| название |
год |
авторы |
номер документа |
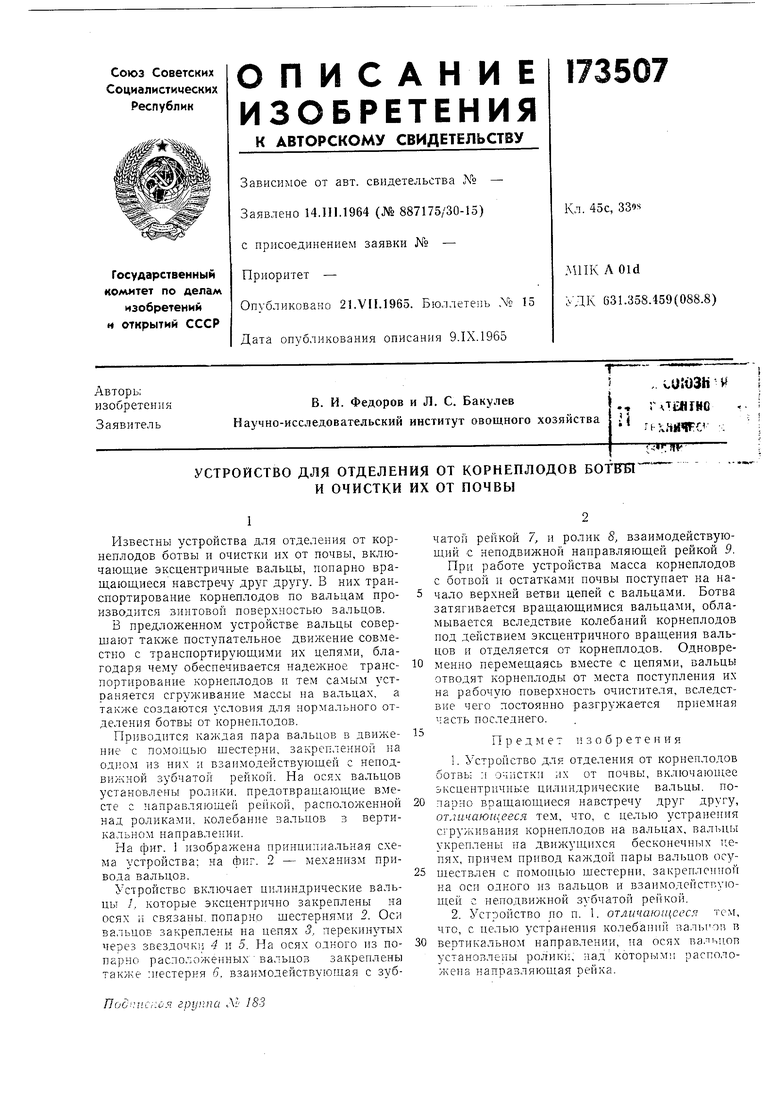
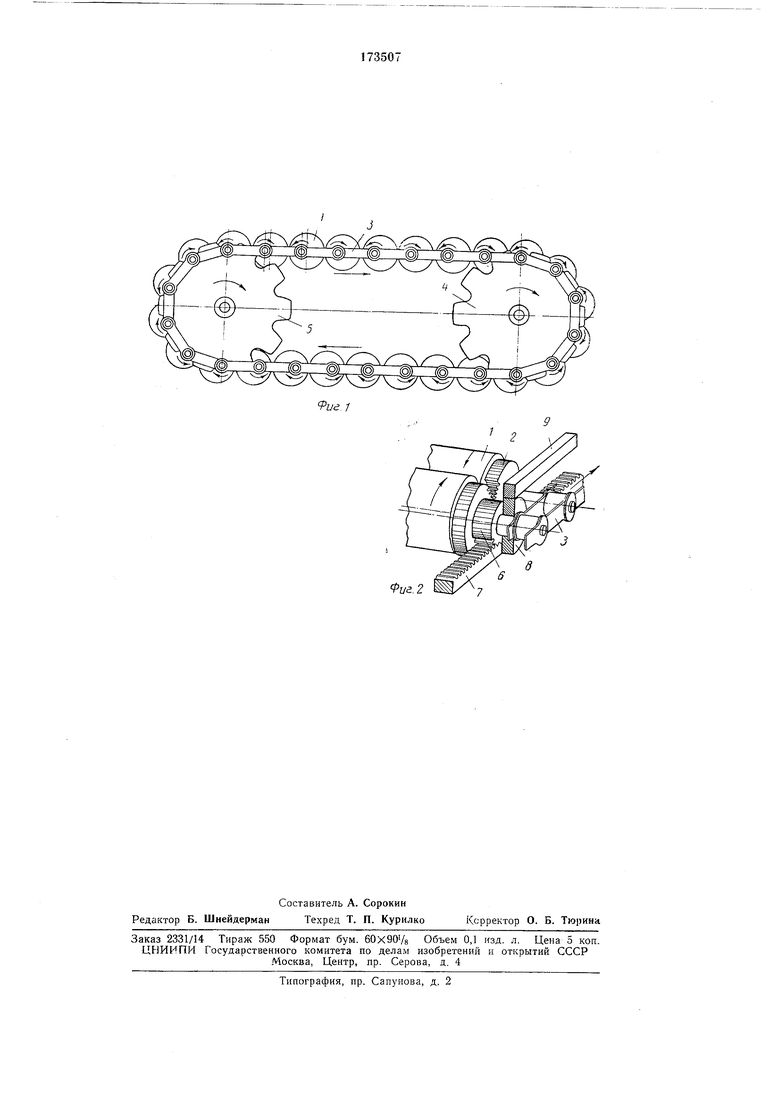
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ НЕСКОЛЬКИХ ПОТОКОВ БУТЫЛОК В ОДИН1Изобретение относится к производству бутылок, а именно к устройствам для соединения нескольких потоков 'бутылок в один.Известно устройство для соединения нескольких потоков бутылок IB один, состоящее 5 из подающих и отводящего бутылки транспортеров, расположенной между ними звездочки для ^передачи бутылок, укрепленного на ее оси кулачка и взаимодейст1вующих с ним отсека- телей, расположенных под лодающими транс- ю портер ами.Целью изобретения является возможность соединения потоков бутылок с транспортеров, ра1аположенных под углом один к другому.Для этого в (предлагаемом устройстве на is оси эвездоч1ки установлены дополиительные кулачки со смещением один относительно другого на угол а, равный углу между соседними гнездами звездочки, при этом число кулачков соответствует ч;ислу отсекателей.~ 20Кроме того, каждый из отсекателей представляет собой подпружиненный толкатель, имеющий на конце ролик для взаимодействия с копиром, а на 'пове,рхности — .кри1волиней- ный лаз, 1Предназ1нач©нный для вхождения 25 пальца, на противоположном конце которого укреплена ось с пластинами для отсечения бутылок.На фиг. 1—3 схематично изображено предлагаемое устройство для соединения двух, зотрех и четырех потоков бутылок в один, вид сверху; на фиг. 4 — разрез ло А—А на фиг. 2; на фиг. 5 — разрез по Б—Б на фиг. 4.Устройство содержит подающие 1 и отводя- щ'ий 2 бутылки транспортеры, расположенную между ними звездочку 3 для подачи бутылок, укрепленные на ее оси 4 кулачки 5 и взаимодействующие с ними отсекатели, расположенные над лодающими транспортерами.Кулачки установлены со смещением один относительно другого на угол а, равный углу между соседними гнездами звездочки 3, при этом количество кулачков соответствует числу отсекателей. На основании 6 установлены кронщтейны 7, в росточках которых размещены отсекатели.Каждый из отсекателей представляет собой подпружиненный пружиной 8 толкатель 9, имеющий на конце ролик 10 для взаимодействия с KonapOiM (на чертежах не .показан), а на поверхности — криволинейный паз 11. Последний предназначен для вхождения пальца 12, на противоположном конце которого укреплена ось 13 с пластинами 14 для отсечения бутылок.На основании б установлен также кольцевой лоток 15 с отбуртовкой 16 и привод 17.В процессе работы устройства бутылки поступают по транспортерам 1 в позиции за- прузжи. Если в момент поступления бутылок |
1972 |
- Изобретени А. А. Андрухович, В. Л. Зубатов, Ж. Г. Кан Л. Н. Ланцман
- Одесский Проектно Конструкторский Экспериментальный Филиал
|
SU422660A1 |
| КРАН ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ РАЗНОМЕРНЫХ ГРУЗОВ-•^г';; ••'•^4>&Ui:ii"-i'^T^t ;;.ix3 i w»:1Изобретение относится к подъемно-тран- сиортной технике.Известны краиы для подъема и транспортирования разномерных грузов, содержащие два механизма подъема с грузовыми подвесками, установленные на несущей платформе, перемещаемой по подкрановому пути.В известных кранах для синхронизации работы двух механизмов подъема предусмотрена электрическая связь. Поскольку эти механизмы не связаны между собой механически. они не обеспечивают четкой синхронизации работы.Цель изобретения — обеспечить более четкую синхронизацию работы механизмов иодъема.Это достигается тем, что грузовые подвески смонтированы иа концах иоворотпых стрел, каждая из которых своей средней частью посредством подшипника соединена с поворотной платформой, смонтированной па несущей платформе. Одпа из стрел на свободном конце оборудована зубчатым сектором, взаимодействующим с щестерней установленного на поворотной платформе механизма поворота этой стрелы. Последняя несет зубчатое колесо, взаимодействующее с таким же зубчатым колесом, установленным на другой стреле так, что при повороте одной стрелы вторая совершает поворот на одинаковый с первой угол, но в нротивоположную сторону.Па фиг. 1 изображен кран, общий вид; на фиг. 2 — вид ио стрелке А на фиг. 1; па фиг — 3— кран, вид сверху; на фиг. 4 — кинематическая схе^ма механнзмов новорота стрел и5 платформы; на фиг. 5 — разрез ио Б—Б на фиг. 4; на фиг. б — кннематическая схема механизма подъема.Несущая платформа 1 крана шарнирио подвешивается посредством четырех балансирных10 тележек 2 к подкрановоглу пути 3. Каждая балансирная тележка состоит из приводной 4 и холостой 5 тележек.Па иесущей платформе 1 посредством шариковых опор 6 устаиовлепа поворотная плат-15 форма 7, па которой расположепы механизмы 8 и 9 иодъема.В центре илатформы 7 посредством подшипников 10 и оси 11 иодвещепа стрела 12. Другая стрела 13 вращается отпосительно20 оси 14, также закрепленный в платформе 7 посредством подшипников 10.Осп 11 и 14 расположены па равпом расстоянии от оси платформы 7 и симметричпо по отношению к ней.25 Стрелы 12 ц 13 несут па своих концах грузовые подвески 15 с крюками 16. Стрела 12 па свободпом коице оборудована зубчатым сектором 17. Па оси стрелы 12 установлено зубчатое колесо 18, находящееся в постоян-30 ном зацемлен1П1 с таким же зубчатым колесом 19, связанным со стрелой 13. |
1972 |
|
SU420543A1 |
| АВТОМАТИЧЕСКИЙ КЛИНОРЕМЕННЫЙ ВАРИАТОР СКОРОСТИ1Изобретение относится к области машиностроения и может быть использовано в приводах машин, где требуется постоянство угловой скорости ведомого вала при уменьшении скорости приводного двигателя.5Известен автоматический клиноременный вариатор скорости, содержаш,ий вал, неподвижный и подвижный подпружиненный конусные диски и устройство с центробежными грузами для автоматического регулирования ско- 10 рости ведомого вала.Предложенный вариатор отличается тем, что центробежные грузы снабжены зубчатыми шестернями, установленными на осях, расположенных в ступице неподвижного конусного is диска. Ступица подвижного конусного диска снабжена зубчатыми рейками, взаимодейству- юш,ими с шестернями, а внутри этой ступицы расположен гидроцилиндр с поршнем, снабженным отверстиями и жестко установленным 20 на валу.Автоматический клиноремепный вариатор скорости содержит ведущий / и ведомый 2 валы, неподвижные 3 и подвижные подпружиненные 4 конусные диски, устройство с центро- зобежными грузами 5, снабженными зубчатыми шестернями 6, которые установлены на осях 7, расположенных в ступице одного неподвижного конусного диска 3.Ступица подвижного диска 4 снабжена зубчатыми рейками 8, взаимодействующими с шестернями 6, а внутри этой ступицы расположен гидроцилиндр с поршнем 9, снабженным отверстиями и жестко установленным на валу 2.Описываемый вариатор скорости работает следующим образом. При номинальной угловой скорости ведущего вала / грузы 5 находятся в горизонтальном положении, при этом обхватываемый диаметр ремня 10 ведомого вала 2 минимальный. С увеличением угловой скорости ведущего вала увеличивается скорость ведомого вала. Грузы 5 под действием центробежных сил инерции поворачиваются относительно своих осей и заставляют перемещаться подвижный диск 4, тем самым увеличивая диаметр, обхватываемый клиновым ремнем 10, и уменьшая угловую скорость ведомого вала 2. |
1973 |
- При Осевом Перемещении Диска Гидравлическа Жидкость Под Давлением Через Отверстие Поршн Перемещаетс Другую Полость, Дополнительным Сопротивлением Перемещению Подвижного Диска Что Обеспечивает Плавность Работы Описываемого
|
SU362959A1 |
| ПРИВОД ЭЛЕКТРИЧЕСКОГО КОММУТАЦИОННОГОАППАРАТА1Изобретение относится к области электрете.хи и ки, в частности к приводам ко.ммута- циовных электрических а^ипаратов, колтакты которых в крайних положениях замыкают электрические цепи.Известны приводы электрических коммута- цианных аппаратов, контакты которых в крайних положениях замыкают электрические цепи, содержащие источиик механической энергии, например электромагнит, исполнительный орга'Н, кинематическую цепь, в которую входит муфта обгона, и механизм с мертвыми положениям'и, состоящий из ведущего полноповоротного звена и ведомого звена, являющегося ко«та'ктоносителе1М.В предлагаемом приводе для повышения надежяюсти муфта обгона снабл^ена блокировкой, ф.и'ксирующей контактоноситель в каждом из крайних положений при иекотором недоходе механизма до мертвого положения. Кроме того, указа-пная блокировка выполнена в виде жестко связанной с муфтой обгона детали с двумя пазами, взаимодействующей с рычагом, жестко овязавным с зубчатым колесом (Кинематической цепи, рабочий участок которого имеет цилиндрическую поверхность.На фиг. 1 показана схематическая конструкция привода; на фиг. 2 —разрез по А-А на фиг. 1; на фиг. 3 — схема мехаинз.ма в крайних положениях контактов; на фиг. 4 —привод с кривошипно-1ползунным механизмом; на фиг. 5 — привод с кулачковым механизмом. Привод состоит из источника механической5 энергии, например электромагнита 1, исполнительный орган которого — якорь 2 через кинематическую цепь (тяга 3, рычаг 4, вал 5, зубчатое колесо 6, щестерня 7 и вал 8) соединен с шарнирным четырехзвенникол!, ойра-10 зующим механизм с мертвым'и положениями. Ве.дущее полаюповоротное звено механизма— кривошип 9 жестко связан с валом 8 и через шатун 10 соединен с ведомым его эвеном — корО'Мыслом II. Коромысло установлено не-15 нодвижно на валу 12 аппарата, который несет (является контактоносителем) подвижные контакты 13 и 14. Эти контакты в двух крайних ноложбниях через неподвижные контакты 15 и 16 замыкают электрические цепи. Меж-20 ду ведущим полноноворотным звеном механизма — кривошипом и элементом, соединенным с исполнительным органам — якорем 2, установлена муфта обгона. Последняя снабжена блокировкой, фиксирующей ведомую де-25 таль муфты относительно указанного элемента.На фнг. 1 и 2 показан пример конкретного конструктивного вьшолнбния привода. Здесь элементом, соединенным с исполнительным30 органом, является зубчатое колесо 6, от ко- |
1971 |
|
SU420001A1 |
| ПРИВОДНОЙ ГРЕЙФЕР1Изобретение относится к устройствам для захвата и подъема крупных затонувших или погруженных на большую глубину объектов.Известен лриводной грейфер, содержащий несуш,ую раму, на которой шарнирно закреплены челюсти, уп'равляемые двумя силовыми .цилиндрами.Однако известный грейф^ер не обеспечивает захвата затонувших или погруженных на болъшую глубину объектов.Цель изобретения — обеспечить захват затонувших или погруженных на большую глубину объектов.Указанная цель достигается тем, что силовые цилиндры расположены над размой, соединены шарнирами с челюстями и снабжены общим полым штоком, сообщающим между со-бой полости силовых цилиндров.Кроме того, с целью предотвращения самопроизвольного открывания челюстей на одной из них шар.нирно закреплена защелка, выполненная в виде двух 'брусьев, жестко соединенных между собой и имеющих фигурные вырезы, взаимодействующие с соответствующим пальцем шарнира другой челюсти. Для снижения зачерпывающих усилий и предотвращения образования при захвате грунтовой подушки, челюсти снабжены грун- торазмывочны.ми сопловыми насадками, соединенными с водорагапрвделительньши коллек-1015202530торами, расположенными в теле каждой челюсти.С целью передачи информации о смыкании челюстей, на брусьях защелки в районе ее фигурных вырезов усталовлены контактные датчики дистанционной сигнализации.На фиг. 1 изображен предлагаемый грейфер (В закрытом 'СОСТОЯНИИ; на фиг. 2 — то же, в раскрытом состоянии; ,на фиг. 3 •— силовой привод в разрезе; на фиг. 4 — разрез А—А на фиг. 1.Приводной грейфер состоит из рамы 1, левой 2 и правой 3 серповидных поворотных челюстей, двух силовых пневмо- или гидроцн- линдров 4 \\ 5 и общего для обоих цилиндров штока 6.Для подвода рабочей среды на цилиндре 5 предусмотрен патрубок 7. Шток 6 (фиг. 3) имеет внутренний сквозной канал для прохода рабочей среды во второй цнл'Индр 4. Поворотные челюст5! 2 и 3 установлены шарнирно на осях S и Р рамы /. Верхние концы челюстей шарнирно соединены с силовыми цилиндрами 4 и 5. На пальцах 10 шарниров челюсти 3 закреплена откидная защелка 11, выполненная в виде двух брусьев, жестко соединенных между собой. Свободные концы брусьев имеют фигурные вырезы, взаимодействующие с пальцами 12 шарниров челюсти 2. Над фи- |
1970 |
|
SU403622A1 |
| УСТАНОВКА ДЛЯ ПОДГОТОВКИ ЗАГОТОВОК СЛЮДЫ К МЕХАНИЧЕСКОЙ ОБРАБОТКЕ1Изобретение относится к области обработки и изготовления изделий из слюды.Известна установка для подготовки слюдяных подборов по шаблонам [1].Однако эта установка не дает возможности рационального раскроя изделий.Известна другая установка для подготовки заготовок слюды к механической обработке, включающая неподвижный прозрачный экран, транспортер, инструменты для резки, устройство для укладки заготовок в кассеты и привод [2].Однако данная установка дает низкую производительность.Цель изобретения — повышение производительности установки и качества заготовок.Это достигается тем, что установка снабжена дополнительными инструментами для резки, установленными с возможностью перемещения от привода, копирами, вакуум-насосом, подпружиненной штангой € прижимом и дополнительными экранами, один из которых выполнен с отверстиями и закреплен на полой оси, соединенной с вакуум-насосом и установленной вместе € подпружиненной штангой на транспортере, причем на полой оси и подпружиненной штанге смонтированы взаимодействующие с копирами рычаги.На фиг. 1 изображена предлагаемая установка, общий вид; на фиг. 2 — узел укладки заготовок слюды на экраны; на фиг. 3 — устройство для укладки заготовок в кассеты; на 5 фиг. 4 — последовательные положения экранов.Установка включает транспортер 1, управляемый с пульта 2. На приводном валу 3 транспортера жестко насажены кулачки 4, уп- 10 равляющие контактами 5. Цепь 6 транспортера несет основание 7.Установка содержит также неподвил^ный прозрачный экран 8, дополнительный экран15 9, выполненный с отверстиями, и дополнительный экран 10, смонтированный на оси И, который прижимается к экранам 8 и 9 пружиной 12. Вдоль транспортера I установлены в тех-20 нологической последовательности инструменты 13 для резки, дополнительные инструменты 14 для резки, установленные с возможностью перемещения в перпендикулярном движению заготовок направлении от привода,25 инструмент 15 для распушки, направляющая 16 и копиры 17, 18, 19 и 20. У конца транспортера 1 смонтирована течка 21 и устройство для укладки заготовок в кассеты в виде транспортера 22 и расположенных вдоль него кас-30 сет 23 с подвижными днищами 24. |
1971 |
- Изобретени Б. А. Златкин В. С. Манухин
|
SU428947A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ КРЫЛЬЧАТЫХ ДВИЖИТЕЛЕЙИзвеетиы стенды для испытания крыльча- тых движителей, включающие погруженную в воду платформу с установленным иа не.й движителем, приводимым через механическую передачу от двигателя, установленного на фуи- 5 даменте.Особенностью описываемого движителя является то, что платформа выполнена с двумя горизонтальными цапфами, одна из которых снабжена двуплечим рычагом, концы которо- ю го взаимодействуют с силоизмерителями, укрепленными на фундаменте. Эта цапфа поворотно смонтирована в подшипнике ползуна, который взаимодействует с двумя другими силоизмерителями, нрикренленными к фунда- is менту. Ползун может поворачиваться вокруг оси вертикальной цапфы, поворотно смонтированной в установленном на фундаменте подшипнике и совмешенной с подшипником другой горизонтальной цапфы.20Такое выполнение стенда позволяет определять упор и крутяш,ий момент, развиваемый движителем.С целью обеспечения условий притекания воды к двил<:ителю, близких к натурным, в 25 днище нлатформы установлены наделки, выполненные но форме подводной части судна.Кроме того, стенд отличается выиолнением механической передачи с шарнирными муфтами, что позволяет нроизводить испытание дви- 30 жителей различных типоразмеров.На фиг. 1 изображен предлагаемый стенд с приводным двигателем; на фиг. 2 — стенд, поперечный разрез; на фиг. 3 — то же, вид сверху; на фиг. 4 — силоизмерительная схема стенда.На платформе /, погрул^енной в воду, установлен испытуемый двил<итель 2, приводимый от двигателя 3, установленного на фундаменте, через валопровод 4, шарнирную муфту 5 и редуктор 6. На валопроводе имеется торсиометр 7. В днище платформы установлены наделки 8, выполненные по форме подводной части судпа. Платформа снабл^ена двумя горизонтальными цапфами 9, смонтированными в гидростатических подшипниках 10 п 11. Одна из цапф снабжена двупле- чнм рычагом 12, который взаимодействует с силоизмерителями 13, установленными иа фундаменте. Ползун 14 илатформы, перемещающийся иа подшипниках 15, взанмодейст- вует с сплоизмерителями 16, также установленными на фундаменте. Подшипник 11 снабл<ен вертнкальной цанфой 17, смонтированной в подшипнике 18, укрепленном на фундаменте.Стенд работает следующим образом.Движитель, приводимый во вращение от двигателя, создает упор, которьп"! преобразуется в крутящий момент относительно осей горизог1тальных цап(|) и величину которого измеряют с помон;ью силопзмерителей 13. Кро- |
1965 |
|
SU176812A1 |
| ОПТИЧЕСКОЕ СКАНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ КСЕРОГРАФИЧЕСКИХ АППАРАТОВ12Изобретение относится к копировальной ным профилированным кулачком, связанным технике, в частности к оптическому сканиру- с кареткой источника света для обеспечения ющему устройству для ксерографических ап- передвижения каретки по заданной траекто- паратов, где световое изображение оригинала рии с постоянной скоростью в направлении создается на подвижном фоточувствительном 5 сканирования и со скоростью, более высокой, элементе для получения скрытого электроста-в обратном направлении.тического изображения 'на нем. Скрытое изо-Для связи Л'1ежду к^'лачком и кареткой набражение ксерографическим путем проявляет- последней закреплен подшипник скольжения, ся и закрепляется на подложке для образова-взаимодействующий с кулачком, а также имения копии оригинала. Для получения изобра- 10 ется толкатель кулачка, закрепленный на ка- жения оригинала на подвижном фоточувстви- ретке и проходящий через подшипник до за- тельном элементе используют подвижную оп- цепления с рабочей поверхностью кулачка, тическую сканирующую систему.Кулачок и подшипник выполнены из пластика.Известное подвижное оптическое сканирую- имеющего низкий коэффициент трения. Карет- щее устройство содержит источник света, оп- 15 ка расположена перпендикулярно оси кулач- тическую систему, индивидуальные каретки ка. На каретке установлен противовес для ее источника света и оптической системы, кото-уравновешивания.рые установлены с возможностью совместногоНа фиг. 1 изображено оптическое сканиру-движения для сканирования оригинала, под- ющее устройство, вид сбоку; па фиг. 2 — источ- лежащего копированию, и оборудованы пру- 20 ник света с кареткой и приводом; на фиг. 3 — жинными возвратными средствами.оптическое сканирующее устройство, вид сверху; на фиг. 4 — каретка оптической системы; на фиг. 5 — оптическая система с приводом, вид сбоку; на фиг. 6 — оптическая система, 25 вид сверху; па фиг. 7 и 8 — заслонка оптической системы с приводом.Оптическое сканирующее устройство, используемое для проектирования светового изображения неподвижного орнгииала 1 на фото-Недостатком известного устройства является неравномерное освещение участков объекта при сравнительно высоких скоростях действия ксерографического аппарата.Для устранения этого недостатка и обеспечения равномерного освещения оригинала н ускоренного возврата источника света в исходное положение предлагаемое оптическоесканирующее устройство снабжено привод- 30 чувствительную поверхность вращающегося |
1970 |
|
SU414817A1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР СКОРОСТИ1Изобретение относится к регулируемым механическим ;переда1чам импульсного действ.ия и .может 'Найти .применение в приводах различного 'Назначения, например в приводах машин по переработке пластмасс и резины.Известны импульсные вар.иаторы скорости, содержащие корпус и расположенные в нем ведущий и ведомый .валы, преобразующий механизм в .в.иде кривошилно-щатунного механизма, муфты свободного хода .и механизм регулирования.Недостатками известного вариатора являются громоздкость конструкции и невозможность .получения оптимального закона движе- ;Ния .ведомого звена.С целью уорощевия .конструкции и получения оптимального значения закона движен.ия ведомого звена, .ка.ждый преобразующий механизм выполнен в виде яространственного коромыслового кулаЧ'Ко.вого механиз-ма, включающего ролики, установленные равномерно .по окружности на наружной обойме соответствующей муфты овобо.дного хода, и винтовой кулачок, взаимодействующий с корпусом .и рол.иками.На фиг. 1 представлен импульсный вариатор скорости, общий вид; на фиг. 2 — то же, раз.рез по А—А .на фиг. 1; на фиг. 3 — график .изменения передаточного отнощения от ведомой обоймы муфты свободного хода к веду-2iБ П Т БФШ!Д енооЕРтевщему валу вариатора в зависимости от угла ф поворота последнего а 15° и у 60°; на фиг. 4— график изменения передаточного отнощения вариатора от ведомого .вала к его ведущему5 в за.висимости от угла ф поворота пос.леднего при а 15° и Y 60°.Вариатор .имеет ведущ.ий вал 1, установленный соосно с ведомым .валом 2 на .подшипниках в корпусе 3, и диск 4, щарнирно соеди-10 ненный в центре с ведущим валом 1, щтоки 5 с разными длинами и равными масса.м.и, рав аомерно расположенными относительно оси ведомого вала 2 цилиндрической поверхности и установленными подвижно в .корпусе 3. При15 это'М свободные концы щтоков 5, выходящие к диску 4, взаимодействуют с .последним, например через гидростатические опоры скольжения (или подшипник качения). Другие концы щтоков 5 скреплены с винтовыми кулачка-20 .ми 6, каждый из которых своей плоской поверхностью взаимодействует с корпусом 3 через цикл.ичеокий ролик 7 с неподвижной осью вращения, а винтовой поверхностью — с наружной обоймой 8 муфты свободного хода че-25 рез цилиндрический ролик 9, ось вращения которого скреплена с обоймой 8 муфты свободного хода. Ступицы 10 муфты свободного хода скреплены с .ведомЫ'М валом 2, а их обоймы 8 подпружинены относительно корпу-30 са 3 в круговом направлении, например .пру- |
1972 |
- Изобретени М. Д. Фурасов А. П. Чист Ков
|
SU420832A1 |
| ЧЕЛЮСТНОЙ ТРАКТОРНЫЙ ПОГРУЗЧИКИзвестны челюстные тракторные погрузчики для погрузки длинномерных лесоматериалов на транспортное средство, содержаш.ие раму, выполненную поворотной в вертикальной нлоскости с помощью гидроцилипдров, и захватный орган, приводимый от гидроцилиндров, расположенных на поворотной раме.Предлагаемый челюстной тракторный погрузчик отличается тем, что штоки одной пары гидропилиндров 'Поворота рамы, размещенных ло бортам погрузчика, шарнирно соединены с другой парой цилиндров посредством поворотных относительно оси рамы Т-образных коромысел.Такой погрузчик грузит длинномерные лесоматериалы без разворота корпуса путем переноса пачки лесоматериала через кабину трактора, что повышает эффективность его работы.Для сохранения постоянного усилия зажатия груза в захватном органе при его перемещении штоки гидроцилиндров захватного органа связаны роликовой цепью со звездочками поворота нижней челюсти. Роликовая цепь заключена в жесткие направляющие, которые предотвращают ее излом в шарнирах при выталкивании штока.кгссоюзпляПАТОГи;о>&TEXiitfVfci:!'^' Ri'fi 'rt-nr -.-.f,1111на поворотной раке. Эти стойки выполняют роль второй неподвижной челюсти при замкнутом зеве захвата. На чертеже предлагаемый погрузчик изо-5 бражен схематически.Неподвижная рама / жестко связана с корпусом заднего моста трактора. К ней шарнирно присоединена рама 2, которая может поворачиваться в вертикальной плоскости от10 двух пар гидроцилиндров 3 и 4, шариирно связанных с коромыслами 5 Т-образной формы.На валу 6 рамы 2 жестко закреплена нижняя челюсть 7, состоящая из двух частей,15 концы которых связаны поперечной балкой 8.Верхняя челюсть захватного органа представляет собой жестко закрепленные на поворотной раме 2 стойки 9. Но концам вала20 закреплены звездочки 10, охватываемые роликовой цепью //. Одни концы цени закреплены на звездочках, а другие связаны со штоками 12 гидроцилиндров 13, располол<енных на раме 2.25 Излому реек в щарнирах 14 при работе на сжатие препятствуют жесткие направляющие 15. |
1965 |
- О. А. Стефанов, В. А. Давыденко, И. Созинов Ф. Полетайкин
|
SU173654A1 |