Изобретение относится к судовым движителям с колеблющимся рабочим органом в виде прямоугольного или стреловидного крыла и предназначено для увеличения средней за период колебания тяги движителя.
Известно устройство для водного транспортного средства, содержащее приводной рычаг, совершающий угловые колебания, на конце которого шарнирно закреплено крыло с гибкой пластиной, причем на рычаге и на крыле установлены два двуплечих рычага, соединенных пружинами, что позволяет крылу совершать под действием гидродинамических сил угловые колебания относительно приводного рычага, при этом комплекс крыло-пластина меняет свою кривизну.
Известно, что улучшить гидродинамические характеристики крыла можно, изменяя кривизну профиля крыла, в частности, используя механизацию крыла, например отклоняемые предкрылки и закрылки.
В известном устройстве происходит изменение кривизны профиля за счет изгиба пластины под действием набегающего потока, что приводит к уменьшению гидродинамического качества профиля и снижению величины тяги движителя.
Установка на жестком крыле с симметричным профилем закрылка имеющего возможность отклоняться в ту или иную сторону, изменяя таким образом кривизну профиля, позволяет существенно улучшить гидродинамические характеристики профиля крыла. Так, для углов атаки профиля 5- 15° отклонение закрылка на 10-20° дает за счет изменения кривизны профиля увеличение коэффициента подъемной силы крыла Су в 2 раза при № 5° и 1,2-1,5 раза при .
Цель изобретения - повышение эффективности работы плавникового движителя путем обеспечения возможности управления поворотом закрылка, установленного на колеблющемся крыле, в течение периода колебания крыла.
Поставленная цель достигается тем, что на приводном рычаге плавникового движителя, на конце которого упруго закреплено с возможностью ограниченного поворота жесткое крыло симметричного профиля с поворотным закрылком, и на закрылке установлены два двуплечих рычага, один из которых установлен на приводном рычаге так, что его плечи перпендикулярны оси поворота жесткого крыла, а второй - на поворотном закрылке также таким образом, что
плечи рычага перпендикулярны оси поворота закрылка, при этом движитель снабжен двумя тягами, которые шарнирно связаны с концами обеих двуплечих рычагов с образованием шарнирного параллелограмма.
Предлагаемое устройство отличается от известного тем, что, кроме одного двуплечего рычага на приводном рычаге движителя на жестком закрылке установлен второй
двуплечий рычаг так, что его плечи перпендикулярны оси поворота закрылка, а движитель снабжен также двумя тягами, которые шарнирно связаны с концами обеих двуплечих рычагов с образованием шарнирного
параллелограмма, что позволяет при повороте крыла относительно приводного рычага на какой-то угол автоматически производить отклонение на такой же угол, но в противоположную сторону, закрылка
относительно крыла.
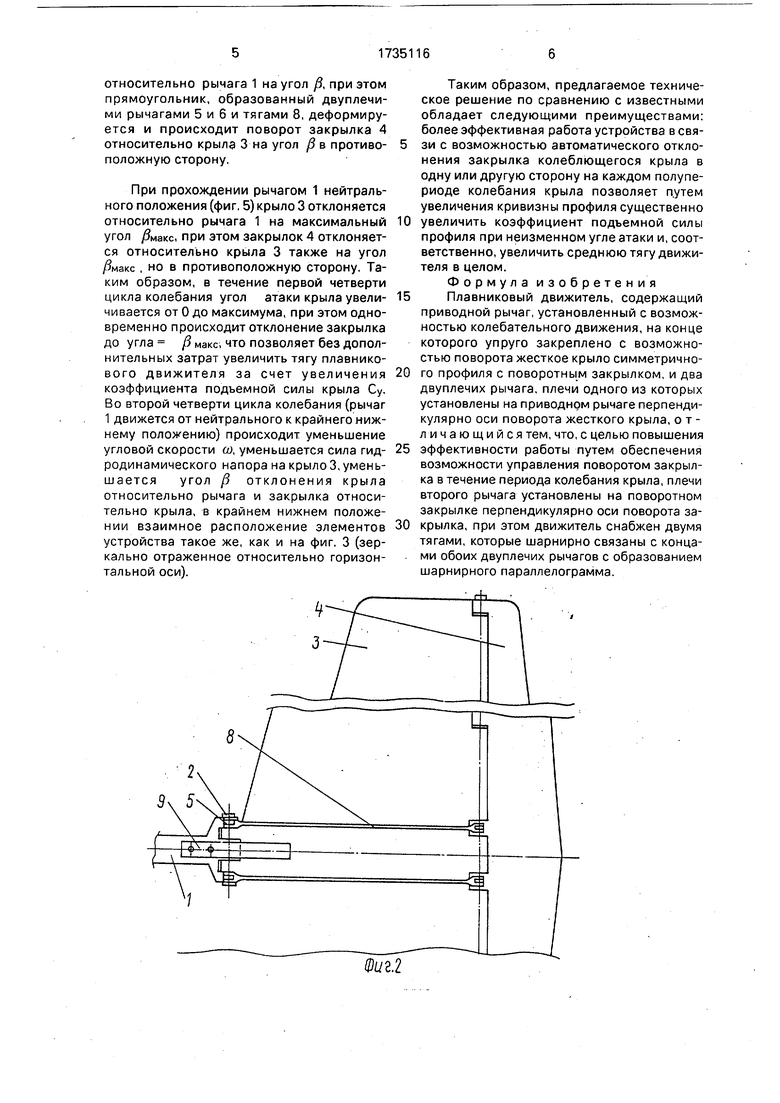
На фиг. 1 показано расположение деталей устройства в нейтральном положении, когда оси приводного рычага, крыла и закрылка лежат на одной прямой; на фиг. 2 плавниковый движитель; на фиг. 3 -5 - расположение деталей устройства в начале, посредине полупериода и в промежуточном между ними положении в течение одного полупериода колебания крыла.
Плавниковый движитель состоит из
приводного рычага 1, к которому через ось 2 шарнирно подсоединено крыло 3 с закрылком 4 .На рычаге 1 и закрылке 4 перпендикулярно их продольным осям и
осям вращения размещены двуплечие рычаги 5 и 6, которые посредством шарниров 7 соединены параллельными тягами 8 Крыло 3 с обеих сторон поджато двумя плоскими пружинами 9 неподвижно
закрепленными на рычаге 1.
Плавниковый движитель работает следующим образом.
Приводной рычаг 1 совершает угловые колебания таким образом, что ось 2 совершает возвратно-поступательные гармонические колебания в вертикальной плоскости. Рычаг 1 (фиг 3) находится в крайнем верхнем положении и начинает двигаться вниз, при этом сила гидродинамического напора в вертикальной плоскости практически отсутствует, крыло 3 и закрылок 4 находятся на одной оси с рычагом 1, параллелограмм, образованный двуплечими рычагами 5 и 6 и тягами 8 имеет форму
прямоугольника.
При движении крыла вниз (фиг. 4) со все большей поперечной скоростью (угловая скорость а) стремится к а; макс) сила гидродинамического напора отклоняет крыло 3
относительно рычага 1 на угол Д при этом прямоугольник, образованный двуплечими рычагами 5 и 6 и тягами 8, деформируется и происходит поворот закрылка 4 относительно крыла 3 на угол / в противоположную сторону.
При прохождении рычагом 1 нейтрального положения (фиг, 5) крыло 3 отклоняется относительно рычага 1 на максимальный угол /Змакс, при этом закрылок 4 отклоняется относительно крыла 3 также на угол , но в противоположную сторону. Та- ким образом, в течение первой четверти цикла колебания угол атаки крыла увеличивается от 0 до максимума, при этом одновременно происходит отклонение закрылка до угла /3 макс, что позволяет без дополнительных затрат увеличить тягу плавникового движителя за счет увеличения коэффициента подъемной силы крыла Су. Во второй четверти цикла колебания (рычаг 1 движется от нейтрального к крайнего нижнему положению) происходит уменьшение угловой скорости а), уменьшается сила гидродинамического напора на крыло 3, умень- шается угол ft отклонения крыла относительно рычага и закрылка относительно крыла, в крайнем нижнем положении взаимное расположение элементов устройства такое же, как и на фиг. 3 (зеркально отраженное относительно горизонтальной оси).
Таким образом, предлагаемое техническое решение по сравнению с известными обладает следующими преимуществами: более эффективная работа устройства всвязи с возможностью автоматического отклонения закрылка колеблющегося крыла в одну или другую сторону на каждом полупериоде колебания крыла позволяет путем увеличения кривизны профиля существенно
увеличить коэффициент подъемной силы профиля при неизменном угле атаки и, соответственно, увеличить среднюю тягу движителя в целом.
Формула изобретения
Плавниковый движитель, содержащий приводной рычаг, установленный с возможностью колебательного движения, на конце которого упруго закреплено с возможностью поворота жесткое крыло симметричного профиля с поворотным закрылком, и два двуплечих рычага, плечи одного из которых установлены на приводном рычаге перпендикулярно оси поворота жесткого крыла, отличающийся тем, что, с целью повышения
эффективности работы путем обеспечения возможности управления поворотом закрылка в течение периода колебания крыла, плечи второго рычага установлены на поворотном закрылке перпендикулярно оси поворота закрылка, при этом движитель снабжен двумя тягами, которые шарнирно связаны с концами обоих двуплечих рычагов с образованием шарнирного параллелограмма.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ | 1992 |
|
RU2068372C1 |
| ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ | 1990 |
|
RU2025405C1 |
| Самостабилизирующийся лопастной движитель | 2022 |
|
RU2798298C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ ПЕРЕМЕЩЕНИЕ КРЫЛА И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2141058C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ КРЫЛА И УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1996 |
|
RU2157919C2 |
| КРЫЛО (ЛОПАСТЬ) С САМОУСТАНОВКОЙ УГЛА АТАКИ К НАПРАВЛЕНИЮ НАБЕГАЮЩЕГО ПОТОКА СРЕДЫ | 1998 |
|
RU2141059C1 |
| ЛОПАСТЬ НЕСУЩЕГО ВИНТА ВЕРТОЛЁТА С ОТКЛОНЯЕМОЙ ЗАДНЕЙ КРОМКОЙ | 2015 |
|
RU2603707C1 |
| Лопасть несущего винта вертолета | 2017 |
|
RU2662591C1 |
| Способ работы крыльчатого движителя и устройство для его осуществления | 2019 |
|
RU2720699C1 |
| Плавниковый движитель для лодок | 1976 |
|
SU796074A1 |


Фиг.2
Jrmn
max
ФигЛ
Фиг. 5
