Изобретение относится к области контроля индукционных датчиков вибрации и предназначено для оценки технического состояния узлов механического сопряжения инерционной массы датчика с его корпусом без разборки прибора, в частности в датчиках измерения вибрации авиадвигателей.
Известен способ контроля индукционных датчиков вибрации, включающий механическое внешнее воздействие заданной частоты на корпус установленного на приспособлении датчика посредством вибростенда, измерение выходных параметров этого процесса на сигнальной обмотке датчика, оценку технического состояния датчика сравнением измеренного значения с заданным.
Данный способ не позволяет производить контроль датчиков без использования вибростендов и выявить зоны опасного износа узлов сопряжений инерционной массы датчика с корпусом прибора,
Наиболее близким по технической сущности к предлагаемому является способ контроля самолетных индукционных датчиков вибрации, заключающийся в воздействии переменным электрическим током на сигнальную обмотку контролируемого датчика вибрации и измерении в этой же цепи составляющей сигнала, вызванной дефектами датчика,
Недостатком известного способа является невозможность измерения основной составляющей пространст 5ОЭ Ю
00
венного вектора вибрации, возникающей в результате износа узлов сопряжений инерционной массы датчика с корпусом прибора, и невозможность определения места механического дефекта датчика,
Целью изобретения является повышение точности и информативности контроля путем увеличения диагностической информации,
Поставленная цель достигается тем, что согласно способу на сигнальную обмотку датчика воздействуют электрическим сигналом с выбранными параметрами напряжения и частоты, измеряют параметры вибрации корпуса прибора, причем измерения осуществляют на заданном фиксированном угле наклона оси чувствительности датчика и фиксированных углах его разворота вокруг этой оси, оценку технического состояния механических узлов датчика производят по полученным значениям параметров вибрации его корпуса.
По шение точности и информативности контроля достигается тем, что всю последовательность операций повторяют по меньшей мере еще на одном фиксированном угле наклона оси чувствительности датчика. Оценку технического состояния механических узлов производят по разностям значений параметров вибраций корпуса датчика, полученных при различных уклонах,
Исходя из принципа обратимости магнитоэлектрических устройств амплитуду перемещения инерционной массы индукционного датчика можно задать, используя формулу для расчета перемещений рабочего стола виброустановок электродинамического типа:
Sm
В- Е- I,
м -со
+
4к2 со
I5- L2
де В - индукция в воздушном зазоре магнитной системы датчика, Тл;
длина провода рабочей обмотки, м; максимально допустимое зна 1ычение тока в обмотке, А; М - инерционная масса, кг; G5Q- угловая частота колебаний инерционной массы, рад/с , и L - сопротивление, Ом, и индуктивность Гн, рабочей обмотки.
0
5
5
0
Следовательно, задавшись значениями тока I и частоты СО , можно Получить требуемое перемещение (инерционной массы датчика относительно его корпуса. Величину требуемого перемещения выбирают из условия перекрытия максимально возможной зоны износа узлов механического сопротивления (оси центрирования инерционной массы, рабочих поверхностей подшипников) и максимально допустимого значения тока в рабочей обмотке датчика (технические условия изготовления) .
Обеспечив требуемое взаимное перемещение, внешним прибором измеряют величину вибрации корпуса датчика по оси, перпендикулярной к его оси чувствительности, С целью стабилизации показаний внешнего измерителя вибрации ось чувствительности датчика наклоняют по меньшей мере на один (заданный) угол наклона. Измерение вибрации корпуса датчика производят после разворота его вокруг оси чувствительности на углы, кратные количеству опор (зон сопряжения) инерционной массы датчика с корпусом. По полученным значениям вибрации производят оценку технического состояния датчика,
При проведении этих операций на другом угле наклона датчика вычисляют приращения сигналов в зависимости от этого угла, Диагностические сигналы сравнивают с заданными - полученными в результате измерений проведенных на датчиках с нулевой наработкой и неисправных.
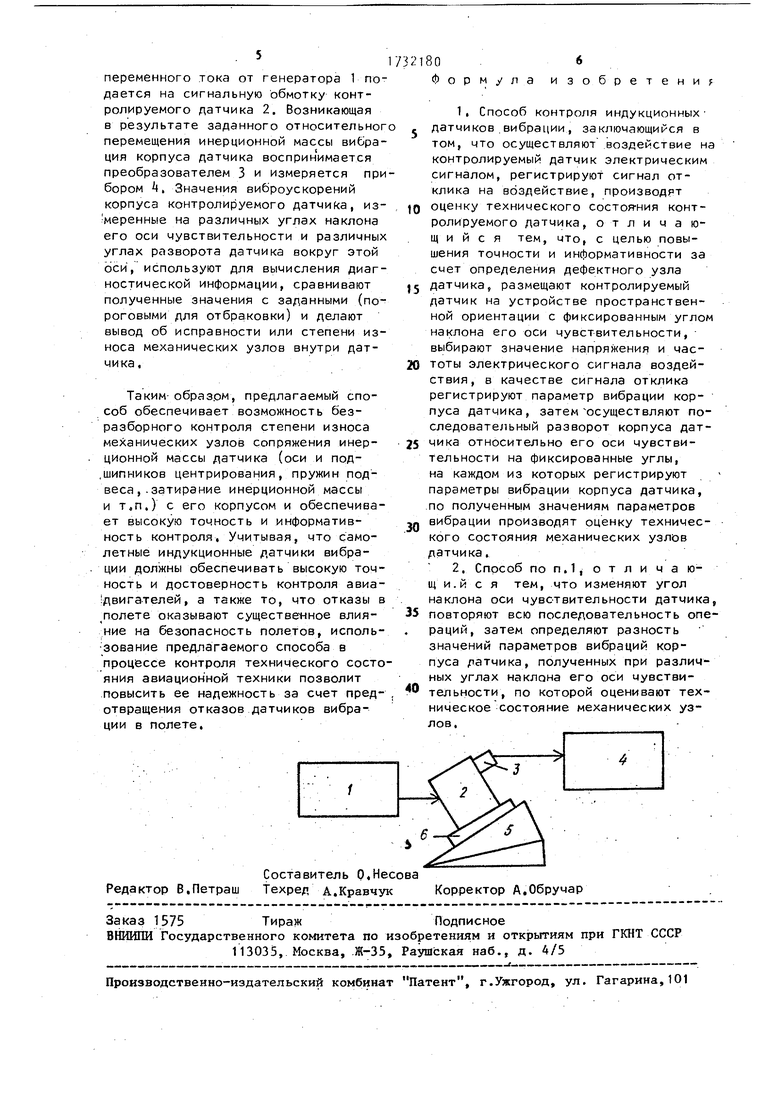
На чертеже представлена структурная схема устройства для реализации предлагаемого способа,
Устройство содержит генератор 1 гармонических колебаний, включенный в цепь сигнальной (рабочей) обмотки датчика 2, пьезоэлектрический преоб- разователь 3 измеритель вибрации, наклонную платформу (с одной или ( несколькими фиксированными плоское- тями наклона) 5, приспособление 6 для разворота корпуса датчика вокруг его вертикальной оси,
Устройство работает следующим 5 образом.
Контролируемый датчик 2 крепится к приспособлению 6, которое уста- навливается на одну из рабочих граней платформы 5, Электрический сигнал
5
0
5
переменного тока от генератора 1 подается на сигнальную обмотку контролируемого датчика 2. Возникающая в результате заданного относительног перемещения инерционной массы вибрация корпуса датчика воспринимается преобразователем 3 и измеряется прибором 4, Значения виброускорений корпуса контролируемого датчика, из- меренные на различных углах наклона его оси чувствительности и различных углах разворота датчика вокруг этой оси, используют для вычисления диагностической информации, сравнивают полученные значения с заданными (пороговыми для отбраковки) и делают вывод об исправности или степени износа механических узлов внутри датчика,
Таким образом, предлагаемый способ обеспечивает возможность безразборного контроля степени износа механических узлов сопряжения инерционной массы датчика (оси и подшипников центрирования, пружин подвеса, затирание инерционной массы и т.п.) с его корпусом и обеспечивает высокую точность и информативность контроля. Учитывая, что самолетные индукционные датчики вибрации должны обеспечивать высокую точность и достоверность контроля авиа- двигателей, а также то, что отказы в олете оказывают существенное влияние на безопасность полетов, использование предлагаемого способа в процессе контроля технического состояния авиационной техники позволит повысить ее надежность за счет пред- отвращения отказов датчиков вибрации в полете.
0
5
0
5
0
5
0
Формула изобретения
1. Способ контроля индукционных датчиков вибрации, заключающийся в том, что осуществляют воздействие на контролируемый датчик электрическим сигналом, регистрируют сигнал отклика на воздействие, производят оценку технического состоя-ния контролируемого датчика, отличающийся тем, что, с целью повышения точности и информативности за счет определения дефектного узла датчика, размещают контролируемый датчик на устройстве пространственной ориентации с фиксированным углом наклона его оси чувствительности, выбирают значение напряжения и частоты электрического сигнала воздействия, в качестве сигнала отклика регистрируют параметр вибрации корпуса датчика, затем осуществляют последовательный разворот корпуса датчика относительно его оси чувствительности на фиксированные углы, на каждом из которых регистрируют параметры вибрации корпуса датчика, по полученным значениям параметров вибрации производят оценку технического состояния механических узлов датчика.
2, Способ поп.1,отличаю- щ и.й с я тем, что изменяют угол наклона оси чувствительности датчика, повторяют всю последовательность операций, затем определяют разность значений параметров вибраций корпуса датчика, полученных при различных углах наклона его оси чувствительности, по которой оценивают техническое состояние механических узлов.
Изобретение относится к области контроля и диагностики индукционных датчиков вибрации и предназначено для определения их технического состояния с выявлением дефектных узлов сопряжения инерционной массы датчика с его корпусом. Цель изобретения - повышение точности и информативности. Способ включает воздействие на контролируемый датчик электрическим сигналом с выбранными параметрами напряжения и частоты, измерение вибрации корпуса датчика акселерометром при наклоне оси его чувствительности, а также при развороте корпуса датчика вокруг этой оси, вычисление диагностических параметров и их сравнение с заданными. 1 з.п. ф-лы, 1 ил.
| Техническое описание и инструкция по эксплуатации на поверочную установку УПИВ-ЗООм, 6 Л 2.763 003 ТО-ЛУ | |||
| ( СПОСОБ КОНТРОЛЯ ИНДУКЦИОННЫХ ДАТЧИКОВ |
