Изобретение относится к обработке металлов давлением, может быть использовано для отделения плоских заготовок от стопы и подачи их в рабочую зону пресса, а также является частью манипуляторов и промышленных роботов, агрегатируемых с кузнечно- TipeccoBbiM и другим станочным оборудованием.
Цель изобретения - повышение производительности путем быстродействия сброса заготовки и повышения надежности захвата, а также повышение удобства обслуживания за счет быстросменности присоски.
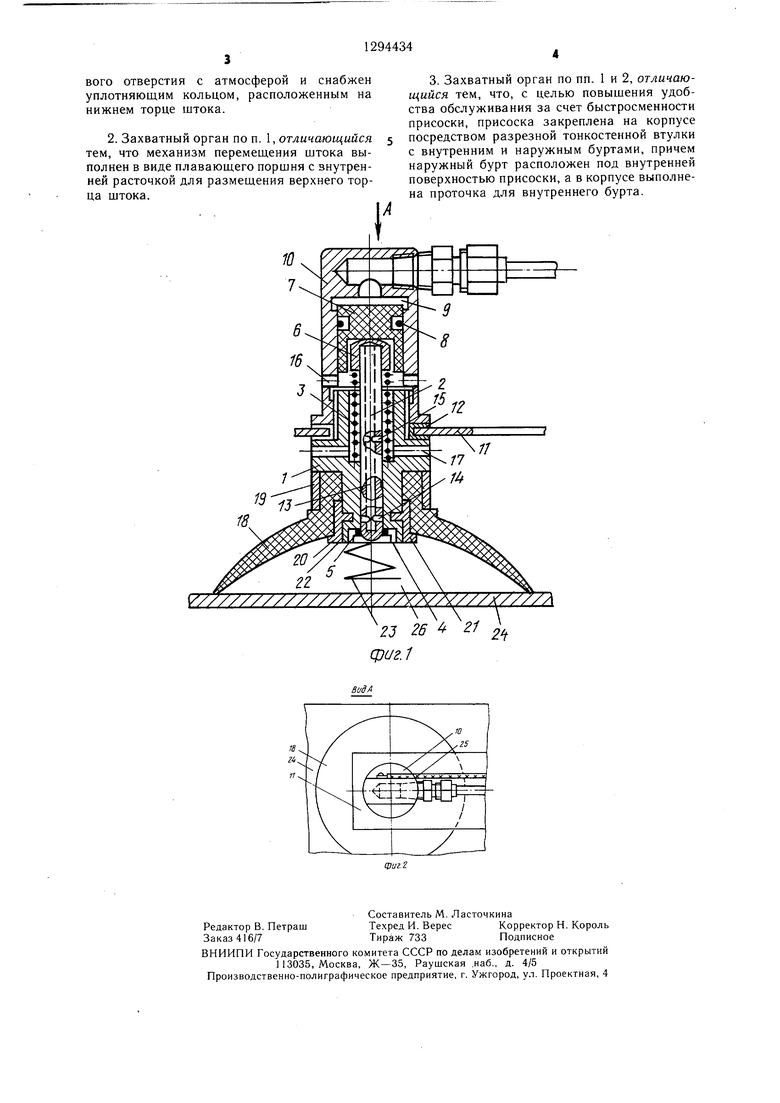
На фиг. 1 показан вакуумный захватный орган; продольный разрез; на фиг. 2 - вид А на фиг. 1.
Вакуумный захватный орган состоит из корпуса 1 с центральным отверстием, в котором смонтирован шток 2, выполняюш,ий функцию подпружиненного в осевом направлении пружиной 3 клапана, герметизирующего центральное отверстие буртом 4 и уплотнительным кольцом 5. На верхнем торце штока 2 установлен упор 6, в который упирается пружина 3, расположенная на штоке 2 в отверстии корпуса 1. На упор 6 штока опирается плаваюший поршень 7, имеющий расточку под упор 6 штока 2 и расположенное в наружной расточке поршня уплотни- тельное кольцо 8. Поршень расположен в полости 9 резьбовою стакана 10, навинченного через держатель 11 и электрически изолирующий материал 12 на корпус 1. Шток 2 выполнен с глухим центральным 13 и расположенными в два ряда радиальными отверстиями 14 и 15, соединяющимися с атмосферой через отверстие 16 в стакане 10 и от верстие 17 в корпусе 1.
На корпусе 1 внизу (по чертежу) смонтирована из эластичного материала присоска 18 и кольцо 19, охватывающее основание кольцеобразного выступа присоски снаружи, во внутреннем отверстии которого между последним и корпусом 1, входя в проточки своими внутренними буртами, располагаются части 20 и 21 разрезной тонкостенной втулки, внешний бурт 22 которой упирается во внутреннюю горизонтальную поверхность присоски 18.
На корпусе 1 закреплен выполненный из токопроводящего материала в форме пружины датчик 23 наличия вакуума, ответным элементом которого является транспортируемая присоской 18 деталь 24. К металлическим частям, в частности к стакану 10, подсоединен электрический провод 25, соединяющий металлические части вакуумного захвата через электрическое табло с источником питания (не показаны). В разрезе между частями 20 и 21 разрезной втулки монтируется прямой участок датчика 23 наличия вакуума с заведением его в проточку под внутренний бурт разрезной втулки.
Позицией 26 обозначена вакуумная полость.
Вакуумный захватный орган работает следующим образом.
В исходном положении давление над порщнем 7 отсутствует и шток плотно прижат к уплотнительному кольцу 5 вакуумная полость 26 не сообщается с атмосферой. При перемещении вакуумного захватного ор- нана вниз, на деталь, присоска 18 прижимается к поверхности детали 24, вытесняя воздух из вакуумной полости 26 через поверхность контакта присоски с деталью 24. При ходе вакуумного захватного органа вверх создается разрежение и деталь 24
за счет перепада давлений удерживается захватом. Держатель 11 руки манипулятора (не показано) перемещает деталь 24 на позицию обработки. Для сброса детали с захватного органа сжатый воздух подается в полость 9, плавающий поршень воздействует
на щток 2, опуская его вниз, и вакуумная полость 26 присоски 18 соединяется с атмосферой через отверстия 13 и 14. Вакуум нарушается, и деталь 24 под собственным весом отделяется от захватного органа. Для более быстрого отделения детали 24 от присоски 18 усилие поршня 7 воздействует через шток 2 клапана на эту деталь. При захвате присоской 18 детали 24 датчик 23 наличия вакуума, соприкасаясь с деталью, замыкает электрическую цепь и на табло
загорается сигнальная лампочка.
По сравнению с известным захватом при равных габаритах по высоте габариты в плане металлических частей уменьшены на 35-37°/о, расход воздуха уменьшен в 4,2- 4,3 раза, улучшилось техническое обслуживание, а введение электрической сигнализации о наличии вакуума почти полностью исключает аварийные ситуации при транспортировании заготовок и изделий.
40
Формула изобретения
1. Вакуумный захватный орган, содержащий корпус с центральным отверстием, расположенный в последнем шток с глухим осевым отверстием, полую присоску из эластичного материала, закрепленную на корпусе, и механизм перемещения штока, отличающийся тем, что, с целью повыщения производительности путем быстродействия сброса заготовки и повыщения надежности захвата, он сабжен датчиком наличия вакуума, выполненным в виде пружины из токопроводящего материала, закрепленного на нижнем торце штока для взаимодействия с заготовкой, источником питания, электрически связанным с датчиком наличия вакуума посредством металлических частей захват5 ного органа и электрического табло, при этом шток выполнен подпружиненным в осевом направлении с двумя рядами радиальных отверстий для соединения глухого осевого отверстия с атмосферой и снабжен уплотняющим кольцом, расположенным на нижнем торце штока.
2. Захватный орган по п. 1, отличающийся тем, что механизм перемещения щтока выполнен в виде плавающего порщня с внутренней расточкой для размещения верхнего торца штока.
3. Захватный орган по пп. 1 и 2, отличающийся тем, что, с целью повышения удобства обслуживания за счет быстросменности присоски, присоска закреплена на корпусе посредством разрезной тонкостенной втулки с внутренним и наружным буртами, причем наружный бурт расположен под внутренней поверхностью присоски, а в корпусе выполнена проточка для внутреннего бурта.
J 2ff 21 2 фиг. 1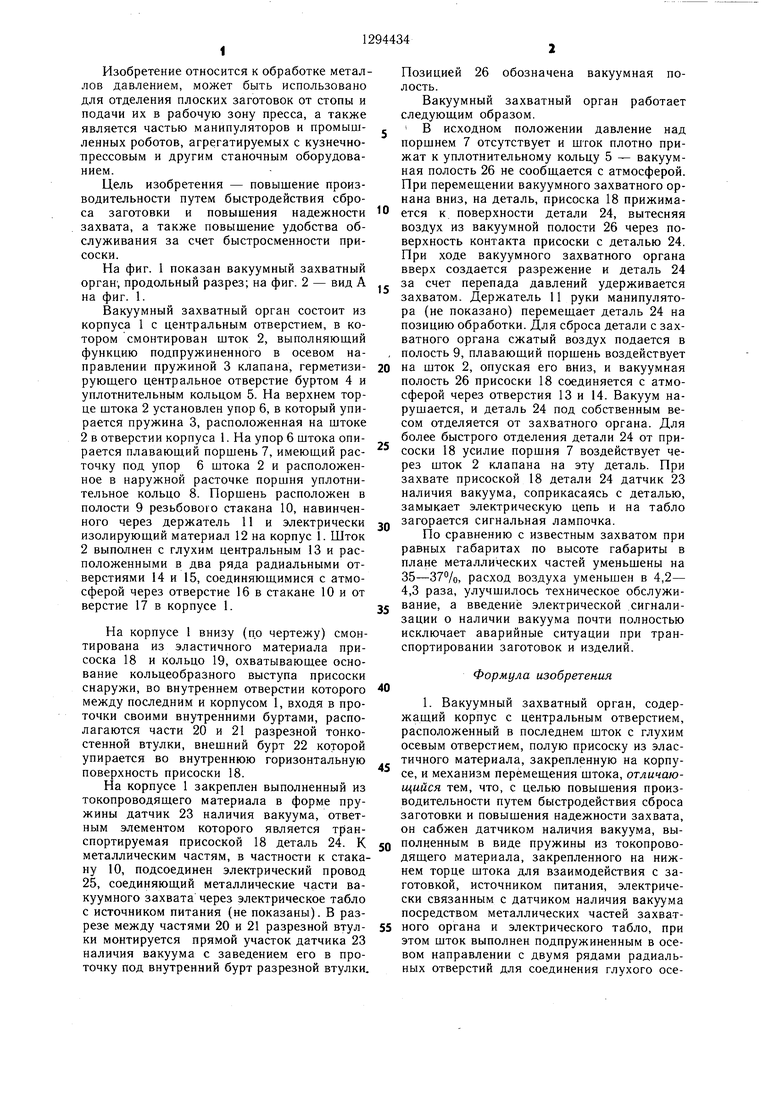
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захватный орган | 1981 |
|
SU1005996A1 |
| Вакуумный захватный орган | 1982 |
|
SU1107937A1 |
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |
| Вакуумный захватный орган | 1986 |
|
SU1386446A1 |
| Вакуумный захватный орган | 1980 |
|
SU912617A1 |
| Вакуумный захватный орган | 1977 |
|
SU644579A1 |
| Вакуумный захватный орган | 1981 |
|
SU963639A1 |
| ОЧУВСТВЛЕННЫЙ ВАКУУМНЫЙ ЗАХВАТ | 2005 |
|
RU2283751C1 |
| Вакуумный захватный орган | 1980 |
|
SU946743A1 |
| Вакуумный захватный орган | 1980 |
|
SU925820A1 |
Изобретение относится к области обработки металлов давлением и может быть использовано для отделения плоских заготовок от стопы и подачи их в рабочую зону пресса. Целью изобретения является повышение производительности путем быстродействия сброса заготовки и повышение надежности захвата и удобства обслуживания за счет быстросменности присоски. При перемещении вакуумного захвата вниз присоска прижимается к поверхности детали, вытесняя воздух из вакуумной полости (ВП). При ходе вакуумного захвата вверх создается разрежение и детали удерживаются за счет перепада давлений. При захвате детали датчик наличия вакуума, соприкасаясь с заготовкой, замыкает электрическую цепь и на табло загорается сигнальная лампочка. Для сброса заготовки сжатый воздух воздействует на плавающий поршень, а через него на шток. Шток опускается. При этом ВП присоски соединяется с атмосферой через отверстия в штоке. В ВП устанавливается атмосферное давление, и заготовка под действием собственного веса отделяется от захвата. 2 з.п. ф-лы,, 2 ил. « (Л 1чЭ со 4 4 СО 4
Редактор В. Петраш Заказ 416/7
Составитель М. Ласточкина Техред И. ВересКорректор Н. Король
Тираж 733Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, , Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Вакуумный захватный орган | 1982 |
|
SU1106568A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
