Изобретение относится к судовождению на внутренних водных путях
Известны толкаемые секционные сое .тавы с автоматической или полуавтоматической сцепкой барж (секций), оснащенные мощными кормо- выми движительно-рулевыми комплексами (ДРК).
Недостатком вождения таких составов является их низкая управляемость и как следствие повышенные требования к габаритам пути„
Наиболее близким к предлагаемому является способ вождения изгибаемых толкаемых составов с активными подруливающими устройствами на носовой секции. Управляя одновременно кормовыми и носовыми ДРК, а также принудительно-изгибающими устройствами, можно осуществлять сложные маневры при прохождении извилистого фарвате- р ач
Недостатком этого способа является сложность управления, так как кроме воздействия на кормовые и носовые ДРК судоводителю приходится одновременно управлять изгибающим устройст™ вом (устройствами)„ В условиях изви- . листого фарватера это вызывает неизбежные ошибки управления в наиболее ответственные моменты проводки, чт-о ограничивает число секций изгибаемого состава до минимума (две секции). Сложность управления не позволяет реализовать многозвенные изгибаемые секционные составы (МИСС) с числом секций более двух,,
Цель изобретения - улучшение управляемости МИСС.
Эта цель достигается тем, что согласно способу вождения многозвенного изгибаемого секционного состава создают тянущее усилие вперед по курсу, кроме того, дополнительно создают тянущее усилие назад с силой до 0,1 - 0,3 от силы тянущего усилия вперед..
Несмотря на затраты мощности в режиме торможения кормовой секции, общее сопротивление состава уменьшается, что обеспечивает прибавку скорости или повышения грузоподъемности состава без увеличения его энерговорйуженО О 00 4 ГО
ности. Это происходит по двум причи- намо Во-первых, носовые движители работают во встречном потоке с более вы-1 соким КПДс Во-вторых, постоянное рас- тягвающее напряжение в составе придает ему упругие свойства, что способствует возникновению в составе колебательного движения, задаваемого носовой секцией„ Возникает эффект бегущей волны, когда каждая последующая секция строго повторяет движение предыдущей, в результате чего все секции состава находятся в попутном потоке, вызванном носовой секцией Наличие реверсивной тяги кормовых ДРК позволяет легко управлять кормовой секцией, предупреждая раскат состава, так как в этом случае вся кормовая секция становится рулем состава При этом исключается необходимость принудительно изгибаемого состава, секции надежно соединяться простейшими ш рнирными сцепами, а число секций может быть сущесвенно увеличено без усложнения управлением состава. На прямых участках растяжка состава исключает его рыскливость, что способствует сни жению сопротивления.
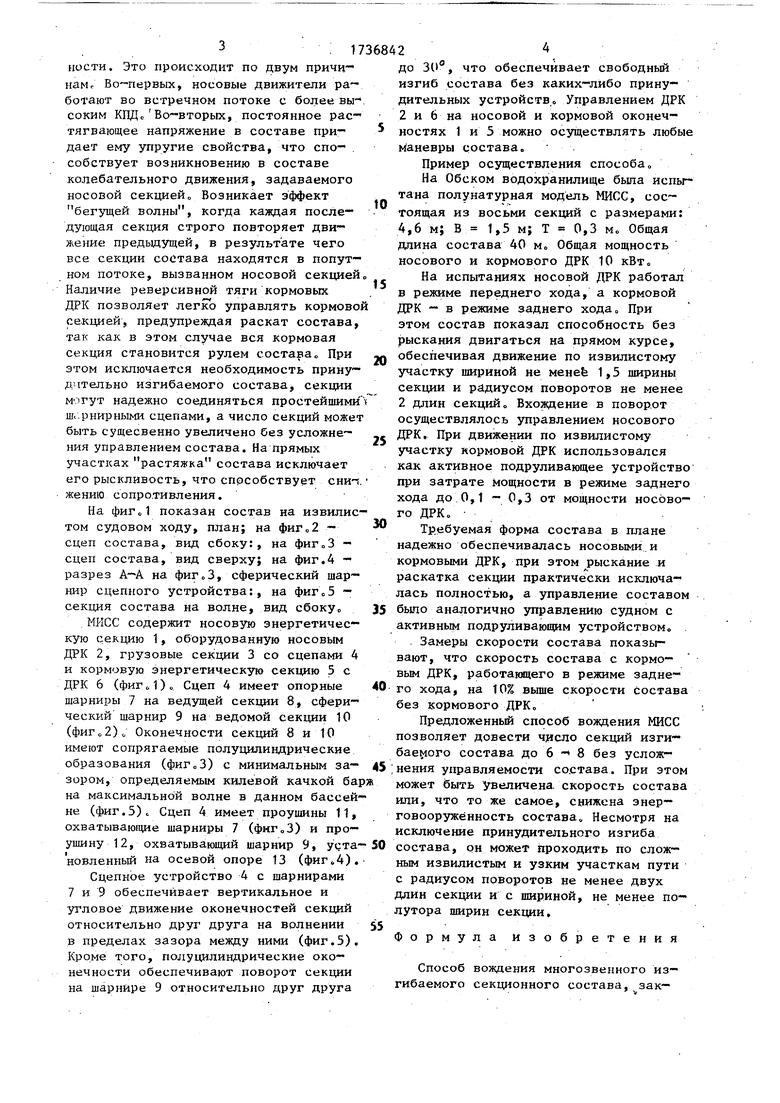
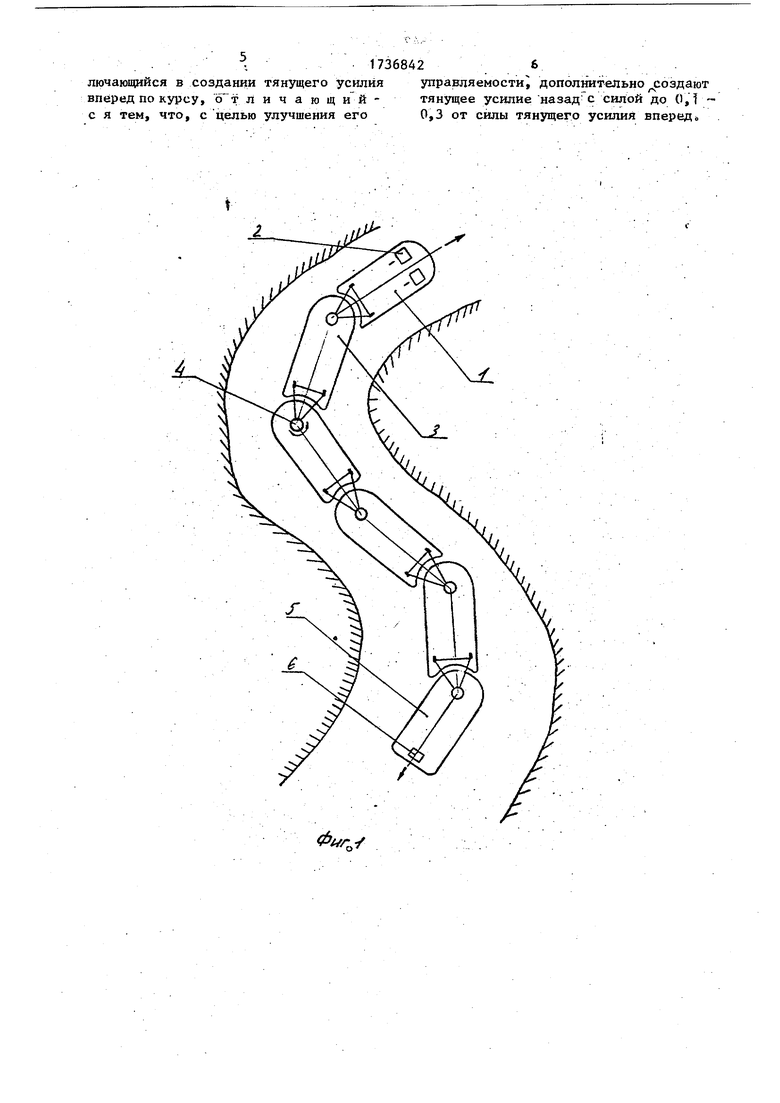
На фиг01 показан состав на извилистом судовом ходу, план; на фиг„2 - сцеп состава, вид сбоку:, на фиг,3 - сцен состава, вид сверху; на фиг.4 - разрез А-А на фиг„3, сферический шарнир сцепного устройства:, на фиг„5 - секция состава на волне, вид сбоку
МИСС содержит носовую энергетичес- кую секцию 1, оборудованную носовым ДРК 2, грузовые секции 3 со сцепами 4 и кормовую энергетическую секцию 5 с ДРК 6 (фиг с. 1) о Сцеп 4 имеет опорные шарниры 7 на ведущей секции 8, сферический шарнир 9 на ведомой секции 10 (фиг о 2)„ Оконечности секций 8 и 10 имеют сопрягаемые полуцилиндрические образования (фиг„3) с минимальным за- зором, определяемым килевой качкой бар на максимальной волне в данном бассейне (фиг.5)с Сцеп 4 имеет проушины 11, охватывающие шарниры 7 (фнг„3) и проушину 12, охватывающий шарнир 9, уста- новленный на осевой опоре 13 (фиг.4).
Сцепное устройство 4 с шарнирами 7 и 9 обеспечивает вертикальное и угловое движение оконечностей секций относительно друг друга на волнении в пределах зазора между ними (фиг.5). Кроме того, полуцилиндрические оконечности обеспечивают поворот секции на шарнире 9 относительно друг друга
5
0
5
5
0 5 0
5
до 3( °, что обеспечивает свободный изгиб состава без каких-либо принудительных устройств., Управлением ДРК 2 и 6 на носовой и кормовой оконечностях 1 и 5 можно осуществлять любые маневры состава.
Пример осуществления способа
На Обском водохранилище была испытана полунатурная модель МИСС, состоящая из восьми секций с размерами: 4,6 м; В 1,5 м; Т 0,3 м. Общая длина состава 40 м« Общая мощность носового и кормового ДРК 10 кВт о
На испытаниях носовой ДРК работал в режиме переднего хода, а кормовой ДРК - в режиме заднего хода При этом состав показал способность без рыскания двигаться на прямом курсе, обеспечивая движение по извилистому участку шириной не менее 1,5 ширины секции и радиусом поворотов не менее 2 длин секций. Вхождение в поворот осуществлялось управлением носового ДРК. При движении по извилистому участку кормовой ДРК использовался как активное подруливающее устройство при затрате мощности в режиме заднего хода до 0,1 - 0,3 от мощности носового ДРК,
Требуемая форма состава в плане надежно обеспечивалась носовыми и кормовыми ДРК, при этом рыскание и раскатка секции практически исключалась полностью, а управление составом было аналогично управлению судном с активным подруливающим устройством
Замеры скорости состава показывают, что скорость состава с кормовым ДРК, работающего в режиме заднего хода, на 10% выше скорости состава без кормового ДРК„
Предложенный способ вождения МИСС позволяет довести число секций изгибаемого состава до 6 - 8 без усложнения управляемости состава. При этом может быть увеличена скорость состава или, что то же самое, снижена энерговооруженность состава,, Несмотря на исключение принудительного изгиба состава, он может проходить по сложным извилистым и узким участкам пути с радиусом поворотов не менее двух длин секции и с шириной, не менее полутора ширин секции.
Формула изобретения
Способ вождения многозвенного изгибаемого секционного состава, зак-
117368426
лючающийся в создании тянущего усилия управляемости, дополнительно создают вперед по курсу, о тличающий- тянущее усилие назад с силой до 0, - с я тем, что, с целью улучшения его 0,3 от силы тянущего усилия вперед
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ АППАРАТ ДЛЯ УНИЧТОЖЕНИЯ ПОТЕНЦИАЛЬНО ОПАСНОГО СТАЦИОНАРНОГО ОБЪЕКТА | 2017 |
|
RU2670192C9 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| ФОРМИРУЮЩАЯ ПРИСТАВКА ДЛЯ ТОЛКАЕМОГО ДВУХНИТОЧНОГО СОСТАВА | 1970 |
|
SU288575A1 |
| КОЛЕСНЫЙ ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС | 2001 |
|
RU2225327C2 |
| МНОГОКОРПУСНОЕ СУДНО | 2016 |
|
RU2615232C1 |
| Модульный многониточный толкаемый состав | 1982 |
|
SU1068331A1 |
| Транспортировщик водолазов | 2021 |
|
RU2760757C1 |
| ФОРМИРУЮЩАЯ ПРИСТАВКА | 1973 |
|
SU362732A1 |
| РЕЧНОЙ ТОЛКАЕМЫЙ СОСТАВ ИЗ УНИФИЦИРОВАННЫХ СЕКЦИЙ | 1994 |
|
RU2104208C1 |

Изобретение относится к судовождению на внутренних водных путях„ Цель изобретения - улучшение управляемости. Способ вождения многозвенного изгибаемого секционного состава заключается- в создании тянущих усилий вперед по курсу и назад, при этом заднее усилие составляет 0,1 - 0,3 переднего усилия0 5 ил. v
А«г/
S
//
0H9 niS9gfi
У-У
w
Ш9ЈИ
Фиг. 5
