Изобретение относится к грузозахватным устройствам, предназначенным, в частности, для перегрузки пакетированных грузов.
Известно захватное устройство для пакетированных грузов, содержащее траверсу, соединенную с ней П-образную раму с .захватными органами и установленные на ней прижимные щиты, снабженные.гидравлическим приводом 1}.
Однако это устройство сложно по конструкции из-за наличия в нем гидравлического привода.
Наиболее близким к изобретению по технической сущности является захватное устройство для грузов на. поддонах, содержацее траверсу, соединенную с ней П-образную раму, в вертикальных стойках которой установлены захватные органы и шарнирно соединенные с ними вертикальные итанги, и механизм фиксации взаимного положения траверсы и рамы 2.
Недостатком этого устройства является недостаточная надежность работы из-за возможности развала незафиксированного на поддоне груза, например кирпичей.
Целью изобретения является повышение надежности работы устройства.
Цель дocтигaeтqя тем, что устрой-, ство снабжено прижимными щитами, установленными на вертикальных стойках рамы посредством кронштейнов с роликами и соединенными со штангами клиньями, а каждый захватный орган выполнен в виде ползуна, связанного
10 с траверсой гибкой тягой.
При этом механизм фиксации взаимного положения траверсы и.рамы содержит закрепленные на траверсе винт с несамотормозяцейся резьбой, на ко15тором установлен фиксатор в виде конуса с заплечиками, и стопор, а на раме закреплена полая стойка с в Лзтупами для взаимодействия с заплечиками фиксатора.
20
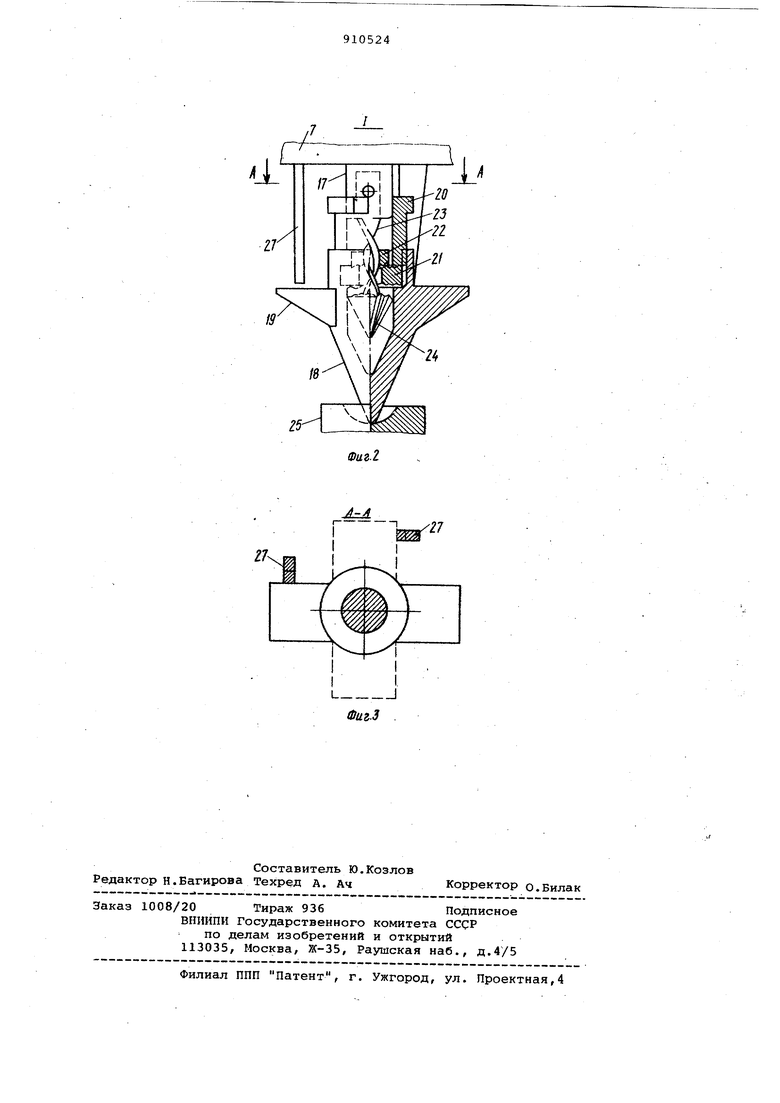
Па фиг.. 1 устройство, общий вид; на фиг. - механизм фиксации (узел I на фиг.1); на фиг.З :разрез А-А на фиг.2.
Захватное устройство содержит
25 П-образную несущую раму 1, на стойках которой смонтированы вертикально подвижные штанги 2, связанные через шарнирные звенья 3 с захватными органами в виде ползунов 4, раз
30 1ещенных между роликами 5, укрепленными в нижней части стоек рамы. Сверху на раме установлена коробчатая вертикальная полая стойка 6 для траверсы 7, взаимодействующей при опускании ее в крайнее нижнее положение со штангами 2.
Траверса соединена тросами 8, огибающими установленные на раме блоки 9 и 10, с шарнирными звеньями и ползунами 4, взаимодействующими с поддоном 11.
Внутри рамы установлены решетчатые ограждающие и центрирующие груз прижимные щиты 12, установленные посредством крошатейнов 1J, размещенных между укрепле нными на стойках рамы роликами 14,и клиньев 15, имеющими на рабочей поверхности пазы (не показаны) , входякдиё В зацепление с рабочей тсрааью клиньев 16, закрепленных на атангаи 2,
К траверсе посрейЬтвом стержня 17 прикреплен фиксатор 18 в виде конуса, снабженного зат ёчиками 19. Фикстор 18 выполнен с еогставйым корпусом содержащим втулку 20, на которую навинчена миясняя часть корпуса, несущая иайбу 21 с р} фл н:выми поверхностями, контактируй1-адЫ)н с цектрйльно установленной гайкой 22, через которую пропущен вза1&1одействующий с ней ВИЙт 23 с несамотормоэящейся . резьбой с ограничительным конусом 24 На раме закреплен упор 25 с лункой для опирания корпуса фиксатора 18 пр опускании траверсы в крайнее нижнее положение.
Внутри полой стойки 6 выполнены два выступа 26, взаимодействующие с задленйками фиксатора 18, и стопор 27, рграничивающий заданный угол поворота фиксатсра при опйрании его корпуса в упор 25. В совокупности описанные фиксатор 18 и выступы 26 стойки б для траверсы представляют собой ме;:анизм фиксации положения захватных органов 4. Захватные орган и примьасакндие к ним узлы закрыты кожухсял 28.
Работа захватного устройства осуществляется следующим образом.
В исходном положении траверса 7 находится на урО:вне нижней части стойки б, выступы 26 которой опира ются иа заплечики 19 фиксатора 18. При этом тросы 8 Ослаблены, а штанги 2 не испытывают давления траверсы 7 и под действием собственной массы удерживают через шарнирные звенья 3/ползун 4 в нерабочем положении. ОднЭйременно ограждающие щиты 12, связанные клиньями 15С соответствующим им клиньями 16 штанг 2, приближены к стойкам рамы 1. В таком положении захват наводят на груз, опуская на опорную площадку поддона 11. При посадке -рамы захвата траверса 7 под действием собственного веса опускается по стойке б до опирания в упор- 25
фиксатора 18 и поворота последнего на угол 90,при котором заплечики получают возможность бесЛрепятственного прохода в пространство между вы{ступами 26 направляющей. В это время траверса 7, опускаясь, садится на штанги 2.
При подъеме груза траверса 7 в начальный момент скользит вверх по стойке 6, освобождая гитанги 2, и натягивает тросы 8, которые передают усилия ползунам 4, выдвигающимся под поддон 11. Фиксатор 18 свободно проходит между выступами 26. 11арнирные звенья 3 воздействуют на ытаНги 2, поднимая их. В свою очередь штанги, поднимаясь, перемещают щиты 12 навстречу друг другу, обнимая и центрируя груз йа поддоне, что .предотвращает;. перекос захвата и разброс груза при транспортировании.При опускании груза на поверхност траверса 7 в моиеит касания рамой 1 опорной Плоададки перемещается Вниз до опирания в упор-25 фиксатора 18 и поворота его на угол 90°. Тросы 8 ослабляются, а траверса 7 воздействует на атанги 2, которые через шарнирные звенья 3 отодвигают ползуны 4 от поддона 11, а через клинья 1 и 16 - щиты 12 от груза.
При освобождении захвата от груза вначале перемё1цается вверх траверса 7 до момента зацепления с выступами 26 заплечиков 19 фиксатора, совершившего при опускании груза поворот на угол 90 . Захват и механизм фиксации Вновь занижают исходное положени
Предлагаемое захватное устройство эффективно в работе. Такая конструкция захватного устройства создает определенны эконопйческий эффект.
Формула изобретения
1.Захватное устройство для грузов на поддонах, содержащее траверсу соединенную с ней п-образную ,
в вертикальных стойках которой установлены захватные органы и шарнирно соединенные с ними вертикальные штанги, и механизм фиксации взаимного положения траверсы и рамы, отличающееся тем, что., с целью повышения надежности работы, оно снабжено прижимными щита1.1и, установленными на вертикальных стойках рамы посредством кронштейнов с роликами и соединенными со штангами клиньями, а каждый захватный орган выполнен в виде ползуна, связанного с траверсой гибкой тягой.
2.Устройство по п.1, отличаю щ е е с , что механизм фиксации взаимного положения траверсы и рамы содержит закрепленные на траверсе винт с несамотормозящейся резьбой, на котором установлен фиксатор в виде конусп с заплечикс1ми, и стопор,у а на ране закреплена полая стойка с Ьиступами для взаимодействия ,с заплечиками фиксатора.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 619442, кл. В 66 С 1/32, 1972.
2,Авторское свидетельство СССР 667482, кл. В 66 С 1/28, 1979 (прототип).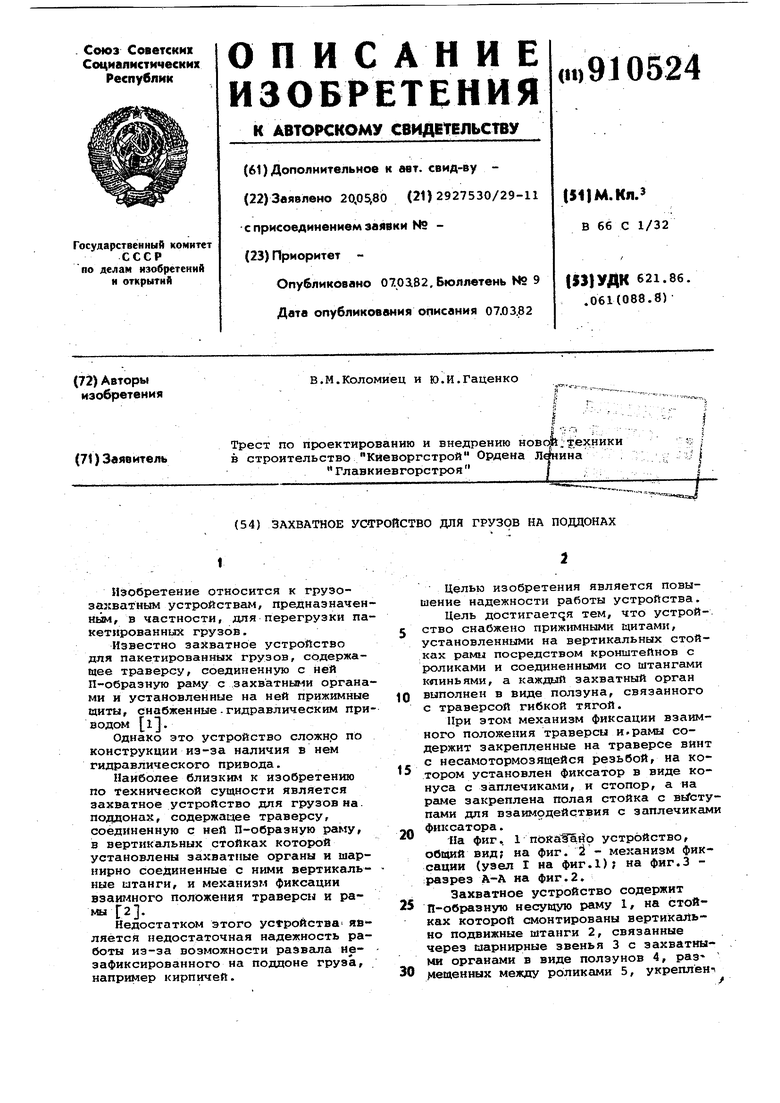
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевой захват | 1977 |
|
SU703467A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1973 |
|
SU388997A1 |
| Автоматический захват | 1981 |
|
SU977358A1 |
| Захват-кантователь | 1983 |
|
SU1137056A1 |
| УСТРОЙСТВО для ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ | 1968 |
|
SU213307A1 |
| Грузозахватное устройство | 1990 |
|
SU1744036A1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| Устройство для захвата груза на поддоне | 1982 |
|
SU1121227A1 |