7 П В
Фс/г.г
Изобретение относится к гидроавтоматике и может быть использовано в приводах автоматического управления летательными аппаратами.
Цель изобретения - повышение быстродействия и надежности за счет исключения отказов, связанных с перекосами поршней.
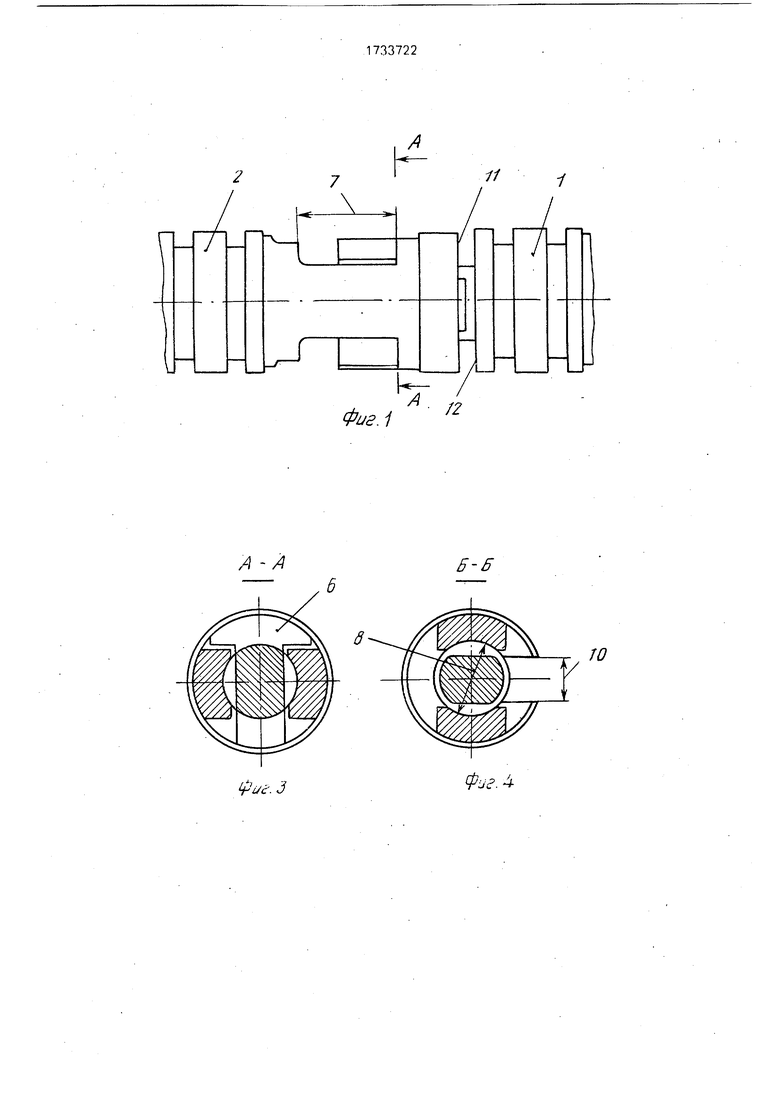
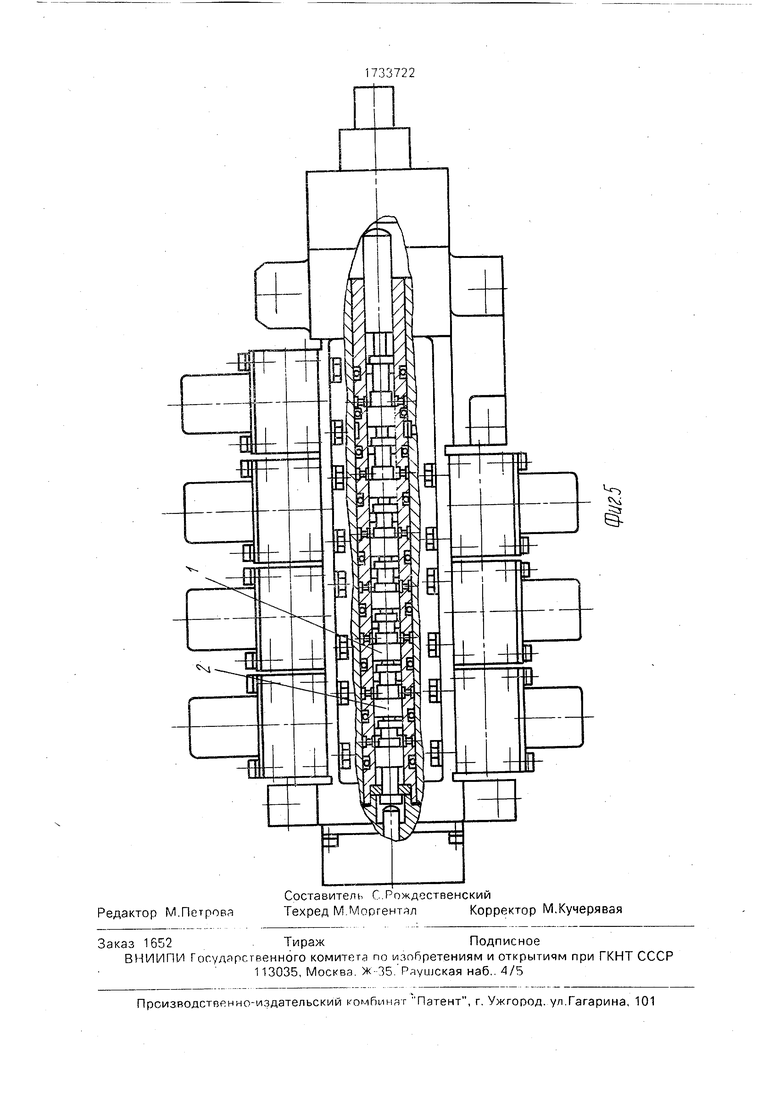
На фиг. 1 изображены два соединенных между собой плавающих поршня; на фиг. 2 - то же. вид сверху; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - суммирующий механизм, общий вид.
Механизм содержит плавающие поршни, например семь поршней (фиг. 5), из которых обозначены поршни 1 и 2 (фиг. 1). размещенные с образованием полостей в гильзе (не обозначена) и с возможностью взаимодействия с позиционируемым золотником (не изображен) С одной стороны каждого поршня 1 (2) элемент зацепления выполнен в виде штока 3 с параллельными лысками 4 и буртом 5. выполненным Т-образным с вершиной 6 в форме сегмента окружности.
С другой стороны поршня 2(1) элемент зацепления выполнен в виде двух параллельных друг другу сегментных пазов 7 пересеченных осевой расточкой 8, выполненной на глубину, превышающую длину размещенного в ней штока 3 соседнего поршня 1(2). Между торцом 9 поршня 2 и одним из сегментных пазов 7 выполнен до пересечения с последним и с осевой расточкой 8 прямоугольный радиальный паз 10. При этом образованы опорные площадки 11-14.
Суммирующий цифровой механизм работает следующим образом.
При отсутствии давления в полостях между поршнями 1 и 2 последние сжаты постоянно действующей осевой силой и упор поршней при этом друг в друга осуществляется на кольцевые площадки 11 и 12 При подаче командного давления поршни расходятся, и упор их друг в друга в этом случае осуществляется на площадки 13 и 14 Поскольку все опорные площадки выполне ны в плоскости перпендикулярной оси плавающих поршней силы, действующие при взаимодействии площадок, направлены пд раллельно оси суммирующего механизма, а изгибающий момент равен нулю. В результате этого исключаются перекосы, заедания поршней и. следовательно, улучшаются динамические характеристики ЦАП и исключа ются связанные с перекосами отказы в работе, а за счет увеличения рабочей контактной площади опорных площадок уменьшается контактное давление, что исключает деформацию поршней и увеличивает ресурс
работы механизма суммирования и ЦАП. Суммарное перемещение поршней равно перемещению позиционируемого золотника.
За счет отсутствия изгибающего момента исключено заклинивание плавающих поршней в направляющей гильзе, что повышает количественные показатели надежности (вероятность безотказной работы),
являющиеся выражением вероятности отказов устройства в цепом.
За счет увеличения площади контактирующих поверхностей при взаимодействии плавающих поршней друг с другом уменьшается давление на эти поверхности, что значительно увеличивает ресурс безотказной работы суммирующего механизма, а также уменьшается деформация (смятие) поверхностей взаимодействующих между
собой площадок плавающих поршней, что дополнительно повышает надежность и точность отработки механизма
Кроме того, увеличивается быстродействие срабатывания суммирующего механизма за счет уменьшения трения плавающих поршней при их перемещении в связи с устранением перекосов, т.е улучшаются динамические характеристики устройства.
Формула изобретения
Суммирующий цифровой механизм, преимущественно для позиционирования золотника содержащий размещенные последовательно с зазорами в гильзе плавающие поршни, попарно связанные между собой элементами зацепления, выполненными заодно с поршнями с одной стороны каждого из последних в виде штока с двумя параллельными лысками и с буртом на конце, а с другой стороны - с виде прямоуголь- ных пазов, образующих поперечные опорные и продольные направляющие площадки для взаимодействия с буртом и штоком соседнего поршня, отличающий- с я тем, что, с целью повышения быстродействия и надежности за счет исключения отказов, связанных с перекосами поршней, на каждом штоке бурт выполнен Т-образным с вершиной в форме сегмента окружности,
размещенной в одном из двух параллельных друг другу сегментных пазов, выполненных на поверхности соседнего поршня и пересеченных осевой расточкой, выполненной на глубину, превышающую длину размёщенного в ней штока, при этом между торцом поршня и одним из сегментных пазов выполнен до пересечения с последним и с осевой расточкой прямоугольный радиальный паз,
27
И
1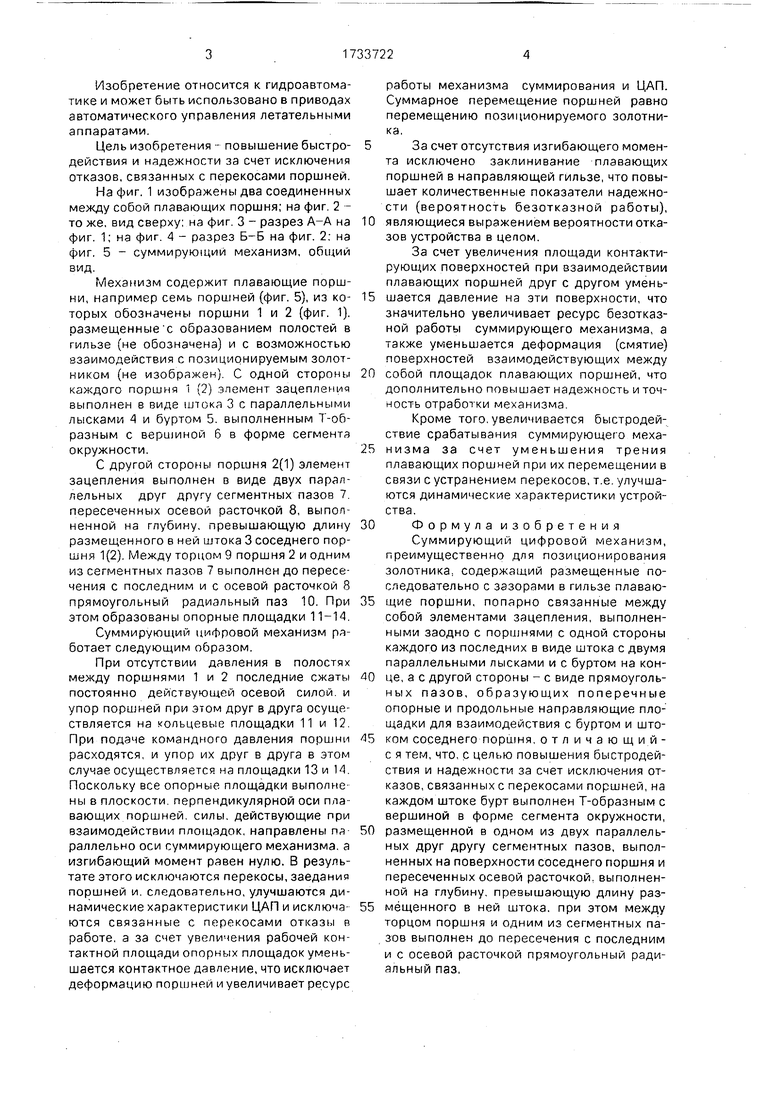
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОАНАЛОГОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ГИДРАВЛИЧЕСКОГО ПРИВОДА | 2000 |
|
RU2174627C1 |
| ЦИФРОАНАЛОГОВЫЙ ПРЕОБРАЗОВАТЕЛЬ ГИДРАВЛИЧЕСКОГО ПРИВОДА | 2005 |
|
RU2313698C2 |
| Цифровой привод | 1990 |
|
SU1791625A1 |
| ДИСКОВЫЕ НОЖНИЦЫ | 2004 |
|
RU2317180C2 |
| Устройство для подвода жидкости к вращающемуся валу | 1983 |
|
SU1106692A1 |
| ГИДРАВЛИЧЕСКИЙ ИНЪЕКТОР | 1988 |
|
RU1630048C |
| ГИДРАВЛИЧЕСКИЙ ИНЪЕКТОР И.А.ХАНИНА | 1986 |
|
RU1474941C |
| Устройство для дорнования | 1975 |
|
SU557885A1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| Устройство для гидропрессования с противодавлением | 1982 |
|
SU1049153A1 |
Изобретение относится к гидроавтоматике и может быть использовано в привода автоматического управления летательными аппаратами. Цель изобретения - повышение быстродействия и надежности за смет исключения отказов, связанных с перекосами поршней. При подаче командного давления в гильзу осуществляется взаимодействие поршней с помощью штоков 3 слысками 4 и буртом 5. выполненным Т-образным с вершиной в форме сегмента окружности, размещенной в одном из пазов 7 соседнего поршня. При этом поршни раздвигаются и упор их друг в другу в этом случае осуществляется на площадки, выполненные в плоскости, перпендикулярной оси плавающих поршней. При этом силы, действующие при взаимодействии площадок, направлены параллельно оси механизма суммирования, а изгибающий момент равен нулю, в результате чего исключаются перекосы, заедания поршней и, следовательно, улучшаются динамические характеристики (быстродействие) механизма и исключаются связанные с этим отказы при работе, а за счет увеличения рабочей контактной площади опорных площадок уменьшается контактное давление, что исключает деформацию поршней и увеличивает ресурс работы механизма. 5 ил. (Л С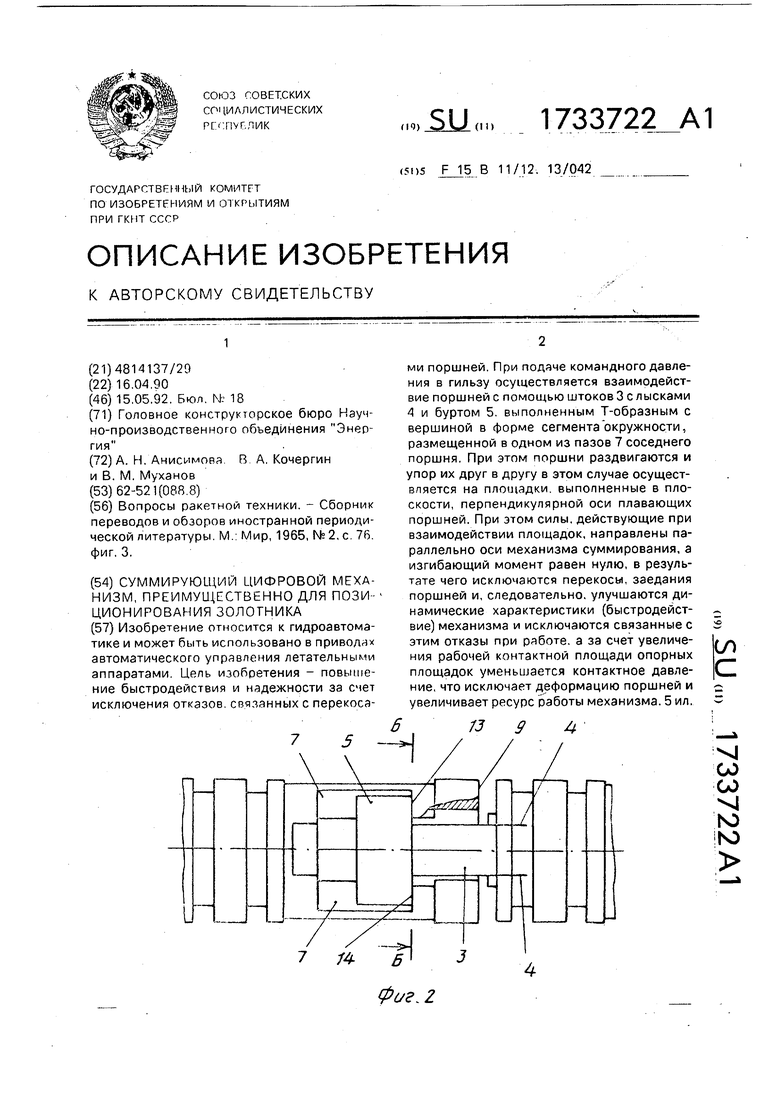
Фиг.1
A -A
. J
A
/2
6-5
W
$je. -4
733722
,
I
| Вопросы ракетной техники | |||
| - Сборник переводов и обзоров иностранной периодической литературы | |||
| М | |||
| Мир, 1965, №2, с 76 | |||
| фиг | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
