Изобретение относится к автоматике и вычислительной технике и может быть использовано для определения направления и контроля перемещения объекта относительно двух датчиков, следующих один за другим с некоторым интервалом, а длина объекта больше расстояния между датчиками.
Известно сигнальное устройство для определения направления вращения вала, содержащее два датчика и D-триггер, причем выход первого датчика соединен с D-входом D-тр иг- гера, а выход второго датчика соединен с С-входом D-триггера.
Недостатком данного устройства является выдача ложных сигналов о направлении движения при колебании объекта в зоне срабатывания одного датчика.
Цель изобретения - повышение на- а дежности.
Поставленная цель достигается тем, что в сигнальное устройство для определения направления вращения вала, содержащее два датчика и D-триггер, введены элемент задержки, элемент ИЛИ-НЕ, первая и вторая установочные шины, причем выход первого датчика соединен с D-входом D-трж гера через элемент задержки, а выход второго датчика соединен с С- входом D-триггера через элемент . ИЛИ-НЕ, при этом выход первого датчика соединен с вторым входом элемента ИЛИ-НЕ, а первая и вторая установочные шины соединены соответственно с входом установки логической единицы и входом установки логического нуля D-триггера.
1
оо
СО
ю
со
СО
, 3 1
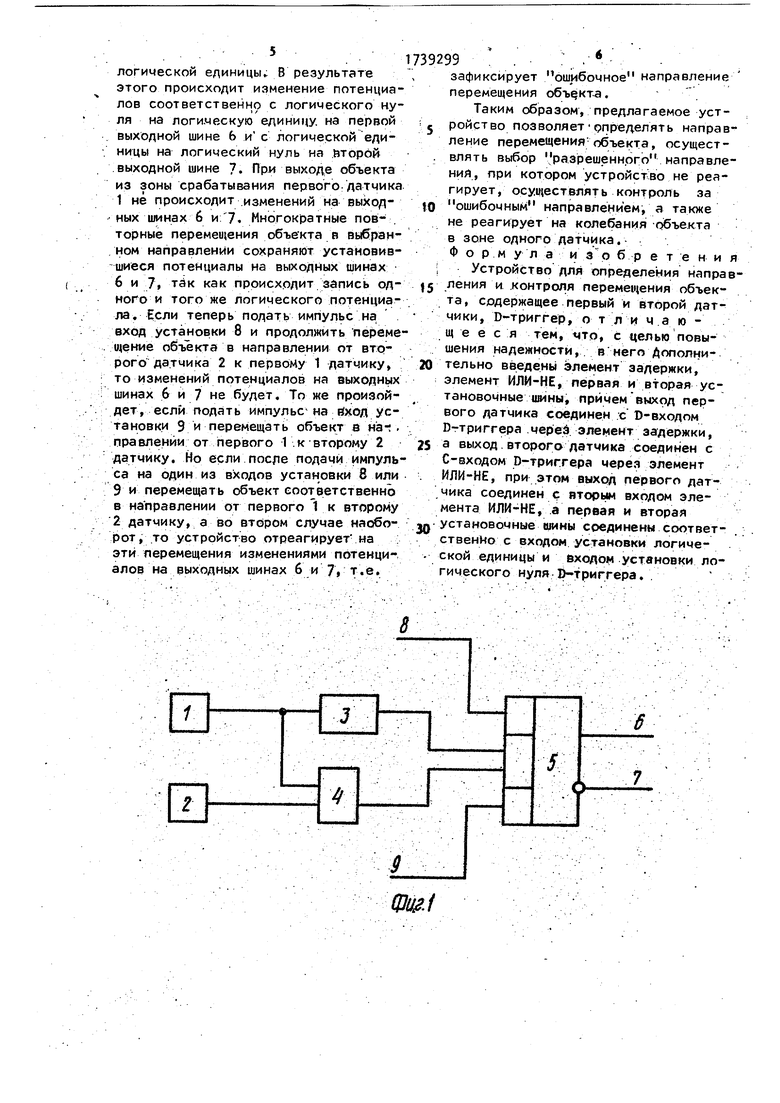
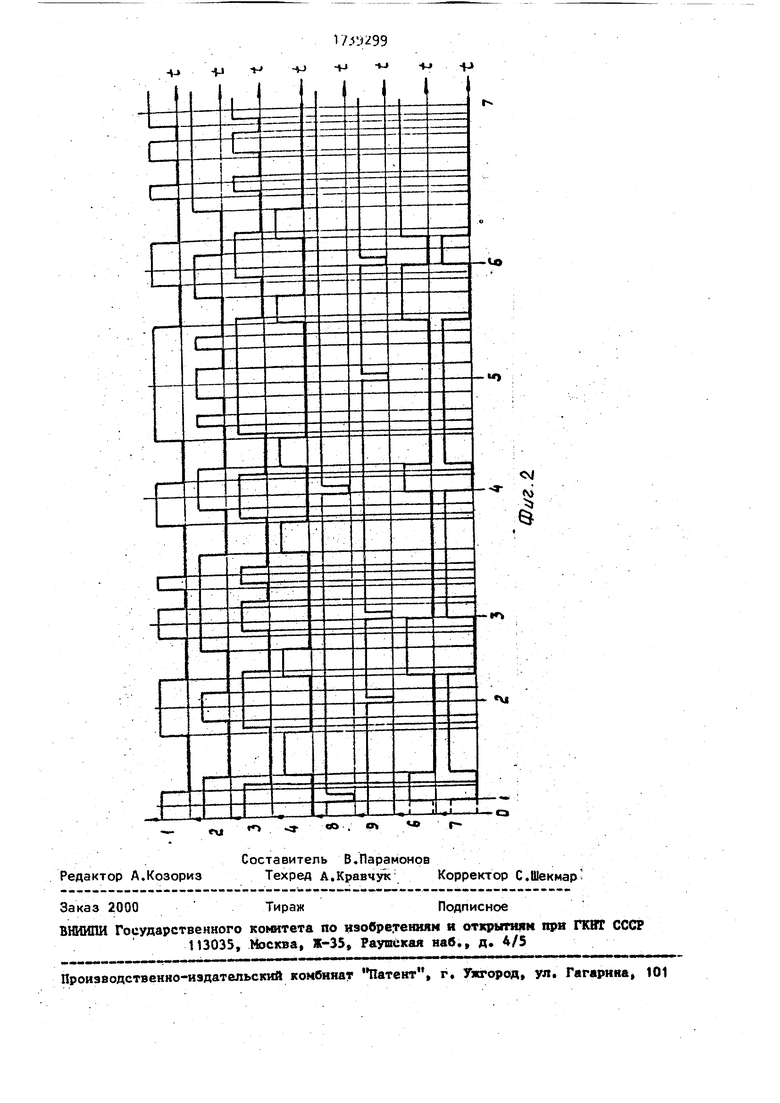
.На фиг. V показана функциональная схема устройства; на фиг.2 - временные Диаграммы работы устройства. Устройство содержит первый 1 и второй 2 датчики, элемент 3 задержки, элемент k контроля состояния датчиков ИЛЙ-HEv В-триггер 5, первую 6 и вторую 7 выходные.шины, первый 8 и .второй 9 установки. Выход первого 1 датчика соединен с первым входом элемента ft контроля состояния ; датчиков ИЛИ-НЕ и через элемент 3 задержки с информационным входом О триггера 5. Выход второго датчика 2соединёнс вторым входом элемента контроля, состояния датчиков .-. ИЛИгНЕ, выход которого соединен с тактовым входом D-триггера 5 прямой и инверсный выходы которого соедине- .ны соответственно с пе рвой 6 и второй 7 выходными шинами. Первый вход 8 установки соединен с входом .уста- ;-- новки логической единицы D-тригге- ра 5. Второй вход 9 установки соединен с входом установки логического .нуля D-триггера 5. .
Устройство работает следующим об- ;разом..
В исходном состоянии, когда объ ект отсутствует в зоне .срабатывания датчиков, при включении питания на
выходах Вттриггера 5 устанавливаются произвольные логические потенциалы. Допустим, на первой 6 выходной шине установился потенциал логического нуля, а на второй 7 выходной шине - ; логической единицы. Пусть объект перемещается в направлении от первого датчика 1 к второму датчику 2. Тогда при входе объекта в зону срабатывания, первого Датчика Т. на его :
выходе устанавливается потенциал ло , тического нуля . Этот потенциал не
изменяет значения выходных потенциалов ни элемента k контроля ИЛИ-НЕ, ни D-триггера 5 по принципу их ра- . боты, т.е. на выходных шинах.6 и 7
сохраняются прежние потенциалы. По- этому и колебания в зоне срабатывания первого датчика 1 не приводят к каким-либо изменениям. Дальнейшее
перемещение объекта в начально выбранном направлении приводит объект в зону срабатывания второго датчика 2, на выходе которого устанавливает-1 ся потенциал логического нуля. В это же время такой же потенциал еще сохраняется на выходе первого датчит
39299 . 4
ка 1 из-за значительной длины объ- екта,. поэтому по принципу работы
элемента ИЛИ-НЕ на выходе элемента с М контроля ИЛИ-НЕ происходит изменение выходного потенциала с логиче. ского нуля на логическую единицу,
которым производится запись в р-триг- гёр 5 значения потенциала, уста- .. tO новленного на его информационном входе.
К моменту «записи на этом входе с
выхода, элемента 3 задержки устанавливается потенциал нуля. Следова- .
|5 тельно, на выходных шинах 6 и 7 по- I еле записи в D-триггер 5 потенциалы сохраняют свое прежнее значение.При выходе объекта из зоны срабатывания второгр датчика 2 не происходит | 20 изменений на выходных шинах 6 и 7. .. Повторные перемещения объекта в на- 1 правлении от первого датчика t к второму датчику 2 приводят к записи одного и того же логического потен- 1 25 циала, при котором на выходных шинах 6 и .7 сохраняются прежние потенциалы,, т.е. устройство как бы не реагирует на многократные повторные перемещения объекта в одном направлении; Те-. JQ- перь изменим, направление перемеще- . ;ния объекта на обратное, т.е. в на- I правлении от второго датчика 2 кпер-м вому датчику Т. После предыдущего j направления на первой выходной шине 6 устанавливается потенциал логическо-1 . го нуля, а на второй выходной шине 7-; потенциал логической единицы. Вход ; объекта в зону срабатывания второго : датчика 2 и его колебание в этой зоне приводят к изменениям потенциала на выходе второго датчика. 2, которые не могут произвести запись в D-триггер, 5 так как элемент контроля ИЛИ-НЕ 4 заперт выходным потенциалом первого датчика 1. Дальнейшее перемещение объекта в выбранном направлений приводит объ- , ект в зону срабатывания первого дат- . чика 1 на выходе которого устанав- .; v JQ ливается потенциал логического нуля. Тогда, по принципу работы элемента ИЛИ-НЕ, на выходе элемента контроля ИЛИ-НЕ Ь происходит изменение выходного потенциала с логического нуля на логическую единицу, которым производится запись в Ь-триггер 5 значения потенциала, установленного на информационном входе с выхода элемента задержки, т.е. потенциала
15
40
45
55
логической единицы В результате этого происходит изменение потенциалов соответственно с логического нуля на логическую единицу на первой выходной шине 6 и с логической единицы на логический нуль на второй выходной шине 7. При выходе объекта из зоны срабатывания первого датчика
1не происходит изменений на выходных шинах 6 и 7. Многократные повторные перемещения объекта в выбранном направлении сохраняют установившиеся потенциалы на выходных шинах
6 и 7, так как происходит запись одного и того же логического потенциала. Если теперь подать импульс на вход установки 8 и продолжить перемв1 щение объекта в направлении от второго датчика 2 к первому 1 датчику, то изменений потенциалов на выходных шинах 6 и 7 не будет. То же произойдет, если подать импульс на йход установки 9 и перемещать объект в на-; . правлении от первого 1 к второму 2 датчику. Но если после подачи импульса на один из входов установки 8 или 9 и перемещать объект соответственно в направлении от первого 1 к второму
2датчику, а во втором случае наоборот, то устройство отреагирует на эти перемещения изменениями потенциалов на выходных шинах б и 7 т.е.
739299
зафиксирует ошибочное направление перемещения объекта.
Таким образом, предлагаемое уст- с ройство позволяет-определять направление перемещения объекта, осуществлять выбор разрешенного направления, при котором устройство не реагирует, осуществлять контроль за to ошибочным направлением, а также не реагирует на колебания объекта в зоне одного датчика. Формула изобретения Устройство для определения направ- J5 ления и контроля перемещения объекта, содержащее первый и второй датчики, D-триггер, отличающееся тем, что, с целью повышения надежности, в него дополни20 тельно введены элемент задержки, элемент ИЛИ-НЕ, первая и вторая установочные шины, причем выход первого датчика соединен с D-входом D-триггера через элемент задержки,
25 а выход второго датчика соединен с С-входом D-триггера через элемент ИЛИ-НЕ, при этом выход первого датчика соединен с вторым входом элемента ИЛИ-НЕ, а первая и вторая
эп установочные шины соединены соответственно с входом установки логиче- . ской единицы и входом установки логического нуля D-триггера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для счета перемещающихся объектов | 1990 |
|
SU1770964A1 |
| Устройство для контроля магистралей ЭВМ | 1980 |
|
SU945868A1 |
| Устройство для контроля движения объектов | 1984 |
|
SU1193714A1 |
| Система управления | 1987 |
|
SU1444707A1 |
| Устройство для управления шаговым двигателем | 1987 |
|
SU1456934A1 |
| Двухрежимный распределитель импульсов для управления трехфазным шаговым двигателем | 1981 |
|
SU1019571A1 |
| Способ поиска дефектов в цифровых блоках и устройство для его осуществления | 1985 |
|
SU1260884A1 |
| Микропроцессорное устройство управления горизонтальным затвором с электромеханическим приводом для загрузки железнодорожных вагонов | 1991 |
|
SU1837042A1 |
| Способ декодирования кода с расщепленной фазой и устройство для его осуществления | 1990 |
|
SU1728970A1 |
| Устройство контроля последовательности импульсов | 1986 |
|
SU1383489A1 |
Использование: определение направления и контроль перемещения объекта относительно двух датчиков, следующих один за другим с некоторым интервалом, а длина объекта больше расстояния между датчиками. Сущность изобретения: устройство содержит два датчика 1 и 2, элемент 3 задержки, элемент ИЛИ-НЕ , D-триггер 5, две выходные шины 6 и 7 и две входные установочные шины 8 и 9. , , 1-4, 8-5, 9-5, 2 ил.
ete/
1 /УЛЭ9 -t -vi t- -м -м-р
- «м
t«
«О
Составитель В.Парамонов Редактор А.Козориз Техред A.KpasMyk Корректор С.Шекмар1
Заказ 200°ТиражПодписи
ВНИИПИ Государственного коюггета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
«Л
«А
| Авторское свидетельство СССР № , кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
