li
ffi
VI
О
VI
00
VI
Изобретение относится к автоматическим измерениям эксплуатационных характеристик экскаваторного электропривода и, в частности, может быть использовано для автоматического определения неисправности электрической машины экскаваторного электропривода в процессе его эксплуатации.
Известны различные способы контроля параметров экскаваторного электропривода.
Однако известный способ имеет суще- ственный недостаток: при оценке технического состояния щеточно-коллекторного узла используется интегральное значение переменной составляющей пульсаций тока якорной цепи, что не позволяет выявить не- исправность одной или нескольких коллекторных пластин с приемлемой точностью и надежностью.
Наиболее близким к изобретению является способ контроля параметров экскава- торного электропривода, включающий измерение переменной составляющей якорного тока электрической машины, ее фильтрацию, выпрямление и интегрирование, задание предельного значения измеря- емой величины и формирование сигнала неисправности коллектора при превышении измеряемой величиной предельного значения.
Однако известный способ не позволяет с достаточной точностью и надежностью определить неисправность одной или нескольких пластин, характеризующихся высоким уровнем искрения. Кроме того, неисправность может быть определена только на участках электромеханической характери стики, непосредственно прилегающих к точкам излома экскаваторной характеристики.
Цель изобретения - увеличение точности контроля состояния щеточно-коллектор- ного узла.
Поставленная цель достигается тем, что согласно способу контроля параметров экскаваторного электропривода, основанному на измерении переменной составляющей якорного тока электрической машины, ее фильтрации, выпрямлении и интегрировании, задании предельного значения измеряемой величины и формировании сигнала неисправности коллектора при превыше- нии измеряемой величиной предельногд значения, измеряют переменную составляющую напряжения якорной цепи, фильтруют, выпрямляют и интегрируют ее на интервале, принимаемом в пределах 1-10 коллекторных пластин углового перемещения якоря, при принятом режиме работы электромашины, принимают таким же интервал интегрирования переменной составляющей якорного тока, определяютсредние
значения переменной составляющей тока и напряжения на принятом интервале интег1 рирования, определяют среднее значение мощности переменной составляющей якорной цепи на том же интервале интегрирования, а сигнал неисправности коллектора формируют при превышении средним значением мощности переменной составляющей якорной цепи заданного ее предельного значения.
Предлагаемый способ обеспечивает с большей точностью автоматическое определение неисправности щеточно-коллекторного узла и (или) магнитопровода электрической машины за счет измерения среднего значения мощности переменной составляющей якорного тока на интервале 1-10 коллекторных пластин углового перемещения якоря и последующего его сравнения с заданным предельным значением измеряемой величины.
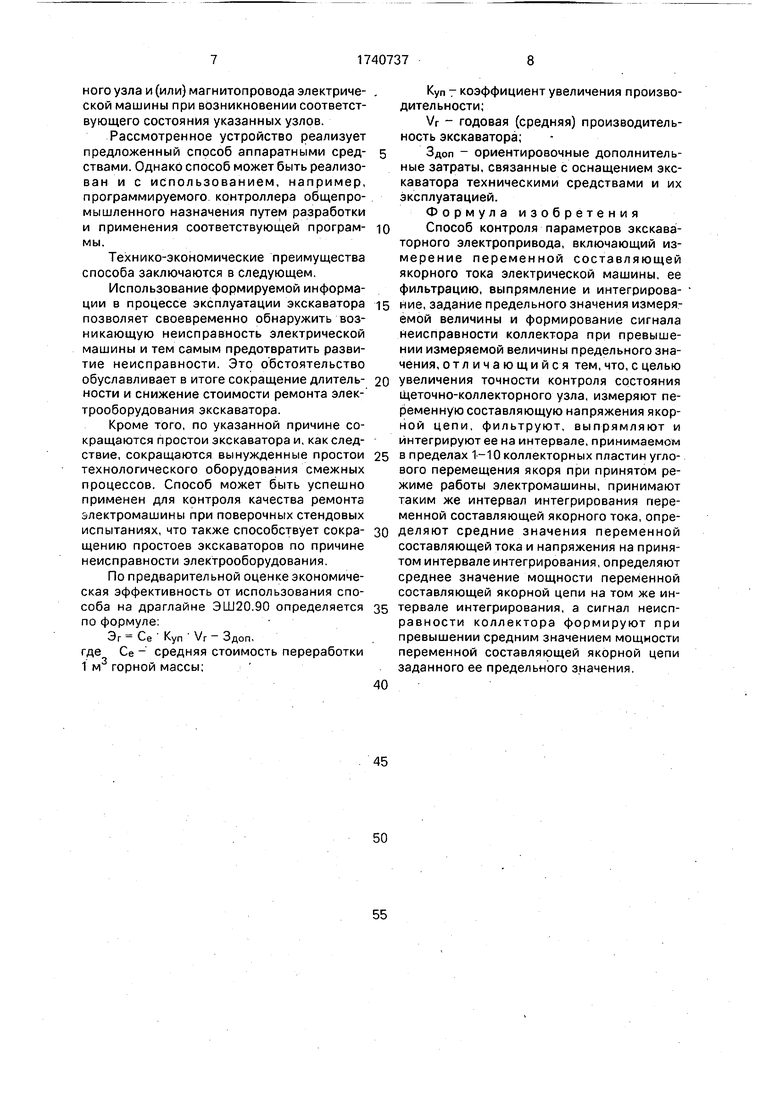
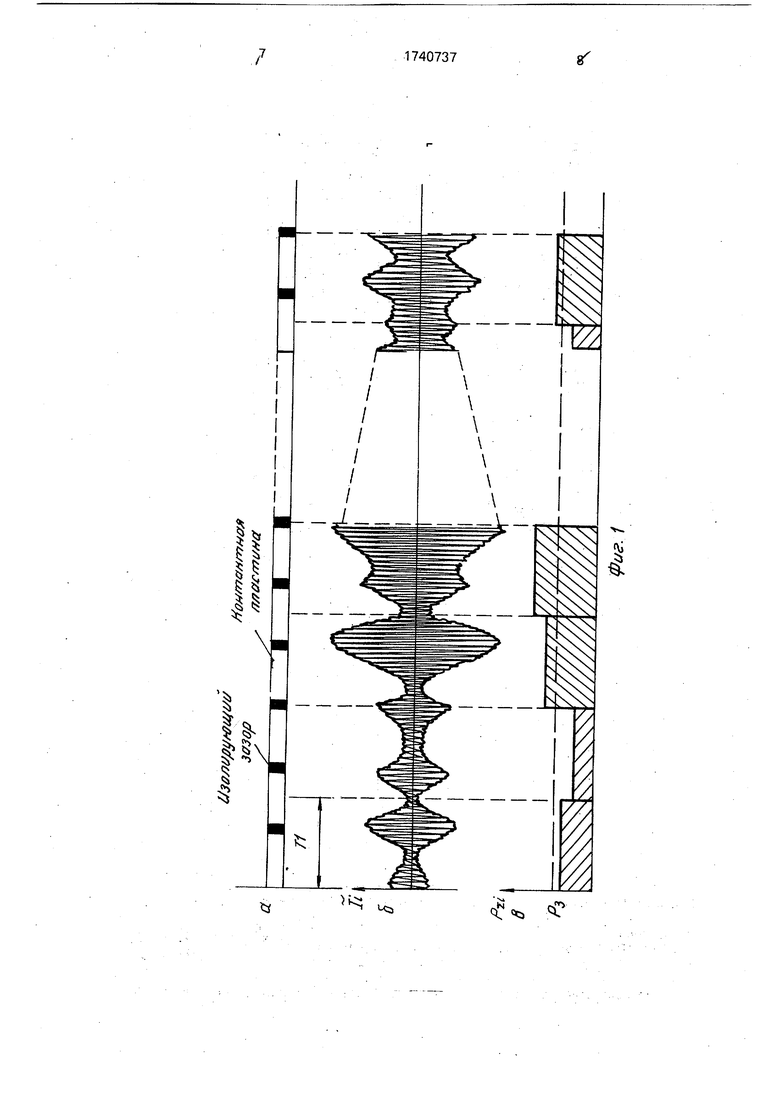
На фиг.1 показан характер изменения мощности переменной составляющей якорной цепи электрической машины; на фиг.2 - структурная схема устройства, реализующего способ контроля параметров экскаваторного электропривода на фиг. 3 а. б, в- структурные схемы функциональных узлоь устройства.
Предлагаемый способ включает следующие основные операции.
Устанавливают интервалы Т1 измерения тока и напряжения переменной составляющей якорной цепи в пределах 1-10 коллекторных пластин углового перемещения якоря при принятом режиме работы электрической машины. Измеряют пере; менную составляющую якорного тока I. электрической машины, а также переменную составляющую напряжения ее якорной цепи Ц. Затем усиливают, фильтруют, выпрямляют переменную составляющую якорного тока электрической машины, т.е. определяют h, а также усиливают, фильтруют, выпрямляют переменную составляю-- щую напряжения якорной цепи электрической машины, т.е. определяют Ц. Интегрируют мгновенные значения выпрямленных переменных составляющих тока h и напряжения б, якорной цепи на интервалах Т1 при работе электрической машины и находят их средние значения:
t2 / l,rft
i -11
T1О)
v,r,
T1
13 .
/ hdt
J2
T1
r
)
где t2 - ti ts - ta ... T1.
Далее определяют на каждом интервале среднюю мощность переменной составляющей якорной цепи
i4i Cfci
$1+1 Jii+1 Ofi+1(3)
и задают предельное значение мощности переменной составляющей якорной цепи
Рз.
Далее формируют сигнал неисправности щеточно-коллекторного узла и (или) маг- нитопровода электрической машины при превышении средним значением мощности переменной составляющей на интервале интегрирования Т1 заданного предельного значения измеряемой величины Р3: М , если Ру Рз
signH рз(4)
/ или .
I 0 в противном случае
Пример технической реализации способа пока.зан на фиг.2, 3.
Устройство содержит узел 1 выделения переменной составляющей тока якорной цепи электрической машины, узел 2 выделения переменной составляющей напряжения якорной цепи, узел 3 интегрирования переменной составляющей тока и определения ее среднего значения, узел 4 интетри- рова.ния переменной составляющей напряжения и определения ее среднего значения, узел 5 определения средней мощности переменной составляющей якорной цепи, узел 6 формирования сигнала неисправности sign H, узел 7 управления, задающий генератор 8. Узлы 1, 2 подключены выходами соответственно к входам узлов 3 и 4, выходы которых подключены к входам узла 5. Выход узла 5 подключен к входу узла 6. Выходы узла 7 связаны с соответствующими входами узлов 3-6. К входу узла 7 подключен выход узла 8.
Узел 1 выделения переменной составляющей тока якорной цепи содержит (фиг.За) узел 9 гальванической развязки электрической цепи, подключенный выходом к усилителю 10, выход которого через фильтр 11 подключен к выпрямителю 12.
Узел 2 выделения переменной составляющей напряжения якорной цепи содержит (фиг.36) узел 13 гальванической развязки электрической цепи, подключен
ный выходом к усилителю 14, выход которого через фильтр 15 подключен к выпрямителю 16.
Узел 5 определения интегральной мощ5 ности переменной составляющей якорной цепи содержит (фиг.Зв) коммутатор 17, выход которого через аналого-цифровой преобразователь 18 подключен к входу цифрового перемножителя 19.
10 Работа устройства. Устанавливают необходимый интервал интегрирования Т1 и предельное значение Рз измеряемой величины - мощности переменной составляющей якорного тока.
15При работе электромашины на входы
узловJ, 2 поступают соответствующие сигналы Ь, Ui, которые преобразуются гальваническими развязками Э, 13 (фиг.За, б) в выходные сигналыТ, Ui. Эти сигналы уси20 ливают я усилителями 10,14 (выходные сигналы Kil,, teUi), фильтруются (фильтры 11, 15, выходные сигналы П , Oi) и выпрямляются (выпрямители 12, 16, выходные сигналы Т,, Ui).
25Выходные сигналы узлов 1, 2, Uj поступают на входы узлов 3, 4, на выходе которых формируются сигналы:
1213
/ lit / Tuft
30 - ч7 2
Т1 ЧГ. Т1
где t2 - ti 1з - t2 ... T1 - формируется узлом управления 7.
Выходные сигналы узлов 3, 4 поступают на входы узла 5 (фиг.Зв), в котором коммутатор 17 периодически подключает к аналогрцифровому преобразователю 18 сигналы и5(,в результате чего на его выходе формируются цифровые эквиваленты указанных сигналов, которые поступают на цифровой перемножитель 19 и на его выходе формируется сигнал (формула 3). Выходной сигнал узла 5 поступает на вход узла 6, которым формируется сигнал неисправности sign H 1, если выполняется условие (4).
Указанная последовательность работы
узлов 1-6 (выполнение операций интегрирования величин Ti, Oi, определение из средних значений, определение Рл на интервалах Т1 и осуществление операции сравнения Р с предельным значением Р3)
обеспечивается узлом 7 управления, взаимосвязанным с задающим генератором 8.
Таким образом, при работе электрической машины автоматически формируется сигнал неисправности щеточно-коллекторного узла и (или) магнитопровода электриче- ской машины при возникновении соответствующего состояния указанных узлов.
Рассмотренное устройство реализует предложенный способ аппаратными сред- ствами. Однако способ может быть реализо- ван и с использованием, например, программируемого контроллера общепромышленного назначения путем разработки и применения соответствующей програм- мы.
Технико-экономические преимущества способа заключаются в следующем.
Использование формируемой информации в процессе эксплуатации экскаватора позволяет своевременно обнаружить возникающую неисправность электрической машины и тем самым предотвратить развитие неисправности. Это обстоятельство обуславливает в итоге сокращение длитель- ности и снижение стоимости ремонта электрооборудования экскаватора.
Кроме того, по указанной причине сокращаются простои экскаватора и, как следствие, сокращаются вынужденные простои технологического оборудования смежных процессов. Способ может быть успешно применен для контроля качества ремонта электромашины при поверочных стендовых испытаниях, что также способствует сокра- щению простоев экскаваторов по причине неисправности электрооборудования.
По предварительной оценке экономическая эффективность от использования способа на драглайне ЭШ20.90 определяется по формуле:
Эг Се Куп Vr - Здоп,
где Се - средняя стоимость переработки 1 м горной массы;
Куп - коэффициент увеличения производительности;
Vr - годовая (средняя) производительность экскаватора;
Здоп - ориентировочные дополнительные затраты, связанные с оснащением экскаватора техническими средствами и их эксплуатацией.
Формула изобретения
Способ контроля параметров экскаваторного электропривода, включающий измерение переменной составляющей якорного тока электрической машины, ее фильтрацию, выпрямление и интегрирование, задание предельного значения измеряемой величины и формирование сигнала неисправности коллектора при превышении измеряемой величины предельного значения, отличающийся тем, что, с целью увеличения точности контроля состояния щеточно-коллекторного узла, измеряют переменную составляющую напряжения якорной цепи, фильтруют, выпрямляют и интегрируют ее на интервале, принимаемом в пределах 1-10 коллекторных пластин углового перемещения якоря при принятом режиме работы электромашины, принимают таким же интервал интегрирования переменной составляющей якорного тока, определяют средние значения переменной составляющей тока и напряжения на принятом интервале интегрирования, определяют среднее значение мощности переменной составляющей якорной цепи на том же интервале интегрирования, а сигнал неисправности коллектора формируют при превышении средним значением мощности переменной составляющей якорной цепи заданного ее предельного значения.
ч
л
/V
л
(V
U:
П
Фиг 2
Sio/l H

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля параметров экскаваторного электропривода | 1988 |
|
SU1587151A1 |
| Способ мониторинга вибрации щеточно-коллекторных узлов электродвигателей постоянного тока | 2019 |
|
RU2730109C1 |
| Способ контроля параметров экскаваторного электропривода | 1986 |
|
SU1370198A1 |
| СПОСОБ КОНТРОЛЯ ИЗНОСА ЩЕТОК И РАБОТЫ ЩЕТОЧНО-КОЛЛЕКТОРНОГО УЗЛА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2013 |
|
RU2548020C2 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Энергетическая установка | 1988 |
|
SU1561187A1 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| МАШИНА ПОСТОЯННОГО ТОКА | 2010 |
|
RU2442271C1 |
| УСТРОЙСТВО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2526500C1 |
| Способ контроля многополюсных машин постоянного тока с волновой обмоткой якоря | 1980 |
|
SU918900A1 |
Устройство, поясняющее способ, содержит узел 1 выделения переменной составляющей тока якорной цепи, узел 2 выделения переменной составляющей напряжения якорной цепи, узел 3 интегрирования переменной составляющей тока и определения ее среднего значения, узел 4 интегрирования переменной составляющей напряжения и определения ее среднего значения, узел 5 определения средней мощности переменной составляющей тока, узел 6 формирования сигнала неисправности, узел 7 управления 1-3-5-6, 2-4-5-6, 8-7-5-6. 3 ил. Ё
| Гаврилов В.Д., Потапов В.Н | |||
| Критерии оценки технического состояния скользящего контакта электрической машины постоянного тока | |||
| - В сб | |||
| научн | |||
| трудов: Повышение эффективности эксплуатации авиационного и радиоэлектронного оборудования гражданской авиации, Рига, 1987 | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
| Состав для реагентной разглинизации скважины | 1988 |
|
SU1587181A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
