Изобретение относится к устройствам, обеспечивающим проведение погрузо-раз- грузочных и транспортных операций бухт или катушек, например бухт алюминиевой катанки на алюминиевых заводах. , Известен автоматический захват для штучных грузов, выполненный в виде верхней и нижней траверсе с установленными на них захватными рычагами, к верхней траверсе прикреплены направляющие, а обе траверсы соединены между собой канатным полиспастом с уравнительным блоком, который снабжен противовесом, перемещающимся в направляющих, причем один из захватных рычагов жестко прикреплен к нижней траверсе.
Недостатком известного устройства для захвата штучных грузов является невысокая производительность, так как требуется точное ориентирование траверсы над грузом, а также необходимость выполнения операции поперечного перемещения траверсы
для установки неподвижного захватного рычага над грузом.
Известно захватное устройство для пакетированных грузов, содержащее верхнюю траверсу, соединенную с ней нижнюю траверсу, на которой шарнирно установлены захватные рычаги, и механизм фиксации положения захватных рычагов, снабжено жестко закрепленными на нижней траверсе стойками с опорными катками, причем на внутренней стороне каждой стойки шарнирно установлен подпружиненный ролик для взаимодействия с грузом.
Недостатком известного устройства является жесткость конструкции, не обеспечи- вающей в полной мере-возможность предотвращения механического повреждения транспортируемого груза.
Цель изобретения - повышение сохранности груза.
Поставленная цель достигается тем. что захватное устройство для пакетированных грузов по а.с. Nb 863503 снабжено прикрепсл
С
х|
Јь
О ГО Ю 00
Ю
ленными к нижней траверсе и нижним плечам рычагов направляющими и тросами, закрепленными концами на нижних плечах рычагов и последовательно огибающими направляющие нижней траверсы и нижних плеч рычагов, которые выполнены телескопическими. Кроме того, тросы могут быть снабжены гибкой оболочкой. Телескопические рычаги рычагов подпружинены друг от- носительно друга, а направляющие в верхней части вертикального плеча рычага выполнены неподвижными, а в нижней части подвижными.
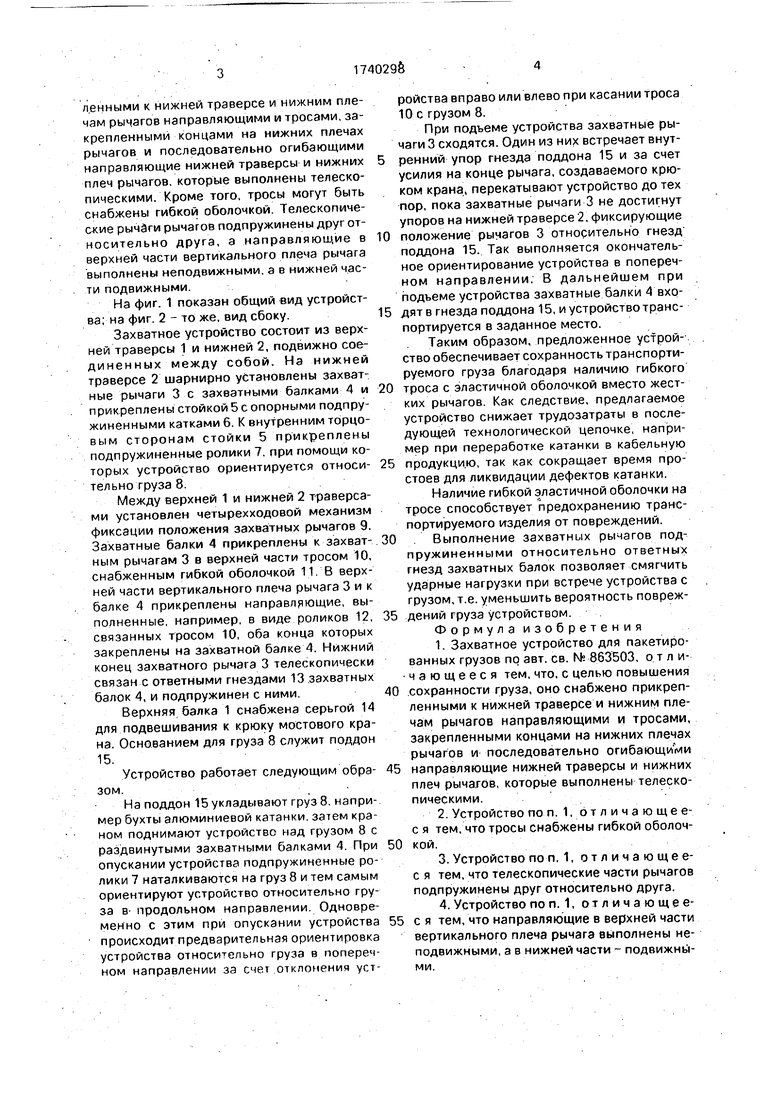
На фиг. 1 показан общий вид устройства; на фиг. 2 - то же, вид сбоку.
Захватное устройство состоит из верхней траверсы 1 и нижней 2, подвижно сое- диненных между собой. На нижней траверсе 2 шарнирно установлены захватные рычаги 3 с захватными балками 4 и прикреплены стойкой 5 с опорными подпружиненными катками 6. К внутренним торцовым сторонам стойки 5 прикреплены подпружиненные ролики 7. при помощи которых устройство ориентируется относительно груза 8.
Между верхней 1 и нижней 2 траверсами установлен четырехходовой механизм фиксации положения захватных рычагов 9. Захватные балки 4 прикреплены к захватным рычагам 3 в верхней части тросом 10, снабженным гибкой оболочкой 11 В верхней части вертикального плеча рычага 3 и к балке 4 прикреплены направляющие, выполненные, например, в виде роликов 12, связанных тросом 10, оба конца которых закреплены на захватной балке 4. Нижний конец захватного рычага 3 телескопически связан с ответными гнездами 13 захватных балок 4, и подпружинен с ними.
Верхняя балка 1 снабжена серьгой 14 для подвешивания к крюку мостового крана. Основанием для груза 8 служит поддон 15.
Устройство работает следующим образом.
На поддон 15 укладывают груз 8. например бухты алюминиевой катанки, затем краном поднимают устройство над грузом 8 с раздвинутыми захватными балками 4. При опускании устройства подпружиненные ролики 7 наталкиваются на груз 8 и тем самым ориентируют устройство относительно груза в продольном направлении Одновременно с этим при опускании устройства происходит предварительная ориентировка устройства относительно груза в поперечном направлении за счет отклонения устройства вправо или влево при касании троса 10с грузом 8.
При подъеме устройства захватные рычаги 3 сходятся. Один из них встречает внутренний упор гнезда поддона 15 и за счет усилия на конце рычага, создаваемого крюком крана, перекатывают устройство до тех пор, пока захватные рычаги 3 не достигнут упоров на нижней траверсе 2, фиксирующие
положение рычагов 3 относительно гнезд поддона 15. Так выполняется окончательное ориентирование устройства в поперечном направлении. В дальнейшем при подъеме устройства захватные балки 4 входят в гнезда поддона 15, и устройство транспортируется в заданное место.
Таким образом, предложенное устройство обеспечивает сохранность транспортируемого груза благодаря наличию гибкого
троса с эластичной оболочкой вместо жестких рычагов. Как следствие, предлагаемое устройство снижает трудозатраты в последующей технологической цепочке, например при переработке катанки в кабельную
продукцию, так как сокращает время простоев для ликвидации дефектов катанки.
Наличие гибкой эластичной оболочки на тросе способствует предохранению транспортируемого изделия от повреждений.
Выполнение захватных рычагов подпружиненными относительно ответных гнезд захватных балок позволяет смягчить ударные нагрузки при встрече устройства с грузом, т.е. уменьшить вероятность повреждений груза устройством.
Формула изобретения
1.Захватное устройство для пакетированных грузов по авт. св. № 863503, отличающееся тем, что. с целью повышения
сохранности груза, оно снабжено прикрепленными к нижней траверсе и нижним плечам рычагов направляющими и тросами, закрепленными концами на нижних плечах рычагов и последовательно огибающими
направляющие нижней траверсы и нижних плеч рычагов, которые выполнены телескопическими.
2.Устройство по п. 1, отличающее- с я тем, что тросы снабжены гибкой оболочкой.
3.Устройство по п. 1, отличающее- с я тем, что телескопические части рычагов подпружинены друг относительно друга.
4.Устройство по п. 1, отличающее- с я тем, что направляющие в верхней части
вертикального плеча рычага выполнены неподвижными, а в нижней части - подвижными.
1740298
1011
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для пакетированных грузов | 1979 |
|
SU863503A1 |
| Автоматический магнитный захват | 1978 |
|
SU789368A1 |
| Захватное устройство для пакетированных грузов | 1976 |
|
SU624866A1 |
| Автоматическое захватное устройство | 1982 |
|
SU1030298A1 |
| Захватное устройство для пакетированныхНА пОддОНЕ гРузОВ | 1979 |
|
SU829540A1 |
| Устройство для погрузки и разгрузки контейнеров и поддонов из транспортных средств | 1985 |
|
SU1281491A1 |
| Захватное устройство для грузов на поддонах | 1980 |
|
SU910524A1 |
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Грузозахватное устройство | 1980 |
|
SU906893A1 |
| Захватное устройство для труб | 1987 |
|
SU1504200A1 |
Изобретение относится к подъемно- транспортному машиностроению. Сущность изобретения: захватное устройство для пакетированных грузов содержит верхнюю 1 и нижнюю 2 траверсы. На нижней траверсе 2 шэрнирно установлены телескопические захватные рычаги 3. Между траверсами расположен четырехходовый механизм фиксации положения захватных рычагов 9. К нижней траверсе 2 и нижним плечам захватных рычагов 3 прикреплены направляющие 12. Направляющие 12 огибают тросы 10 и 11, закрепленные одними концами на нижних плечах рычагов. Тросы 10 и 11 расположены в гибкой оболочке. 3 з.п. ф-лы, 2 ил.
| Захватное устройство для пакетированных грузов | 1979 |
|
SU863503A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
