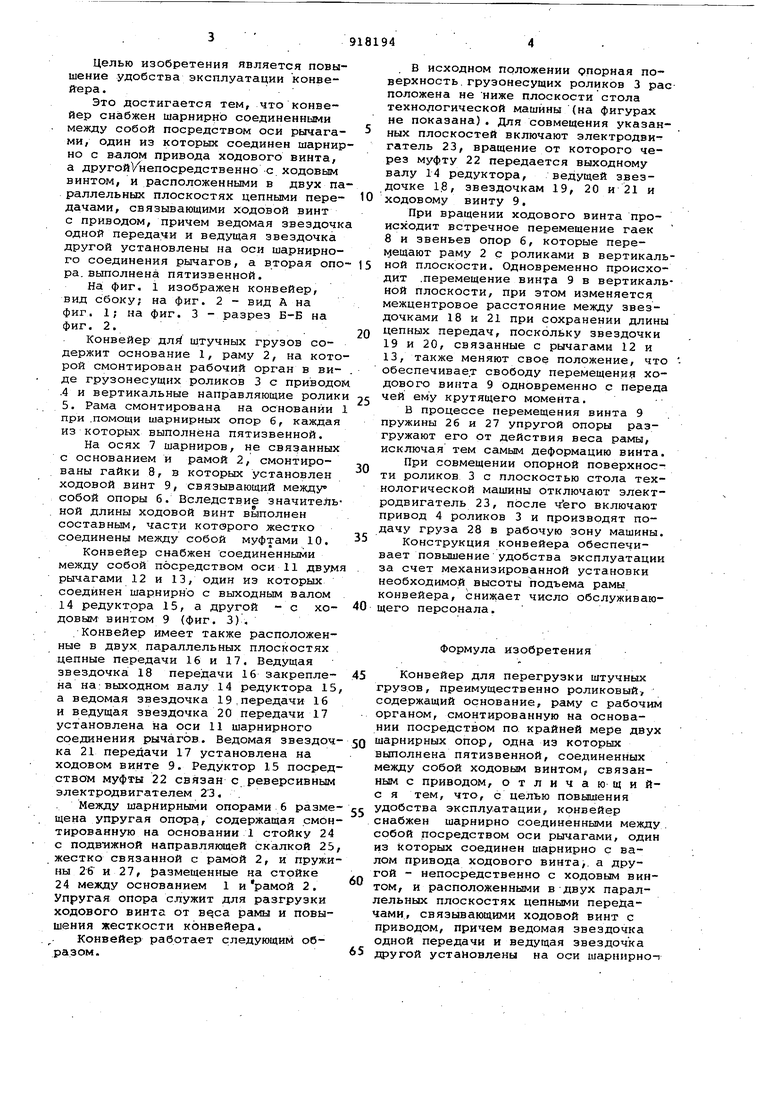
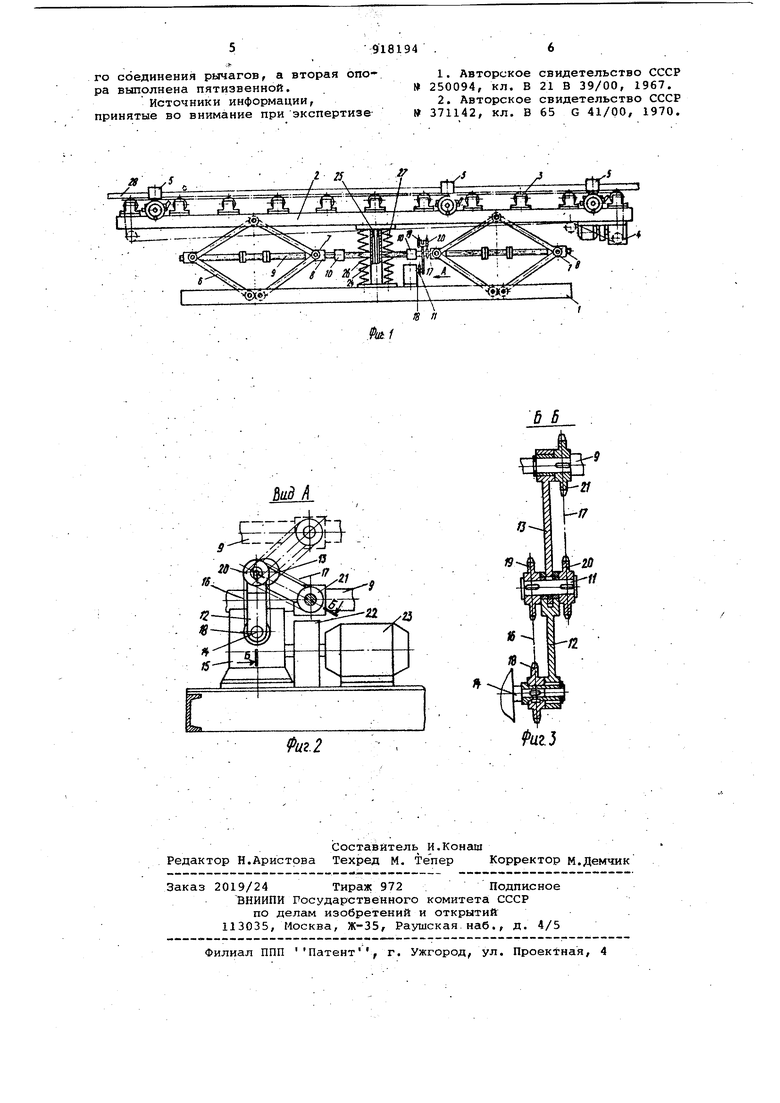
На фиг, 1 изображен конвейер, вид сбоку; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.. .
Конвейер дли штучных грузов содержит основание 1, раму 2, на которой смонтирован рабочий орган в виде грузонесущих роликов 3 с приводом .4 и вертикальные направляющие ролики 5. Рама смонтирована на основании 1 при .помощи шарнирных опор б, каждая из которых выполнена пятизвенной.
На осях 7 шарниров, не связанных с основанием и рамой 2, смонтированы гайки 8, в которых установлен ходовой винт 9, связывающий между собой опоры 6. Вследствие значительной длины ходовой винт выполнен составным, части которого жестко соединены между собой муфтами 10.
Конвейер снабжен соединенными между собой посредством оси 11 двумя рычагами 12 и 13, один из которых соединен шарнирно с выходным валом 14 редуктора 15, а другой - с ходовым винтом 9 {фиг. 3),
Конвейер имеет также расположенные в двух параллельных плоскостях цепные передачи 16 и 17. Ведущая звездочка 18 передачи 16 закреплена на выходном валу 14 редуктора 15, а ведомая звездочка 19,передачи 16 и ведущая звездочка 20 передачи 17 установлена на оси 11 шарнирного соединения рычагов. Ведомая звездочка 21 передачи 17 установлена на ходовом винте 9. Редуктор 15 посредством муфты 22 связан с реверсивным электродвигателем 23. .
Между шарнирными опорами 6 размещена упругая опора, содержащая смонтированную на основании 1 стойку 24 с подв-ижной направляющей скалкой 25, жестко связанной с рамой 2, и пружины 26 и 27, размещенные на стойке 24 между основанием 1 ирамой 2. Упругая опора служит для разгрузки ходового винта от рамы и повышения жесткости конвейера.
Конвейер работает следующим образом.
В исходном положении опорная поверхность, грузонесущих роликов 3 рас положена не ниже плоскости стола технологической машины (на фигурах не показана). для совмещения указанных плоскостей включают электродвигатель 23, вращение от которого через муфту 22 передается выходному валу 14 редуктора, ведущей звездочке 1.8, звездочкам 19, 20 и 21 и ходовому винту 9.
При вращении ходового винта происходит встречное перемещение гаек 8 и звеньев опор 6, которые перемещают раму 2 с роликами в вертикальной плоскости. Одновременно происходит .перемещение винта 9 в вертикальной плоскости, при этом изменяется межцентровое расстояние между звездочками 18 и 21 при сохранении длины цепных передач, поскольку звездочки 19 и 20, связанные с рычагами 12 и 13, также меняют свое положение, что обеспечивает свободу перемещения ходового винта 9 одновременно с переда чей ему крутящего момента.
В процессе перемещения винта 9 пружины 26 и 27 упругой опоры разгружают его от действия веса рамы, исключая тем самым деформацию винта.
При совмещении опорной поверхности роликов 3 с плоскостью стола технологической машины отключают электродвигатель 23, после чЬго включают привод 4 роликов 3 и производят подачу груза 28 в рабочую зону машины.
Конструкция конвейера обеспечивает повышение удобства эксплуатации за счет механизированной установки необходимой высоты подъема рамы конвейера, снижает число обслуживающего персонала.
Формула изобретения
Конвейер для перегрузки штучных грузов, преимущественно роликовый, содержащий основание, раму с рабочим органом, смонтированную на основании посредством по крайней мере двух шарнирных опор, одна из которых выполнена пятизвенной, соединенных между собой ходовым винтом, связанным с приводом, отличающийс я тем, что, с целью повышения удобства эксплуатации, конвейер снабжен шарнирно соединенными между собой посредством оси рычагами, один из которых соединен шарнирно с валом привода ходового винта,, а другой - непосредственно с ходовым винтом/ и расположенными в-двух параллельных плоскостях цепными передачами., связывающими ходовой винт с приводом, причем ведомая звездочка одной передачи и ведущая звездочка другой установлены на оси шарнирного соединения рычагов, а вторая опора вьтрлнена пятизвенной.
Источники информации, принятые во внимание при экспертизе1.Авторское свидетельство СССР ( 250094, кл. В 21 В 39/00, 1967.
2.Авторское свидетельство СССР 371142, кл. В 65 G 41/00, 1970.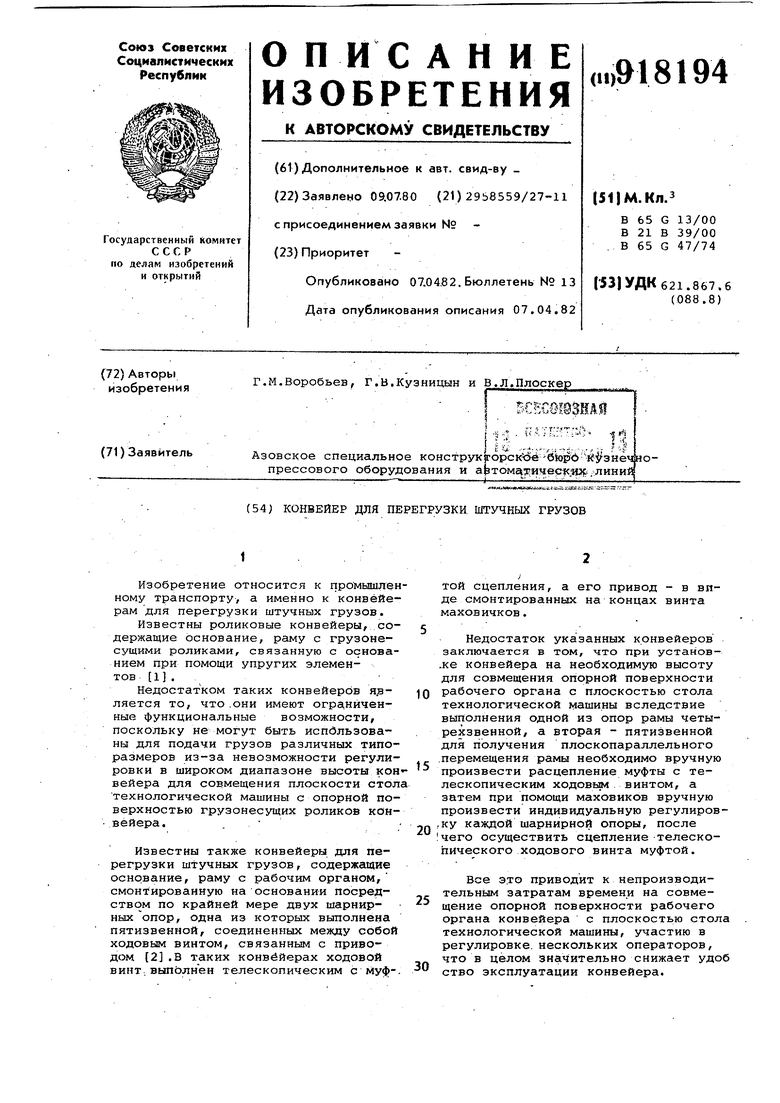
| название | год | авторы | номер документа |
|---|---|---|---|
| Рольганг для перемещения цилиндрических изделий | 1990 |
|
SU1720948A1 |
| МАШИНА ДЛЯ ПОГРУЗКИ ШТУЧНЫХ ГРУЗОВ В ВАГОНЫ | 1969 |
|
SU238400A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Телескопический конвейер | 1985 |
|
SU1276580A1 |
| Ленточный конвейер | 1983 |
|
SU1077824A1 |
| Устройство для разгрузки вагонов | 1985 |
|
SU1346548A1 |
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Конвейерная система для стабилизации ритма подачи тарно - штучных грузов | 1990 |
|
SU1789456A1 |
| Тормозное устройство гравитационного конвейера | 1989 |
|
SU1742170A1 |
| Пульсирующий конвейер с регулируемым шагом | 1981 |
|
SU988691A1 |
иг.2
