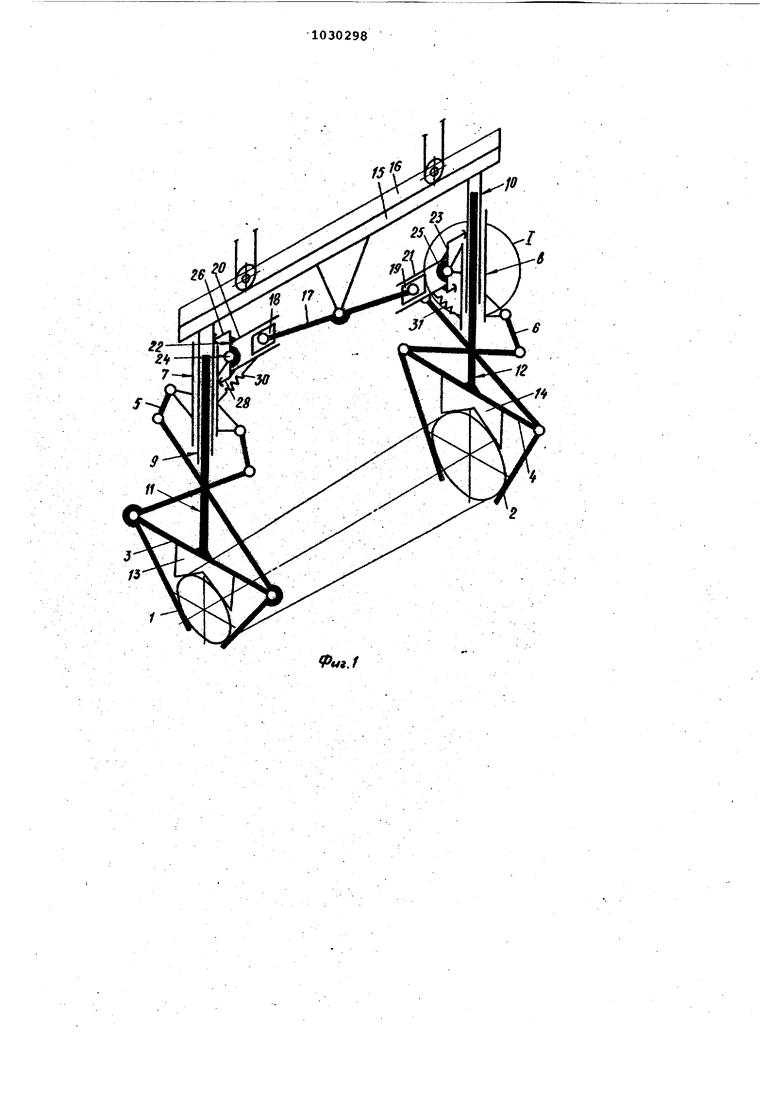
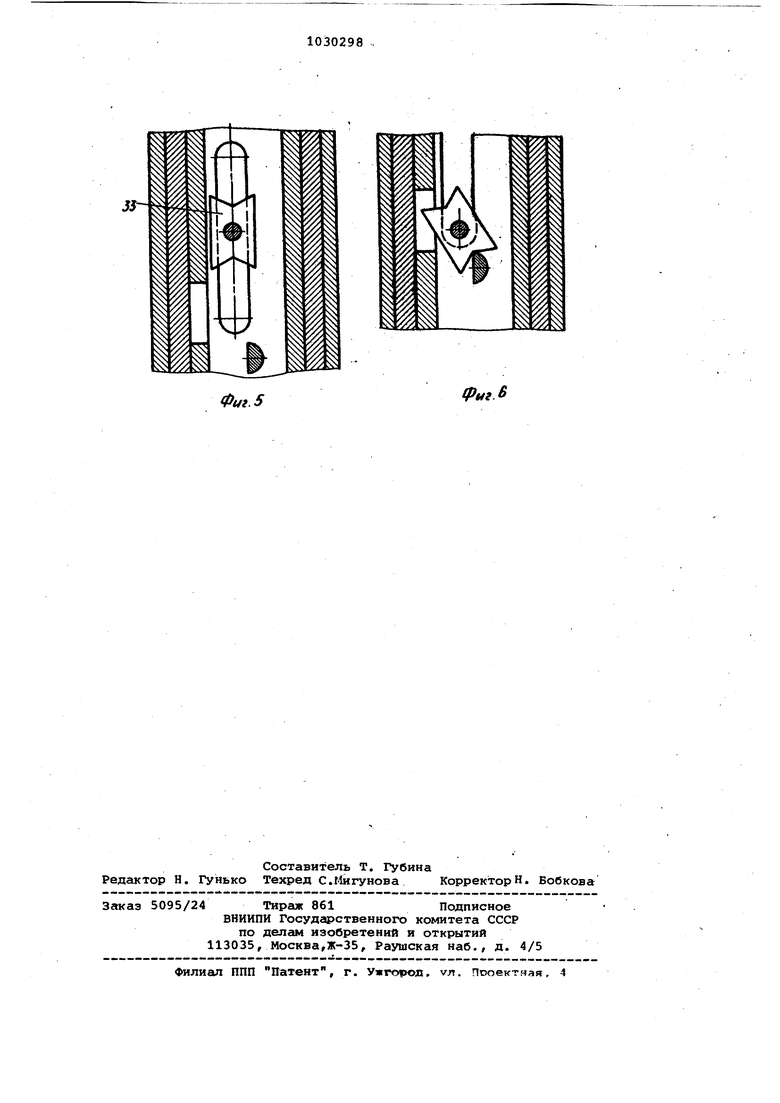
Изобретение относится к погрузочно-разгрузочным работам, в частности, к автоматическим захватным устройствам для длинномерных грузов. Известно автоматическое захватное устройство, содержащее траверсу,наве шиваемую на грузоподъемную машину, две пары захватных рычагов, шарнирно закрепленных на балках и соединенных с траверсой с помощью механизмов фик сации рычагов в раскрытом положении, каждый из которых включает в себя три телескопически связанные между собой полые штанги, наружные из КОТОРЫХ шарнирно связаны посредством тяг с захватными рычагами и снабжены поворотными на осях звездочками, уст новленными с возможностью вэйимодействия с закрепленными на внутренних полых штангах толкателями,, а средние и внутренние штанги выполнены с продольными пазами для размещения оси звёздочки и жестко прикреплены соответственно к балке и траверсе, и шарнирно подвижное к траверсе корО№асло, концы которого шарнирно . связаны с кулисами, установленными в направляющих, закрепленных на наружных штангах С 3 Однако наружные полые штанги имеют возможность свободного скольжения относительно средних штанг. Вследствие этого, при подъеме груза происходит наклон его в ту или инуи сторону в вертикальной плоскости за счет не до вмещения центра тяжести гру за с осью симметрии захватного устрой.ства, кроме того, при транспортировании груза происходит еще и раскачивание его в этой же плоскости за счет сил инерции. Все это отрицатель но сказывается на безопасности в работе. Цель изобретения - повышение безопасности работы. Цель достигается тем, что автоматическое захватное устройство, содер жащее траверсу, навешиваемую на грузоподъемную машину, дв.е пары захватных рычагов, шарнирно закрепленных на балках и соединенных с траверсой с помощью механизмов фиксации рычаго в раскрытом положении, каждый из которых включает в себя три телескопически связанные между собой полые штанги, наружные из которых шарнирно связаны посредством тяг с захватными рычагами и снабженыi поворотными на осях звездочками, установленными с возможностью взаимодействия с закреп ленными на внутре них полых штангах толкателями, а средние и внутренние штанги выполнены с продольными пазам для размещения оси звездочки и жестк прикреплены соответственно к балке и траверсе, и шарнирно подвешенное к траверсе коромысло, концы которого шарнирно связаны с кулисами, установ пенныш в направляющих, закрепленных на наружных штангах, снабжено жестко закрепленными на наружных штангах двуплечими рычагами с выступами на плечах для поочередного взаимодействия со средними и наружными штангами, при этом наружные штанги выполнены с пазами для размещения в них выступов двуплечих рычагов, а направляющие шарнирно закреплены на наружных штангах и подпружинены относительно них. Наличие двуплечих рычагов, взаимодействующих своими плечами то с наружными, то со средними полыми штангами, позволит при подъеме груза жестко зафиксировать наружные полые штанги относительно средних, в свою очередь, жестко закрепленных на траверсе, т.е. зафиксировать груз в горизонтальном положении относительно траверсы и устранить раскачивание груза при транспортировании. На фиг. 1 изображена схема захва тного устройства с захватным грузом; на фиг. 2 - узел 1 на фиг.2} на фиг. 3 - механизм фиксации рычагов захватного устройства в исходном положении; на фиг.4 - то же, в момент установки устройства на груз; на фиг. 5 - то же, в момент подъема груза; на фиг. б - то-же, после опускания груза. Автоматическое захватное устройство содержит (фиг. 1) две пары захватных рычагов 1 и 2, шарнирно закрепленных на балках 3 и 4 и связанных тягами 5 и 6 с наружными полыми штангами 7 и 8 механизмов фиксации рычагов в раскрытом положении. КаждьШ из двух механизмов фиксации рычагов в раскрытом положении содержит также телескопически связанные между собой средние полые штанги 9 и 10 и внутренние полые штанги 11 и 12. Внутренние штанги 11 и 12 жестко закреплены на балках 3 и 4, которые снабжены упорами 13 и 14. Средние штанги 9 и 10 жестко связаны с концами траверсы 15, которая жестко соединена с траверсой 16 грузоподъемной машины. . К траверсе :15 шарнирно подвешено в средней части коромысло 17, которое в свою очередь, шарнирно соединено своими концами с кулисами.18 и 19, перемещающимися в направляющих 20 и 21. Направляющие 20 и 21, на которых жестко закреплены двуплечие рычаги 22и 23, с помощью шарниров 24 и 25 связаны с i наружными. штаНгами 7 .и 8. Двуплечие рычаги 22 и 23 своими плечами 26 и 27 взаимодействуют с одной стороны со средними штангами 9 и 10, ас. другой - плечами 28, и 29 с наружными штангами 7 и 8 механизмов фиксации. Направляющие 20 и 21 связаны также с наружными штангами 7 и 8 с .помощью пружин 30 и 31. В наружных штангах 7 и 8 с по. {лощью осей 32 (фиг.З) подвижно: установлены звездочки 33, взаимодей ствующие с толкателями 34. Толкатели 34 смонтированы на внутренних штангах 11 и 12. Кроме того, на вну ренних штангах 11 и( 12выполнены продольные пазы « и пазы 5, кото рые выполнены в средних ползунах 9 и 10 для прохода осей 32 со звездоч ками 33. Автоматическое захватное устройство работает следующим образом. В исходном положении (фиг. 3) звездочки З3..: пираются в торцы пазов d внутренних штанР 11 и 12, удерживая все телескопически связанные между собой полые штанги обоих механизмов фиксаций в собранном виде, захватные рычаги 1 и 2 . находятся в раскрытом положении.При этом двуплечие, фычаги 22 и 23 плечами 28 и 29 взаимодействуют с наружными штангами 7 и 8с помощью пружин 30 и 31 .(усилие пружин 30 и 31 равно или немного больше массы подвижнйх частей механизмов фиксаций и рычагов). При опускании захватного устройства на груз вначале на больший диаметр груза упором 14 сядет вну ренняя полая штанга 12. При дальней шем опускании устройства коромысло 17 начинает перекашиваться в сторон меньшего Диаметра до тех пор, пока внутренняя штанга 11 упором,13 не сядет На меньший диаметр груза. Траверса 15 еще некоторое время про должает опускаться, воздействуя чер коромысло 17, кулисы 18 и 19,направ ляющие 20 и 21 и шарниры 24 и 25 На наружные штанги 7 и 8, опуская. их вниз. Двуплечие рычаги 22 и 23, упираясь своими плечами 28 и 29 в наружные штанги 7 и 8, препятствуют этому опусканию, звездочки 33- при этом (фиг. 4) разворачиваются и, упираясь в толкатели 34 и торцы пазов а, препятствз т дальней шему опусканию наружных штанг 7 и 8 Устройство готово к подъему груза. При подъеме захватного устройства траверса 15, воздействуя через коромысло 17, кулисы 18 и 19 и направляю щие 20 и 21, на наружные штанги 7 и 8, начинает перемещать их вверх. Звездочки 33 при этом (фиг,. 5), взаимодействуя с торцами пазов « внутренних штанг 11 и 12, разворачиваются и расфиксируют механизмы фиксации рычагов в раскрытом положении. Двуплечие рычаги 22 и 23 продолжают с помощью пружин 30 и 31 плечами 28 и 29 упираться в наружные штанги 7 и .8. При дальнейшем подъеме устройства захватные рычаги 2 начинают сжИматься, захватывая больший диаметр груза (фиг. 1). Так как на этом конце возникает дополнительное сопротивление от груза, то наружная штанга8 одного механизма фиксации прекращает движение, а наружная штанга 7 другого механизма фиксации с помощью коромысла 17 продолжает двигаться вверх до тех пор, пока захватные рычаги 1 полностью не захватят мень- ший диаметр груза. После этого коромысло 17 продолжает движение вверх,. .кулисы 18 и 19 воздействуют на направляющие 20 и 21, которые, преодолевая усилие .пружин 30 и 31, поворачиваются вокруг шарниров 24 и 25, Двуплечие рычаги 22 и 23, поворач ваясь вместе с направляющими 20 и 21,. своими плечами 26 и 27 входят в соприкосновение.со средними полыми штангами 9 и 10, . наружные, штанги 7 и 8 фиксируются посредством двуплечих рычагов 22 и 23 относительно средних штанг 9 и 10, которые жестко закреплены на траверсе. 15. Поэтому груз зафиксирован относительно траверсы 15 в горизонтальном положении. При транспортировке груза (под действием его массы) усилие прижатия двуплечих рычагов 22 и 23 препятствуют скольжению н.аружных штанг 7 и 8 относительно средних штанг 9 и 10, .т.е, препятствует раскачиванию груза. Использование изобретения позволит .транспортировать, груз в фиксиованном горизонтальном положении и убтранить раскачивание груза в вертикальной плоскости,что обеспеит необходимую безопасность при грузоподъемных работах.
г.
/5
17
Фиг. 2

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое захватное устройство для длинномерных грузов | 1980 |
|
SU901232A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Захватное устройство для грузов с отверстиями | 1983 |
|
SU1119966A1 |
| Захватное устройство | 1985 |
|
SU1306887A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Траверса с захватами за бугели | 2016 |
|
RU2652761C1 |
| Грузозахватное устройство | 1984 |
|
SU1237607A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Грузозахватное устройство | 1982 |
|
SU1098896A1 |

АВТОМАТИЧЕСКОЕ ЗАХВАТНОЕ УСТРОЙСТЮ, содержащее траверсу, навешиваемую на грузоподъемную машину, две пары захватных рычагов, шарнирно закрепленных на балках и соединенных с траверсой с помощью механизмов фиксации рычагов в раскрытом положении, каждый из которых включает в себя три телескопически связанные между собой полые штанги, наружные из которых шарнирно связаны посредством тяг с захватн1лми рычагами и снабжены поворотными на осях звездочками,, установленными с возможностью взаимодействия с закрепленными на внутренних полых штангах толкателями, а средние и внутренние ч.штангт1 выполнены с продольными пазами дпя размещения оси звездочки , и жестко прикреплены соответственно ГК б.алке и траверсе, и шарнирно подвешенное к траверсе коромысло, концы которого шарнирно связаны с кулисами, установленгаыми в направляющих, закрепленных на наружных штангах отличающееся тем,что,с :целью повышения безопасности работы, оно снабжено жесткр закрепленными на наружных штангах двуплечими рычагами : с выступами на плечах для поочередного взаимодействия со средними и на ружными штангами, при этом наружные штанги выполнены с пазами для размещения в них выступов двуплечих рычагов, а направляющие шарнирно закреплены на наружных штангах и подпружинены относительно них.
52 33
11
.
Фиг. 5
Фиг В
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство CCG по заявке №2921828/29-11, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
