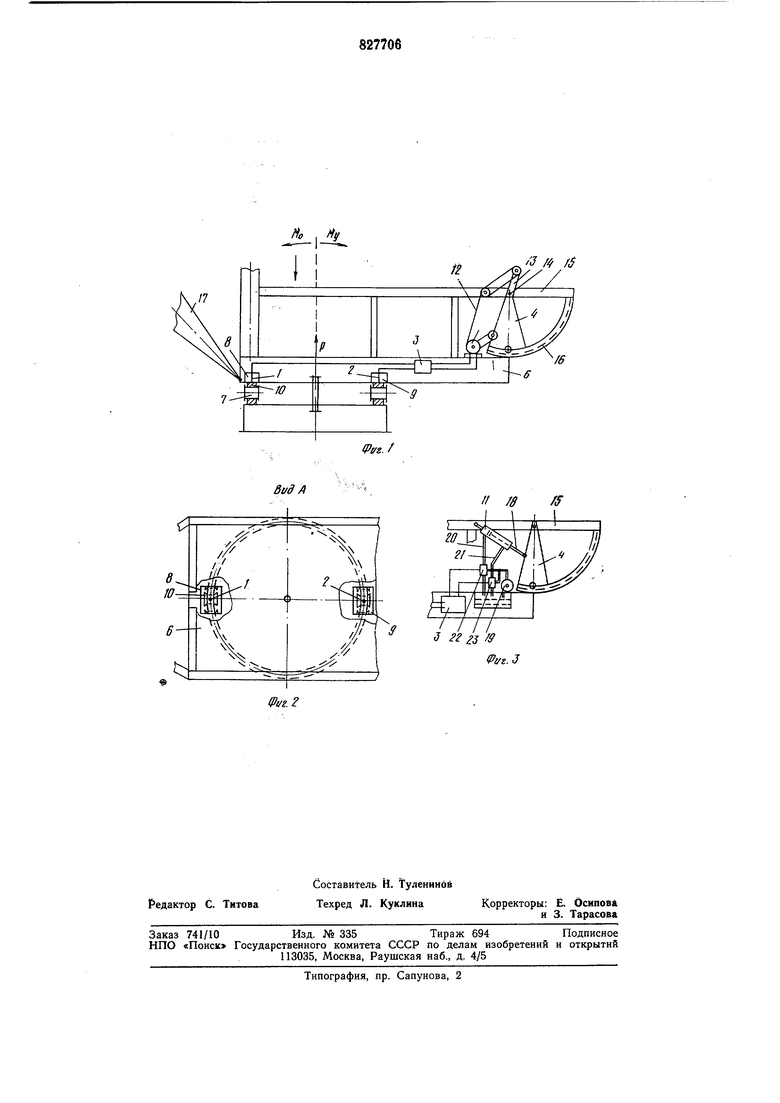
Изобретение относится к средствам для уравновешивания землеройной машины. Известен противовес землеройной машины, предназначенный для придания машине уравновешенности и устойчивости, выполненный в виде тележки, расположенной на поворотной части машины 1. В этом противовесе повышение уравновешенности поворотной части достигается перемещением противовеса в управляемом ре жиме и зависит от сопротивления разрабатываемой породы на рабочем органе машины. Этот противовес обеспечивает приблизительное соотношение моментов, действующих на машину. Наиболее близким к изобретению техническим решением является устройство для уравновешивания землеройной машины, содержащее противовес, установленный на поворотной платформе, опирающейся на опорно-поворотный круг машины, и привод поворота противовеса 2. Это устройство не обеспечивает заданной точности уравновешивания в динамическом режиме, что связано с увеличением массы противовеса. Цель изобретения - повыщение точности уравновешивания землеройной машины и снижение массы противовеса. ;Эта цель достигается тем, что устройство для уравновешивания землеройной машины, содержащее противовес, установленный на поворотной платформе, опирающейся на опорно-поворотный круг машины, и привод поворота противовеса, снабжено установленными между поворотной платформой и опорно-поворотным кругом датчиками и соединенными с ними блоком управления, связанным с приводом поворота противовеса, причем датчики расположены на продольной оси платформы. На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - вид А фиг. 1; на фиг. 3 - вариант устройства с гидравлическим механизмом перемещения плиты противовеса. Устройство содержит датчики нагрузки 1 и 2, блок управления 3, противовес 4 и лебедку 5, размещенную на поворотной платформе 6. Платформа опирается на опорноповоротный круг 7, установленный на неподвижной части машины. Тензометрические датчики нагрузки 1 и 2 размещены в переднем и заднем проемах 8 и 9 нижнего листа поворотной платформы 6 по продольной оси платформы 6 так, что датчик 1 отнесен от датчика 2 на 180° по окружности опорно-поворотного круга 7.
Датчики 1 и 2 установлены с еозцожир стью взаимодействия с ооорвим ре ьсфвым кругом 10 и подключены к самонастраивающемуся блоку управления 3 с збтомзтнческим поиском иаибольшего или наименьшего значения величины нагрузки на рельсовом круге.
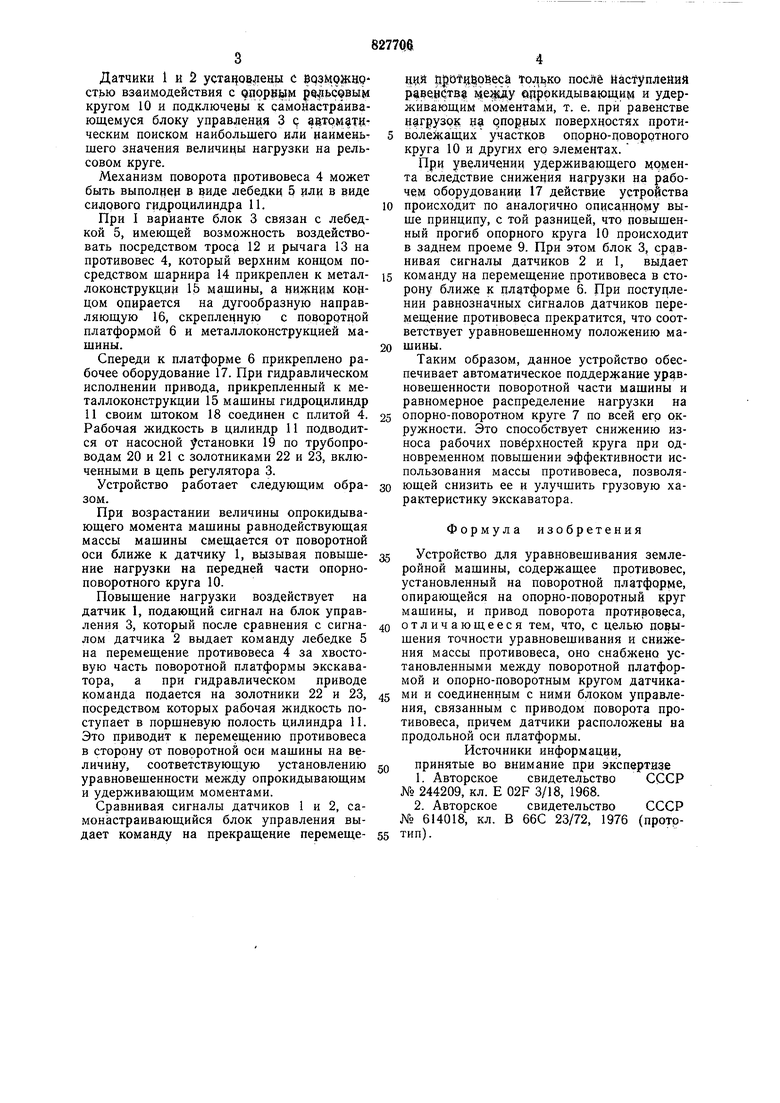
Механизм поворота противовеса 4 может быть выполнен в виде лебедки 5 или в виде силового гидроцилиндра 11.
При I варианте блок 3 связан с лебедкой 5, имеющей возможность воздействовать посредством троса 12 и рычага 13 иа противовес 4, который верхним концом посредством щарнира 14 прикреплен к металлоконструкции 15 мащины, а нижним концом опирается на дугообразную направляющую 16, скрепленную с поворотной платформой 6 и металлоконструкцией мащины.
Спереди к платформе 6 прикреплено рабочее оборудование 17. При гидравлическом исполнении привода, прикрепленный к металлоконструкции 15 машины гидроцилиндр 11 своим штоком 18 соединен с плитой 4. Рабочая жидкость в цилиндр 11 подводится от насосной установки 19 по трубопроводам 20 и 21 с золотниками 22 и 23, включеиными в цепь регулятора 3.
Устройство работает следующим образом.
При возрастании величины опрокидывающего момента машины равнодействующая массы мащины смещается от поворотной оси ближе к датчику 1, вызывая повышение нагрузки на передней части опорноповоротного круга 10.
Повышение нагрузки воздействует на датчик 1, подающий сигнал на блок управления 3, который после сравнения с сигналом датчика 2 выдает команду лебедке 5 на перемещение противовеса 4 за хвостовую часть поворотной платформы экскаватора, а при гидравлическом приводе команда подается на золотники 22 и 23, посредством которых рабочая жидкость поступает в поршневую полость цилиндра 11. Это приводит к перемещению противовеса в сторону от поворотной оси машины на величину, соответствующую установлению уравновешенности между опрокидывающим и удерживающим моментами.
Сравнивая сигналы датчиков 1 и 2, самонастраивающийся блок управления выдает команду на прекращение перемещений проТйбОйеса после йаступлейия равевСтв| Цещу едрркидывакэщим и удерживающим моментами, т. е. при равенстве нагрузок н дпорных поверхностях противолёжащих участков оцорно-поворотного круга 10 и других его элементах.
При увеличении удерживающего момента вследствие снижения нагрузки на рабочем оборудовании 17 действие устройства
происходит по аналогично описанному выше принципу, с той разницей, что повышенный прогиб опорного круга 10 происходит в заднем проеме 9. При этом блок 3, сравнивая сигналы датчиков 2 и 1, выдает
команду на перемещение противовеса в сторону ближе к платформе 6. При поступлении равнозначных сигналов датчиков перемещение противовеса прекратится, что соответствует уравновещенному положению машины.
Таким образом, данное устройство обеспечивает автоматическое поддержание уравновешенности поворотной части машины и равномерное распределение нагрузки на
опорно-поворотном круге 7 по всей его окружности. Это способствует снижению износа рабочих поверхностей круга при одновременном повышении эффективности использования массы противовеса, позволяющей снизить ее и улучшить грузовую характеристику экскаватора.
Формула изобретения
Устройство для уравновешивания землеройной машины, содержащее противовес, установленный на поворотной платформе, опирающейся на опорно-поворотный круг машины, и привод поворота противовеса,
отличающееся тем, что, с целью повышения точности уравновешивания и снижения массы противовеса, оно снабжено установленными между поворотной платформой и опорно-поворотным кругом датчиками и соединенным с ними блоком управления, связанным с приводом поворота противовеса, причем датчики расположены на продольной оси платформы.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 244209, кл. Е 02F 3/18, 1968.
2.Авторское свидетельство СССР № 614018, кл. В 66С 23/72, 1976 (протртип).
Но . f
Вид А
3 / /$
f6
II /8
J 2 г гз 9
Pi/z.3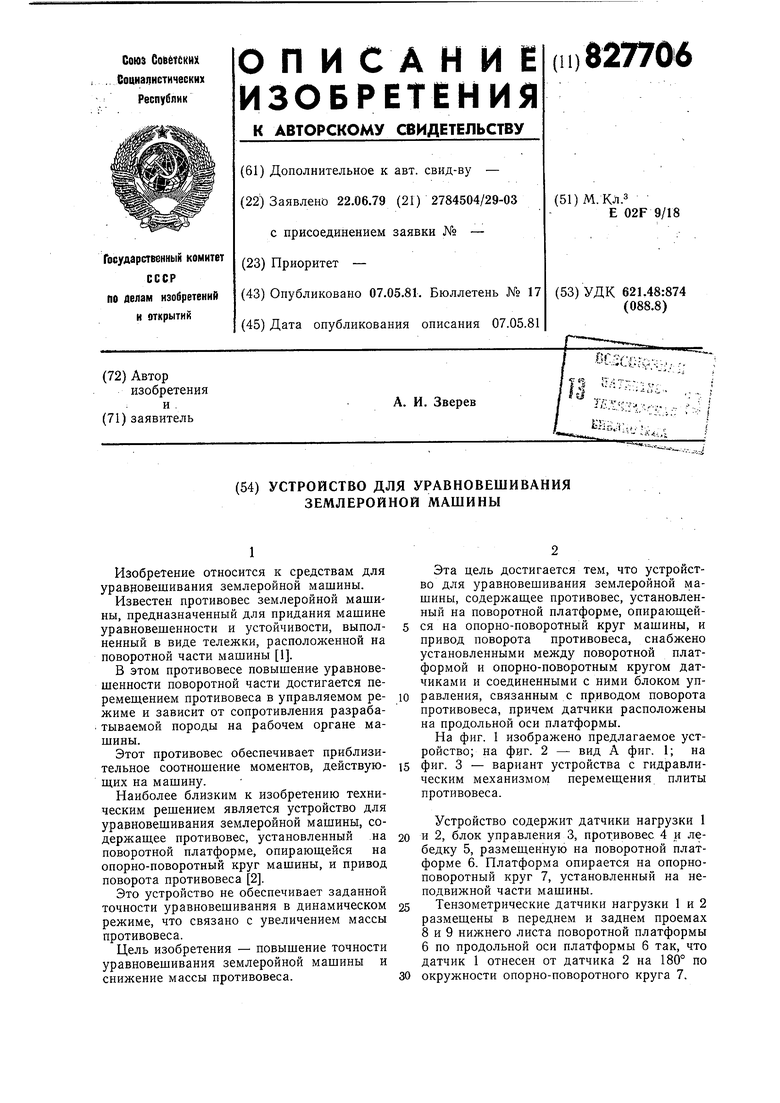
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для уравновешивания поворотной платформы экскаватора | 1987 |
|
SU1567730A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |
| Гидравлический одноковшовый экскаватор | 1979 |
|
SU823503A1 |
| ПЛАВУЧИЙ ПОДЪЕМНЫЙ КРАН БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2003 |
|
RU2258026C2 |
| ПЛАВУЧЕЕ ПОДЪЕМНОЕ СРЕДСТВО | 2009 |
|
RU2406681C1 |
| Роторный экскаватор | 1987 |
|
SU1530678A1 |
| Шагающее ходовое оборудование | 1979 |
|
SU899801A1 |
| Гидравлический привод механизма шагания экскаватора | 1983 |
|
SU1135861A1 |
| Экскаватор | 1990 |
|
SU1735511A1 |
| ПЛАВУЧЕЕ ПОДЪЕМНОЕ СРЕДСТВО БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2006 |
|
RU2320529C1 |