(54) АВТОМАТИЧЕСКИЙ МАГНИТНЫЙ ЗАХВАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический магнитный захват | 1982 |
|
SU1051029A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| ГРУЗОВАЯ ТРАВЕРСА | 2001 |
|
RU2214961C2 |
| Магнитное грузозахватное устройство | 1975 |
|
SU821379A1 |
| Устройство для сверления отверстий на концах лесоматериалов | 1989 |
|
SU1648764A1 |
| Устройство для погрузки и разгрузки тары | 1982 |
|
SU1036633A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗДЕЛИЙ ИЗ ПОЛОСОВОГО ШПОНА | 1995 |
|
RU2064862C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВАЛОВА ОБЩИМ И ЦИКЛИЧЕСКИМ ШАГОМ ЭЛАСТИЧНОЙ ЛОПАСТИ НЕСУЩЕГО ВИНТА КОМБИНИРОВАННОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2043948C1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |


I
Изобретение относится к машиностроению, в частности к грузоподъемным механизмам, и может быть использовано в конструкциях грузозахватных устройств с автоматическим магнитным захватом.
Известно грузозахватное устройство с постоянными магнитами и автоматическим циклом работы, содержащее корпус, в котором установлены подвижный и неподвижный блоки постоянных магнитов, и закрепленное на подвижном блоке зубчатой рейки, взаимодействующей с зубчатым сектором, взаимосвязанной с элементами его перемещения 1.
Однако исполнение механизма переключения удобно.при наличии в устройстве только одного блока магнитов. Использование нескольких магнитов при перемещении деталей делает конструкцию с применением узла переключения громоздкой и неудобной при эксплуатации.
Известно также устройство для перемещения грузов с использованием одновременно нескольких магнитных блоков, содержащее траверсу с установленной на ней с возможностью вертикального перемещения подвеской, расположенные в корпусах блоки постоянных подвижных и неподвижных магнитов, и механизм управления подвижными магнитами 2.
Однако в устройстве механизм управления выполнен в виде, по крайней мере, двух жестко закрепленных на одной оси рычагов, один из которых щарнирно соединен с подвижным магнитом, а другой взаимодействует с укрепленным на жесткой подвеске профильным кулачком, причем ось шарнирно укреплена на корпусе, что несколько ограничивает возможности применения данного захватного устройства. При изменении транспортируемого груза по габаритам или массе требуется увеличение количества магнитных блоков, что затрудняет возможность управления ими, т. е. требуется дополнительное количество рычагов и соответственно
15 усиление оси, на которой они крепятся. Это значительно усложняет конструкцию и условия ее эксплуатации.
Цель изобретения - расширение эксплуатационных возможностей.
Поставленная цель достигается тем, что механизм управления имеет главный барабан и профильный кулачок, закрепленные на траверсе на общей оси, рабочие барабаны, каждый из которых установлен на корпусе
блока магнитов посредством оси и гибкими тягами соединен с главным барабаном, и двуплечий рычаг, шарнирно закрепленный на подвеске, одно плечо которого подпружинено, а второе снабжено пальцем, взаимодействующим с вырезами профильного кулачка, при этом ось каждого рабочего барабана имеет поводок для перемещения подвижных магнитов.
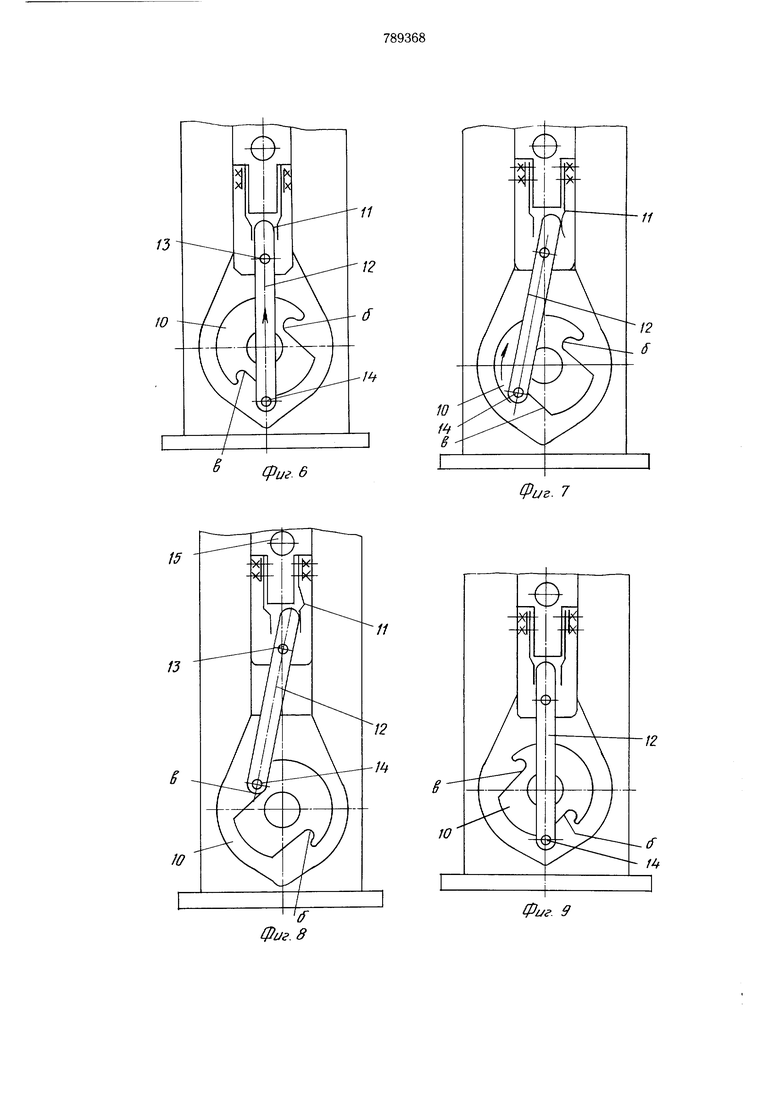
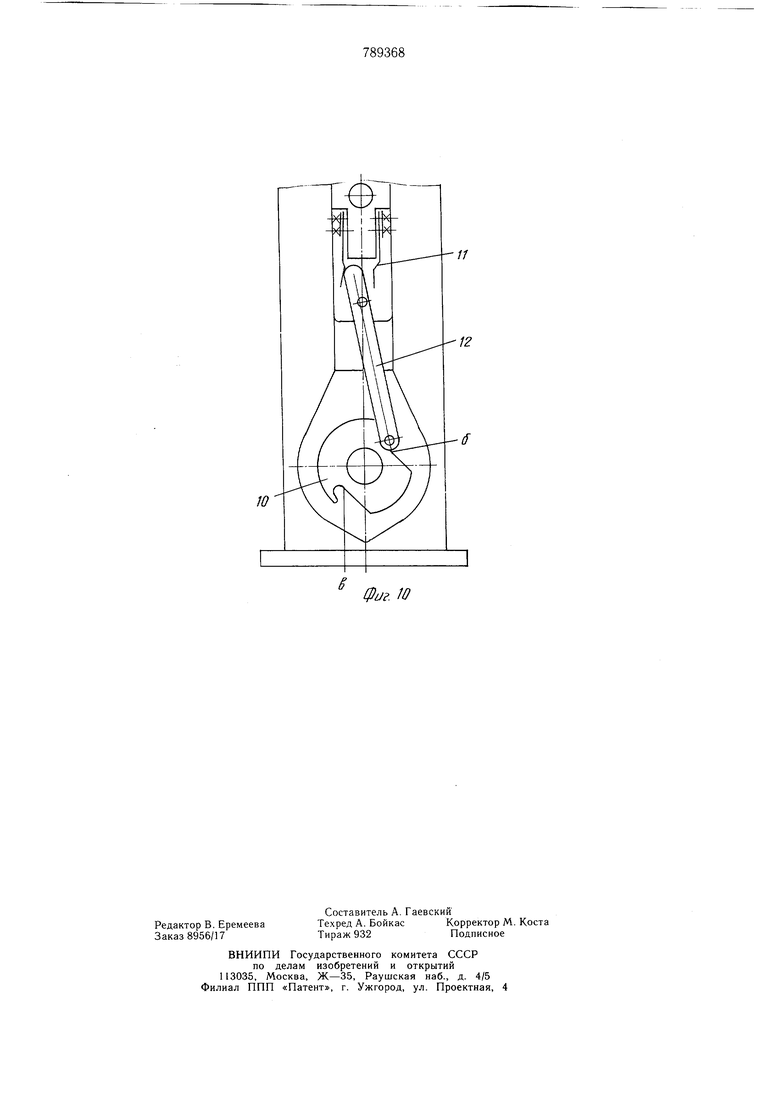
На фиг. 1 с.хематически изображено предлагаемое устройство; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - вид В на фиг. 2; на фиг. 5 - сечение Г-Г на фиг. 4; на фиг. 6-10 - поочередные фазы цикла работы предлагаемого устройства.
Автоматический магнитный захват содержит траверсу 1 с установленной на ней подвеской 2, выполненной с пазом а, и закрепленные на траверсе корпуса 3 с подвижными 4 и неподвижными 5 блоками постоянных магнитов, а также механизм управления ими, выполненный в виде установленных на корпусе каждого блока барабанов 6, каждый из которых соединен гибкими тягами/с главным барабаном 8, закрепленным на оси 9, а также закрепленны.м на этой оси профильным кулачком 10, взаимодействующим своими вырезами б и в с подпружиненным пружиной 11 двуплечим рычагом 12, закрепленным на оси 13. Другой конец рычага имеет палец 14. В пазу а расположен направляющий палец 15, а барабаны 6 установлены на осях 16 и имеют поводки 17, расположенные эксцентрично этой оси. Гибкая тяга представляет собой трос, заключенный в оболочку из плотно навитой проволоки (рубашки).
.Автоматический магнитный захват работает следующим образом.
При опускании захвата на изделие приходит в движение подвеска 2 в полости стойки траверсы 1. При этом палец 14 рычага 12 выходит из зацепления с вырезом б кулачка 10, а рычаг 12, перемещаясь вниз, в крайнем нижнем положении под действием пружины 11 принимает вертикальное положение. При подъеме подвески 2 вверх палец 14 рычага 12 входит в зацепление с вырезом в кулачка 10 и при дальнейшем перемещении подвески 2 производится поворот кулачка 10 и барабана 8 на угол 90°. При повороте барабана 8 тяга 7 обкатывается вокруг него и поворачивает барабаны 6 на 180°, поводки 17 перемещают подвижные постоянные магниты вправо и тем самым приводят их во включенное положение. Б этот момент палец 15 достигает верхней стенки паза а.
Пере.мещение подвески 2 прекращается и начинается подъем и последующее транспортирование всего захвата с грузом. Опускание захвата производится до соприкосновения груза с монтажной площадкой. После чего перемещение траверсы 1 прекращается и начинается опускание подвески 2 и рычага 12, палец 14 выходит из зацепления с вырезом в кулачка 10. При достижении подвеской 2 крайнего нижнего положения рычаг 12 под действием пружины 11 принимает вертикальное положение. При следующем подъеме подвеска 2 и рычаг 12 перемещаются вверх, палец 14 входит 1 зацепление с вырезом б кулачка 10 и при дальнейшем перемещении подвески производится поворот кулачка 10 и барабана 8 на угол 90°, при этом поводки 17 перемещают подвижные постоянные магниты влево и тем самым
включают их. Дальнейший цикл повторяется и захват переходит в транспортное положение без груза.
Применение гибких тяг в механизме управления магнитными блоками позволяет
I, производить быструю переустановку магнитных блоков на корпусе захвата при изменении габаритов транспортируемого груза, что расширяет эксплуатационные возможности авто.матического магнитного захвата.
Формула изобретения
Автоматический магнитный захват, содержащий траверсу с установленной на ней с возможностью вертикального перемещения подвеской, расположенные в корпусах блоки постоянных подвижных и неподвижных магнитов, и механизм управления подвижными магнитами, отличающийся тем, что, с целью расширения эксплуатационных возможностей, механизм управления имеет главный барабан и профильный кулачок, закрепленные на траверсе на общей оси, рабочие барабаны, каждый из которых установлен на корпусе блока магнитов посредством осл 0 и гибкими тягами соединен с главным барабаном, и двуплечий рычаг, шарнирно закрепленный на подвеске, одно плечо которого подпружинено, а второе снабжено пальцем, взаимодейству.юц.1,им с вырезами профильного кулачка, при этом ось каждого рабочего барабана имеет поводок для перемещения подвижных магнитов.
Источники информации, принятые во внимание при экспертизе 1. Альбом «Механизация и автоматизация производственных процессов, М., НИИИНФОРМТЯЖМАШ, 1975, с. 18.
А-А
8
77)
/ /
8
m
/ /
/
///////
W
I
77/
фиг. 2
в ид Б
11
12
1
Фиг.З
Вид в
16
Фш.5
Сриг.6
Фиг. 7
Фцг- 9
