Изобретение относится к ходовым механизмам горных машин, например отвало- образователей.
Цель изобретения - снижение металлоемкости и повышение надежности ходового механизма.
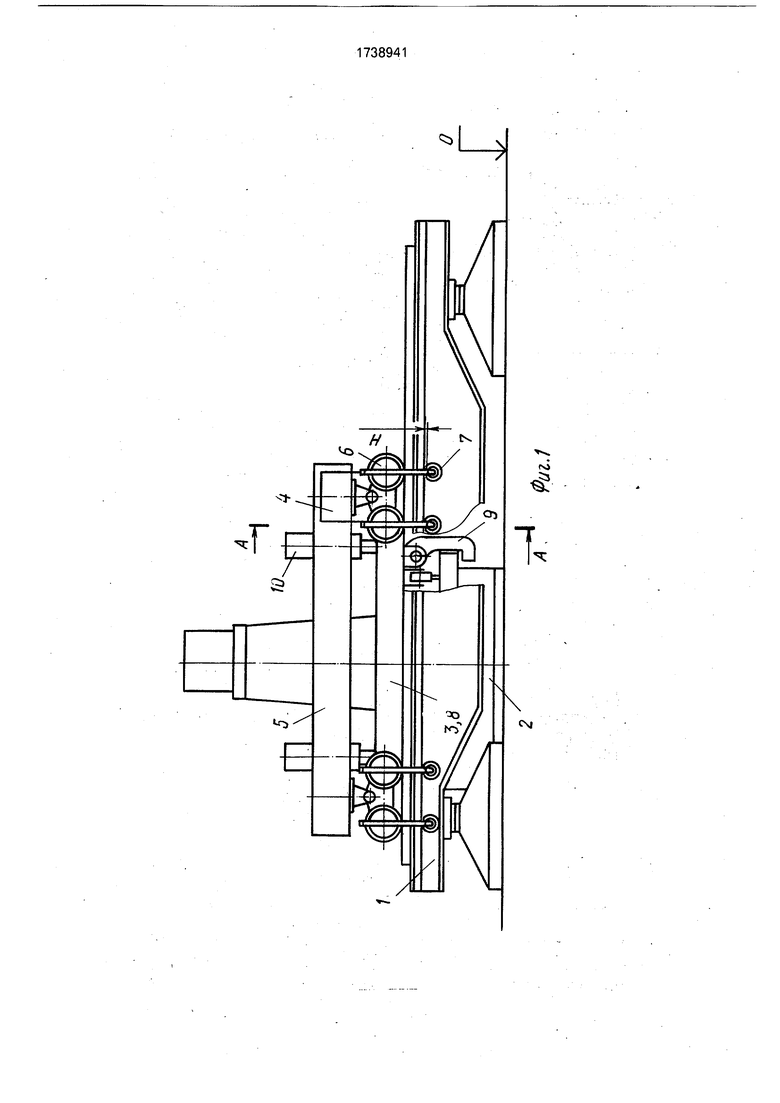
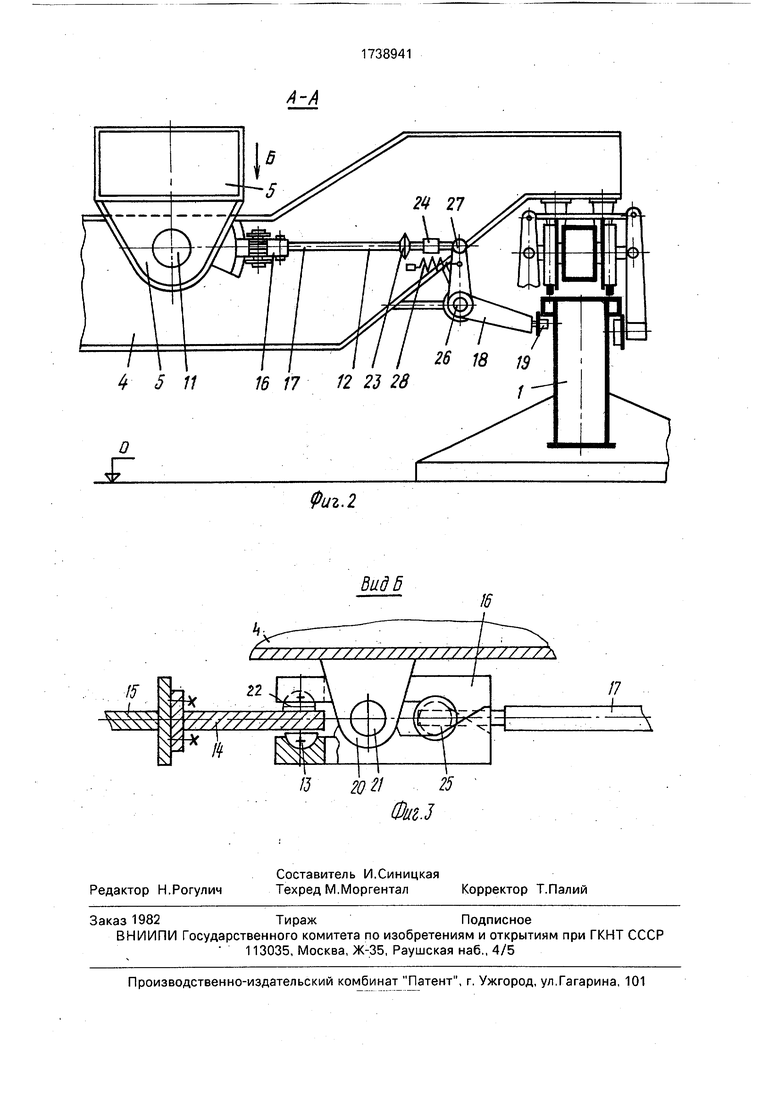
На фиг.1 изображен ходовой механизм, общий вид; на фиг.2 -сечение А-А на фиг.1; на фиг.З - вид Б на фиг.2.
Ходовой механизм горной машины включает связанные между собой опорный узел 1, базу 2, поворотную платформу 3 и балансирную балку 4.
На опорном узле 1 установлена ходовая рама 5 с тележками 6, оснащенными роликами 7.
На базе 2 установлена поворотная платформа 3 через опорно-поворотное устройство 8 и связана с базой 2 подхватами 9, а с ходовой рамой 5 - гидродомкратами 10.
Балансирная балка 4 соединена с ходовой рамой 5 шарниром 11 в виде оси и стабилизатором 12 балансирной балки 4, оснащенным фрикционными элементами 13 и 14.
Ходовая рама 5 выполнена с проушинами 15 и связана с опорным узлом 1 с возможностью свободного хода по вертикали благодаря зазору Н между роликами 7 тележек 6 и металлоконструкцией опорного узла 1.
Стабилизатор 12 выполнен в виде клещевого захвата 16, размещенного на баланVI00 00 Ю
сирной балке 4 с возможностью взаимодействия с проушиной 15 ходовой рамы 5.
Клещевой захват кинематически связан с опорным узлом 1 посредством тяги 17 и качалки 18, взаимодействующей с опорным узлом 1 посредством ролика 19.
Клещевой захват 16 установлен на ба- лансирной балке 4 с возможностью самоустановки относительно проушины 15 ходовой рамы 5.
Клещевой захват 16 установлен на ба- лансирной балке 4 посредством проушины 20 и оси 21 и оснащен фрикционными элементами 13, выполненными полуцилиндрической формы с опиранием на рычаги клещевого захвата 16 по цилиндрическим поверхностям, зафиксированными в клещевом захвате 16 фиксаторами 22, и взаимодействующими с фрикционным элементом 14, установленным на проушине 15 ходовой рамы 5.
Кинематическая связь клещевого захвата 16 с опорным узлом 1 в виде тяги 17 и качалки 18 снабжена упругим элементом 23 и узлом 24 регулировки. Тяга 17 связана с клещевым захватом 16 посредством сухаря 25.
Качалка 18 установлена на балансирной балке 4 посредством шарнира 26 и связана с тягой 17 шарниром 27. Стабилизатор снабжен вспомогательной пружиной 28.
Механизм работает следующим образом.
В исходном положении машина опирается на опорный узел 1 между роликами 7 тележки 6 и металлоконструкцией опорного узла 1 имеется зазор Н, клещевой захват 16 разжат под действием вспомогательной пружины 28, фрикционные элементы 13 не взаимодействуют с фрикционным элементом 14, т.е. балансирная балка может свободно качаться на оси 11.
При выдвижении штоков гидродомкратов 10 происходит опирание машины на базу 2 и отрыв опорного узла 1 от поверхности грунта. При этом зазор Н выбирается, опорный узел нажимает на ролик 19, поворачивает качалку 18, движение передается посредством тяги 17 через сухарь 25 клещевому захвату 16. Клещевой захват 16 фрикционными элементами 13 зажимает фрикционный элемент 14, тем самым фиксирует балансирную балку 4 от поворота относительно ходовой рамы 5, тем самым
исключаются наклоны балансирной балки 4 с опорным узлом 1 и минимизируется высота подъема опорного узла 1 относительно грунта.
Упругий элемент 23 служит в качестве
ограничителя усилия зажатия захвата 16, Регулировочный элемент 24 предназначен для регулировки хода зажатия.
Ролик 19 служит для уменьшения трения между качалкой 18 и опорным узлом 1 при его продольном перемещении.
Фиксаторы 22 удерживают фрикционные элементы 13 от выпадания в разжатом положении клещевого захвата 16.
Клещевой захват 16 имеет возможность качения на оси 21, а фрикционные элементы 13 выполнены полуцилиндрической формы с опиранием на рычаги клещевого захвата 16 по цилиндрическим поверхностям, что в
совокупности обеспечивает самоустановку клещевого захвата 16 относительно фрикционного элемента 14 при перемещении балансирной балки 4 вдоль оси 21 в пределах сборочных зазоров.
При опирании на опорный узел 1 балансирная балка 4 растормаживается. Формула изобретения
1.Ходовой механизм горной машины, включающий связанные между собой опорный узел, базу, поворотную платформу, балансирную балку, соединенную с ходовой рамой шарниром и стабилизатором балансирной балки, оснащенным фрикционными элементами, отличающийся тем, что,
с целью снижения металлоемкости и повышения надежности механизма, ходовая рама выполнена с проушинами, а стабилизатор - в виде клещевого захвата, размещенного на балансирной балке с
возможностью взаимодействия с проушиной ходовой рамы и кинематически связанного с опорным узлом посредством тяги и качалки, имеющей ролик, при этом опорный узел и ходовая рама соединены с возможностью свободного хода по вертикали.
2.Механизм поп.1,отличающий- с я тем, что клещевой захват установлен на балансирной балке с возможностью самоустановки относительно проушины ходовой
рамы.
3.Механизм поп.1,отличающий- с я тем, что кинематическая связь клещевого захвата с опорным узлом снабжена упругим элементом.
143

| название | год | авторы | номер документа |
|---|---|---|---|
| Ходовой механизм тяжелых горно-транспортных машин | 1987 |
|
SU1461837A1 |
| МАШИНА ДЛЯ ВОЗДЕЛЫВАНИЯ КОРНЕКЛУБНЕВЫХ КУЛЬТУР | 1993 |
|
RU2090040C1 |
| УСТРОЙСТВО ДЛЯ ЗАМЕНЫ ХОДОВЫХ КОЛЕС БАЛАНСИРНЫХ ТЕЛЕЖЕК КРАНА | 2004 |
|
RU2256598C1 |
| ПЕРЕДВИЖНОЙ РАЗГРУЗОЧНЫЙ КОМПЛЕКС | 2005 |
|
RU2414410C2 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ТЯЖЕЛЫХ КРУПНОГАБАРИТНЫХ ГРУЗОВ | 1991 |
|
RU2023604C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНАЯ МАШИНА | 2009 |
|
RU2398062C1 |
| Подвеска моста транспортного средства | 1990 |
|
SU1728057A1 |
| Отвалообразователь | 1978 |
|
SU754072A1 |
| ХОДОВАЯ ЧАСТЬ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2294297C1 |
Сущность изобретения: ходовой механизм горной машины включает связанные между собой опорный узел, базу, поворотную платформу, балансирную балку, соединенную с ходовой рамой шарниром и стабилизатором балансирной балки, оснащенным фрикционными элементами. Ходовая рама выполнена проушинами, а стабилизатор - в виде клещевого захвата, размещенного на балансирной балке с возможностью взаимодействия с проушиной ходовой рамы посредством фрикционных элементов и кинематически связанного с опорным узлом посредством тяги и качалки, имеющей ролик. Опорный узел и ходовая рама связаны между собой тележками с роликами с возможностью свободного хода по вертикали благодаря зазору между роликами тележек и металлоконструкцией опорного узла. Клещевой захват установлен на балансирной балке- посредством проушин и оси с возможностью самоустановки относительно проушины ходовой рамы. Кинематическая связь в виде тяги и качалки клещевого захвата с опорным узлом снабжена упругим элементом. 2 з.п. ф-лы, 3 ил. (Л С
Фиг.2
i ////// //////////// /у //// /
Вид 5
Ю
/7
| Ходовой механизм тяжелых машин | 1975 |
|
SU606961A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ходовой механизм тяжелых горно-транспортных машин | 1987 |
|
SU1461837A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
