Изобретение относится к робототехнике на основе пространственных платформенных механизмов параллельной структуры и может найти применение в разных областях машиностроения, в обрабатывающих центрах, хирургии и испытательных стендах.
Известен платформенный манипулятор параллельной структуры в виде платформы Стюарта, содержащий опорное основание и круглую подвижную платформу, соединенные между собой посредством шести подвижных стержневых опор через 12 сферических шарниров с приводом от 6 линейных двигателей - (книга Вульфсон И.И. и др. «Механика машин»: Учеб. Пособие для ВТУЗов. - М.: Высш. Шк., 1996 г., с. 28, рис. 1.20) - аналог.
Недостатками известного манипулятора являются сложность конструкции и большие габариты из-за применения большого количества сложных в изготовлении и сборке сферических шарниров с большим комплектом двигателей, имеющих сложную систему управления из-за их кинематической взаимосвязи.
Наиболее близким, по технической сущности и достигаемому эффекту, к предлагаемому изобретению является платформенный робот, содержащий опорное основание и многоугольную подвижную платформу с устройством ее привода, кинематически связанные между собой через установленные на каждой из вершин многоугольной платформы три трехподвижных сферических шарнира и стержневые подвижные опоры в виде линейных многозвенных кинематических цепей, образующих параллельные между собой 6-сторонник податливые замкнутые контуры (схема платформенного робота в статье Мирзаев Р.А., Смирнов Н.А. «Исследование кинематики манипулятора параллельной структуры (дельта-механизм)» / Вестник Сибирского государственного аэрокосмического университета, 2012. Выпуск 4, с. 46-50, рис. 1) - прототип.
Недостатками указанного платформенного робота являются:
1. Сложная конструкция и высокая трудоемкость изготовления и сборки трех применяемых сложных сферических шарниров из-за необходимости выполнения внутренней и внешней сферических поверхностей каждого из трех указанных сложных шарниров с точным пересечением строго в одной точке пространства всех трех осей их вращения (United States Patent No. 4, 628, 765/1986 год).
2. Низкая жесткость и точность позиционирования из-за выполнения замкнутой кинематической цепи привода подвижной платформы робота с податливыми под рабочей нагрузкой 6-сторонними шарнирными замкнутыми контурами при сборке рычажных звеньев.
3. Ограниченная узким конусом вращения (при сложной совместной работе всех трех приводных двигателей) рабочая зона дельта-механизма робота (см. рис. 4 в указанной статье Мирзаева Р.А., Смирнов Н.А., №4/21012 г.).
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции платформенного робота, повышении его жесткости и точности позиционирования, а также расширении его рабочей зоны обслуживания и упрощении системы его управления за счет устранения указанных недостатков.
Получение технического результата достигается за счет того, что предлагаемый платформенный VIP-робот содержит опорное основание и многоугольную подвижную платформу с устройством ее привода, кинематически связанные между собой одинаковыми стержневыми подвижными опорами в виде шарнирного антипараллелограмма с вращательными кинематическими парами, в котором два коротких параллельных звена шарнирно соединены с многоугольной подвижной платформой и с опорным основанием через промежуточное двухшарнирное звено, а также кинематически связаны между собой через два попарно скрещивающихся длинных шарнирных звена.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6, фиг. 7, фиг. 8, фиг. 9, фиг. 10, фиг. 11 и фиг. 12.
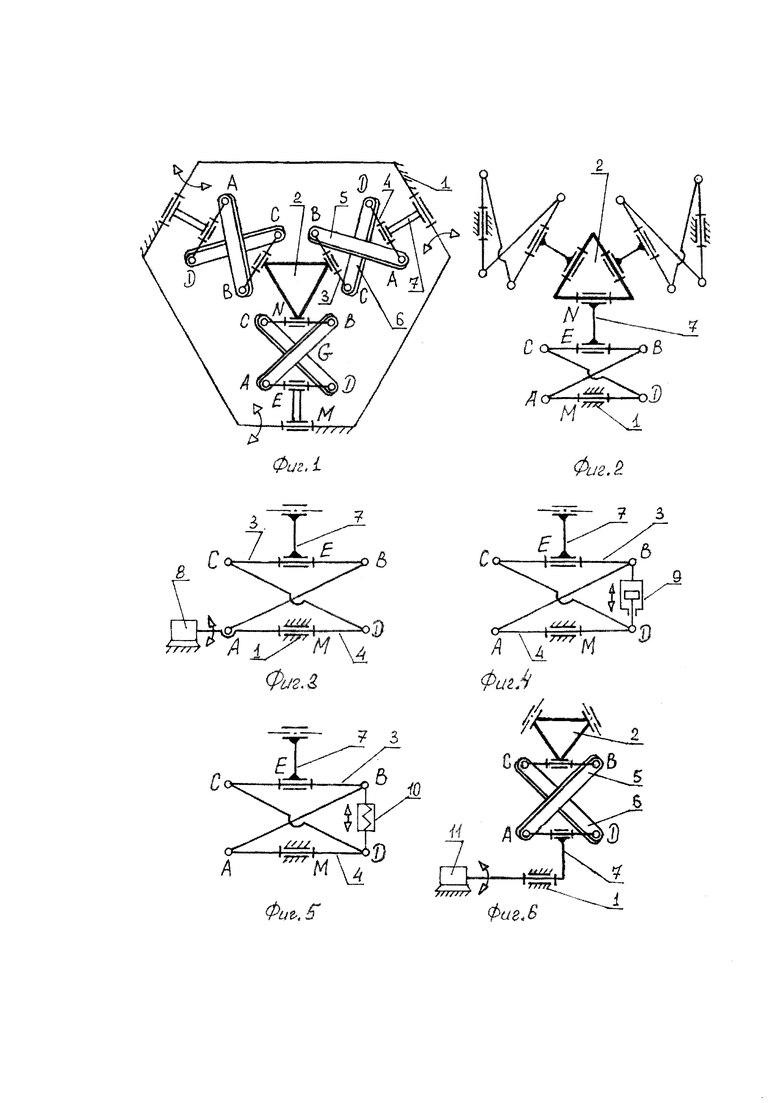
На фиг. 1 изображен общий вид платформенного VIP-робота (в исходном положении), содержащего опорное основание 1 и многоугольную, например, треугольную, подвижную платформу 2 с устройством ее привода, связанные между собой посредством трех одинаковых стержневых подвижных опор, каждая из которых выполнена в виде шарнирного антипараллелограмма ABCD с параллельными осями вращательных кинематических пар А, В, С и D, состоящего из двух параллельных между собой коротких шарнирных звеньев 3 и 4 одинаковой длины l1=AD=ВС, которые при их сборке образуют в кинематической цепи трехсторонние пространственные замкнутые контуры AGD и BGC.
Подвижная платформа 2 и опорное основание 1 кинематически связаны между собой через промежуточные двухшарнирные звенья 7 с параллельными осями вращательных кинематических пар и шарнирные антипараллелограммы ABCD. Короткие звенья 3 и 4 в ABCD совместно с промежуточными двухшарнирными звеньями 7 при их сборке в замкнутую кинематическую цепь образуют вращательные кинематические пары N, Е и М, оси которых перпендикулярны осям вращательных кинематических пар А, В, С и D соответствующих шарнирных антипараллелограммов ABCD. В представленном на фиг. 1 варианте выполнения VIP-робота промежуточные двухшарнирные звенья 7 установлены на опорном основании 1 и образуют замкнутую кинематическую цепь механизма параллельной структуры с тремя степенями свободы.
На фиг. 2 представлен вариант выполнения VIP-робота, в котором промежуточные двухшарнирные звенья 7 установлены на подвижной платформе 2 с тремя одинаковыми стержневыми подвижными опорами, которая имеет три степени свободы привода антипараллелограммов ABCD.
На фиг. 3 представлен вариант выполнения устройства привода подвижной платформы в виде установленного на опорном основании поворотного двигателя 8 с приводной вращательной кинематической парой М, образованной коротким шарнирным звеном 4 каждого антипараллелограмма ABCD с опорным основанием 1.
На фиг. 4 представлен вариант выполнения устройства привода подвижной платформы в виде линейного двигателя с приводной поступательной кинематической парой подвижного гидроцилиндра 9, установленного между параллельными короткими шарнирными звеньями 3 и 4 каждого антипараллелограмма ABCD.
На фиг. 5 представлен вариант выполнения устройства привода подвижной платформы в виде линейного двигателя с приводной винтовой кинематической парой 10, установленной между параллельными короткими шарнирными звеньями 3 и 4 каждого антипараллелограмма ABCD.
На фиг. 6 представлен вариант выполнения устройства привода подвижной платформы 2 в виде установленного на опорном основании 1 поворотного двигателя 11 с приводной вращательной кинематической парой, образованной промежуточным двухшарнирным звеном 7 и опорным основанием 1 в замкнутой кинематической цепи с выполнением попарно скрещивающихся звеньев антипараллелограмма ABCD в виде прямых пластин 5 и 6.
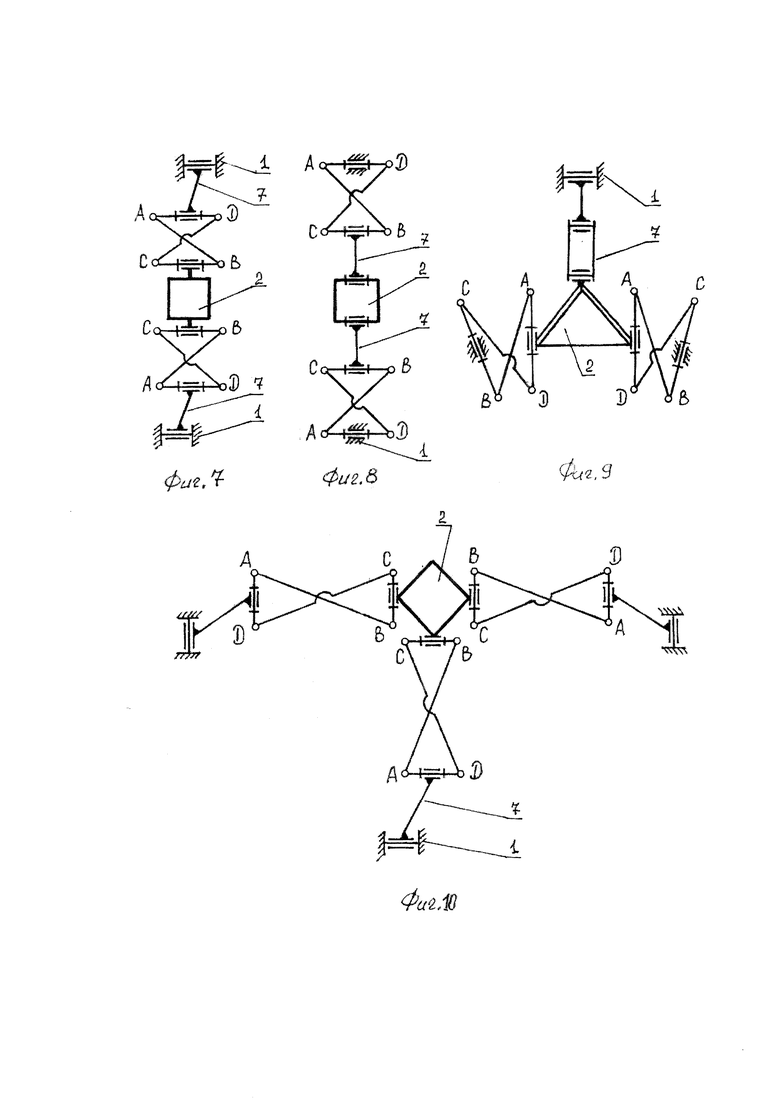
На фиг. 7 представлен вариант выполнения платформенного VIP-робота с двумя степенями свободы, замкнутая кинематическая цепь которого содержит две стержневые подвижные опоры платформы 2 и промежуточные двухшарнирные звенья 7, соединенные с антипараллелограммами ABCD и установленные на опорном основании 1.
На фиг. 8 представлен вариант выполнения платформенного VIP-робота с двумя степенями свободы, замкнутая кинематическая цепь которого содержит две стержневые подвижные опоры платформы 2 и промежуточные двухшарные звенья 7, установленные между антипараллелограммами ABCD и подвижной платформой 2.
На фиг. 9 представлен вариант выполнения платформенного VIP-робота с тремя степенями свободы, замкнутая кинематическая цепь которого содержит три стержневые подвижные опоры, которые шарнирно связывают подвижную платформу 2 и опорное основание 1 через антипараллелограммы ABCD и промежуточное двухшарнирное звено 7.
На фиг. 10 представлен вариант выполнения платформенного VIP-робота с тремя степенями свободы, замкнутая кинематическая цепь которого содержит три стержневые подвижные опоры с антипараллелограммами ABCD, два из которых расположены перпендикулярно к третьему и установлены параллельно между собой.
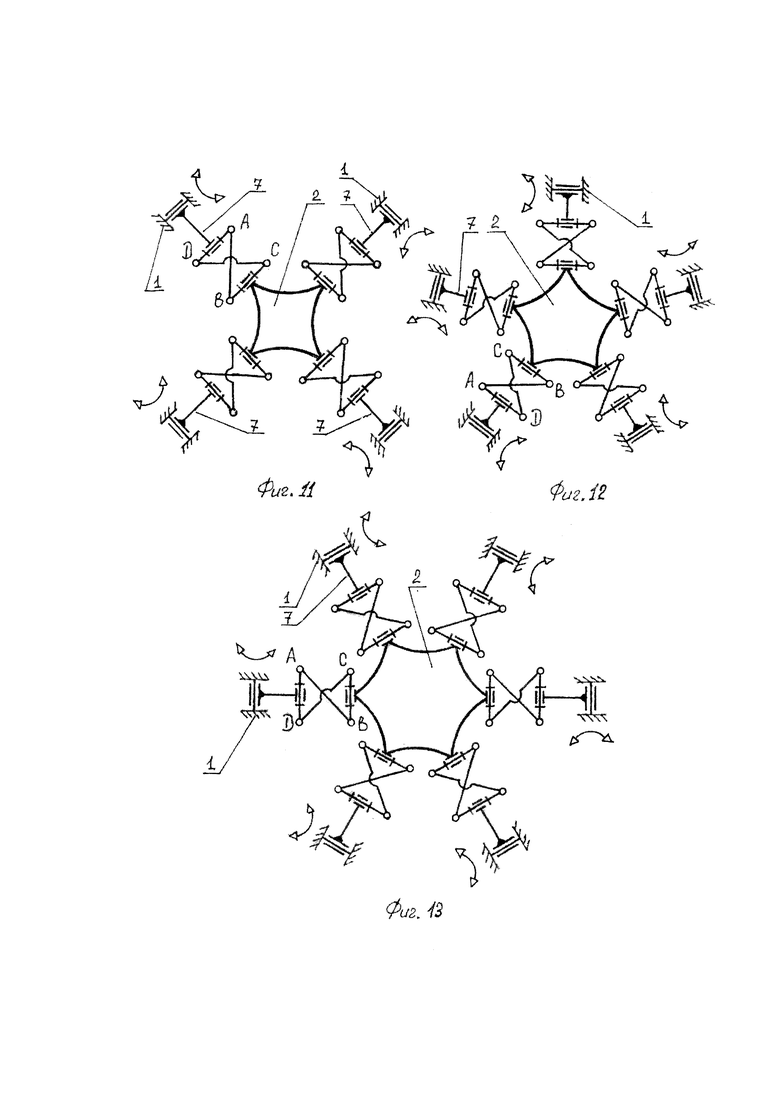
На фиг. 11 представлен вариант выполнения VIP-робота, в котором промежуточные двухшарнирные звенья 7 установлены на опорном основании 1, а стержневые подвижные опоры с шарнирным антипараллелограммрм ABCD соединены с четырехугольной подвижной платформой 2 и образуют замкнутую кинематическую цепь механизма параллельной структуры с четырьмя степенями свободы, содержащего четыре одинаковые стержневые подвижные опоры.
На фиг. 12 представлен вариант выполнения VIP-робота, в котором промежуточные двухшарнирные звенья 7 установлены на опорном основании 1, а стержневые подвижные опоры с шарнирным антипараллелограммом ABCD соединены с пятиугольной подвижной платформой 2 и образуют замкнутую кинематическую цепь механизма параллельной структуры с пятью степенями свободы, содержащего пять одинаковых стержневых подвижных опор.
На фиг. 13 представлен вариант выполнения VIP-робота, в котором промежуточные двухшарнирные звенья 7 установлены на опорном основании 1, а стержневые подвижные опоры с шарнирным антипараллелограммом ABCD соединены с шестиугольной подвижной платформой 2 и образуют замкнутую кинематическую цепь механизма параллельной структуры с шестью степенями свободы, содержащего шесть одинаковых стержневых подвижных опор.
Работа представленного платформенного VIP-робота установлена при натуральном эксперименте на действующей модели этого робота и заключается в следующих вариантах управления движением платформы 2:
1) При отдельном включении привода звеньев только в одном из антипараллелограммов ABCD обеспечивается соответствующий угловой поворот многоугольной подвижной платформы 2 вокруг одной из осей, расположенных в общей горизонтальной плоскости параллельно оси вращательной кинематической пары М данного антипараллелограмма ABCD.
2) Одновременное включение приводов в разных антипараллелограммах ABCD приводит к поступательному движению платформы 2 вдоль одной из осей прямоугольной системы координат с сохранением заданной ориентации подвижной платформы.
3) Увеличение в конструкции VIP-робота количества (с трех до шести) стержневых подвижных опор с шарнирным антипараллелограммом ABCD приводит к соответствующему увеличению числа управляемых степеней свободы VIP-робота (тоже с трех до шести), что увеличивает (в пределе до шести) число реализуемых движений подвижной платформы.
Достигаемый в предлагаемом платформенном VIP-роботе положительный эффект заключается в следующем:
1. Упрощение конструкции платформенного робота за счет выполнения всех подвижных соединений его звеньев на основе только простых вращательных одноподвижных кинематических пар.
2. Повышение жесткости и точности позиционирования за счет возникающих при сборке антипараллелограммов трехсторонних пространственных замкнутых контуров повышенной жесткости, образуемых попарно скрещивающимися в них звеньями.
3. Упрощение системы управления роботом с несколькими степенями свободы и расширение при этом его рабочей зоны, включающей кинематическую развязку отдельных вращательных движений подвижной платформы с рабочим органом и ее дополнительную возможность поступательного перемещения с сохранением заданной ориентации рабочего органа
| название | год | авторы | номер документа |
|---|---|---|---|
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ СКЛАДЫВАЮЩИЙСЯ МАНИПУЛЯТОР | 2021 |
|
RU2759552C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
| ПЛАТФОРМЕННЫЙ СТЫКОВОЧНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751781C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ИЗБЫТОЧНЫМ ПРИВОДОМ | 2021 |
|
RU2782460C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2751780C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР | 2019 |
|
RU2722165C1 |
| ПРОСТРАНСТВЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758374C1 |
Изобретение относится к робототехнике и может быть использовано в обрабатывающих центрах, в хирургии, на испытательных и сборочных стендах. Платформенный робот содержит опорное основание и многоугольную подвижную платформу с приводом. Платформа и опорное основание кинематически связаны между собой посредством стержневых подвижных опор и промежуточных двухшарнирных звеньев. Каждая из подвижных опор выполнена в виде шарнирного антипараллелограмма с параллельными осями вращательных кинематических пар, состоящего из двух параллельных коротких шарнирных звеньев и двух соединяющих их и попарно скрещивающихся между собой длинных шарнирных звеньев. Короткие звенья соединены с опорным основанием и подвижной многоугольной платформой посредством промежуточных двухшарнирных звеньев. В результате обеспечивается упрощение конструкции робота, повышение его жесткости и точности позиционирования, а также расширение его рабочей зоны. 9 з.п. ф-лы, 13 ил.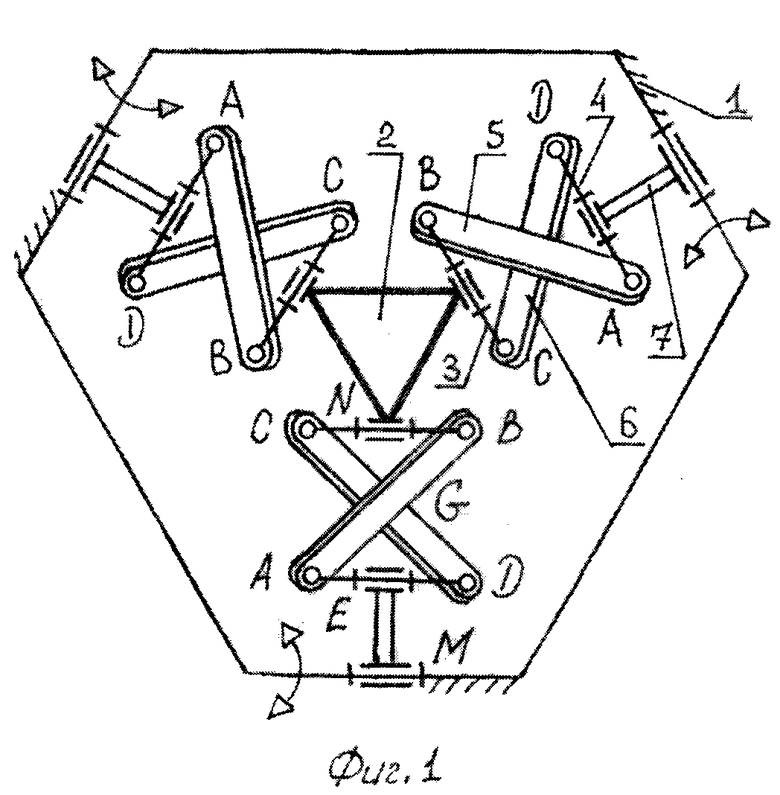
1. Платформенный робот, содержащий кинематически связанные между собой опорное основание и многоугольную подвижную платформу с приводом, отличающийся тем, что подвижная платформа и опорное основание кинематически связаны между собой посредством стержневых подвижных опор и промежуточных двухшарнирных звеньев с параллельными осями вращательных кинематических пар, при этом каждая из стержневых подвижных опор выполнена в виде шарнирного антипараллелограмма с параллельными осями вращательных кинематических пар, состоящего из двух параллельных коротких шарнирных звеньев одинаковой длины  и двух соединяющих их и попарно скрещивающихся между собой длинных шарнирных звеньев одинаковой длины
и двух соединяющих их и попарно скрещивающихся между собой длинных шарнирных звеньев одинаковой длины  при этом короткие звенья шарнирных антипараллелограммов соединены с опорным основанием и подвижной многоугольной платформой посредством промежуточных двухшарнирных звеньев с образованием вращательных кинематических пар, оси которых перпендикулярны осям вращательных кинематических пар соответствующих шарнирных антипараллелограммов.
при этом короткие звенья шарнирных антипараллелограммов соединены с опорным основанием и подвижной многоугольной платформой посредством промежуточных двухшарнирных звеньев с образованием вращательных кинематических пар, оси которых перпендикулярны осям вращательных кинематических пар соответствующих шарнирных антипараллелограммов.
2. Робот по п. 1, отличающийся тем, что привод подвижной платформы выполнен в виде поворотного двигателя, установленного на опорном основании с образованием коротким звеном каждого антипараллелограмма приводной вращательной кинематической пары с опорным основанием.
3. Робот по п. 1, отличающийся тем, что привод подвижной платформы выполнен в виде приводной поступательной кинематической пары, например, гидроцилиндра, установленной в каждом антипараллелограмме между его короткими шарнирными звеньями одинаковой длины.
4. Робот по п. 1, отличающийся тем, что привод подвижной платформы выполнен в виде поворотного двигателя для каждой стержневой подвижной опоры, установленного на опорном основании с образованием промежуточным двухшарнирным звеном приводной вращательной кинематической пары с опорным основанием, а попарно скрещивающиеся шарнирные звенья в каждом антипараллелограмме выполнены в виде прямых пластин.
5. Робот по п. 1, отличающийся тем, что подвижная платформа соединена с опорным основанием посредством двух стержневых подвижных опор с шарнирными антипараллелограммами, установленными в параллельных плоскостях с образованием замкнутой кинематической цепи механизма параллельной структуры с двумя степенями свободы
6. Робот по п. 1, отличающийся тем, что подвижная платформа выполнена треугольной и соединена с опорным основанием посредством трех стержневых подвижных опор с шарнирными антипараллелограммами, установленными в трех пересекающихся между собой плоскостях с образованием замкнутой кинематической цепи механизма параллельной структуры с тремя степенями свободы.
7. Робот по п. 1, отличающийся тем, что подвижная платформа выполнена треугольной и соединена с опорным основанием посредством трех стержневых подвижных опор с шарнирными антипараллелограммами, два из которых установлены параллельно друг другу и перпендикулярно третьей стержневой подвижной опоре с образованием замкнутой кинематической цепи механизма параллельной структуры с тремя степенями свободы.
8. Робот по п. 1, отличающийся тем, что подвижная платформа выполнена четырехугольной и соединена с опорным основанием посредством четырех стержневых подвижных опор с шарнирными антипараллелограммами, установленными в четырех попарно параллельных плоскостях с образованием замкнутой кинематической цепи механизма параллельной структуры с четырьмя степенями свободы.
9. Робот по п. 1, отличающийся тем, что подвижная платформа выполнена пятиугольной и соединена с опорным основанием посредством пяти стержневых подвижных опор с шарнирными антипараллелограммами, установленными в пяти пересекающихся между собой плоскостях с образованием замкнутой кинематической цепи механизма параллельной структуры с пятью степенями свободы.
10. Робот по п. 1, отличающийся тем, что подвижная платформа выполнена шестиугольной и соединена с опорным основанием посредством шести стержневых подвижных опор с шарнирными антипараллелограммами, установленными в шести попарно параллельных и пересекающихся между собой плоскостях с образованием замкнутой кинематической цепи механизма параллельной структуры с шестью степенями свободы.
| МИРЗАЕВ Р.А., СМИРНОВ Н.А | |||
| Исследование кинематики манипулятора параллельной структуры (дельта-механизм) | |||
| Вестник Сибирского государственного аэрокосмического университета, 2012, Выпуск 4, с | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР | 2019 |
|
RU2722165C1 |
| ОРИЕНТИРУЮЩАЯ ПЛАТФОРМА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2714147C1 |
| ОПОРА КАЧЕНИЯ ДЛЯ ШЕСТЕРНИ БОЛЬШОГО ДИАМЕТРА | 0 |
|
SU164091A1 |
| US 20020007690 A1, 24.01.2002 | |||
| US 4976582 A1, 11.12.1990. | |||

