определяют соответствующие им ординаты образукяцей предотвала с учетом текущих значений координат движущегося ковша, угла поворота с.трелы относительно оси выработки и угла на,клона поворотной платформы, сравнивают текущие значения ординат ковша с соответствующими значениями ординат образующей предотвала и по результату сравнения конт- i ролируют угол откоса предотвала.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения угла откоса предотвала | 1980 |
|
SU939656A1 |
| Способ учета основных показателей работы экскаватора-драглайна | 1979 |
|
SU1036850A1 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1987 |
|
SU1585462A1 |
| Способ измерения количества работы выполненной экскаватором-драглайном | 1982 |
|
SU1097765A1 |
| Способ определения положения экскаватора-драглайна в пространстве | 1983 |
|
SU1121356A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ оперативного измерения производительности экскаватора-драглайна | 1983 |
|
SU1084393A1 |
| Способ автоматического учета основных показателей работы драглайна | 1986 |
|
SU1421830A1 |

СПОСОБ КОНТРОЛЯ УГЛА ОТКОСА ПРИ ИСПОЛЬЗОВАНИИ ДРАГЛАЙНА, включающий измерение длин свешивающихся частей тягового и подъемного канатов драглайна, токов якорных цепей двигателей механизмов подъема и тяги, а также угла поворота стрелы относительно оси выработки, отличающийся тем что, с целью повьшения надежности и упрощения контроля, измеряют ток цепи возбуждения двигателя механизма подъема и определяют началб операции черпания при одновременцом выполнении условий 5. 0.5Ро . Н.Ъ..Ъ.Ъ. gn.ОТНН SiC T -Ь где 5 ; усилие в подъемном канате} вес порожнего ковша; о ot угол поворота стрелы относительно оси выработки ..э.э начало и конец зоны заполнения ковша; - сигнал вращения двигателя механизма тяги в направлении, обеспечивак щем наматывание каната на барабан; S;gj,TT - сигнал увеличения якорного тока с двигателя тяги, измеряют ток якорной цепи двигателя механизма поворота платформы и угол наклона поворотной платформы в вертикальной плоскости .стрелы и определяют в процессе черпания текущее значение координат движущегося ковша в плоскости стрелы через интервалы времени в зоне образующей предотвала по длинам тягового и подъемного канатов с учетом угла наклона поворот(Л ной платформы при условии J/ 0,71,,,, 0,2Эп.„ом tioB- где, .3.,, Л - номинальные якор-i T.hoMif..KoM; ные токи двигателей механизмов тяги, подъема ковша, поворота стрелы; ср .ср ср J ,J ,«Jnj,g средние, якорные тот / ( 5 ки двигателей механизмов тяги, подъ емаковша, поворота стрелы; II минимальное и макОБр.МиН ) ОБр. Vqicc. с симальное значения абсциссы образующей предотвала; ,продольная координата ковша в вертикальной плоскости стрелы, /
Изобретение относится к области измерения параметров технологических схем при ведении вскрышных бестранспортных работ с применением экскаваторов-драглайнов.
Известен способ контроля угла откоса предотвала при использовании драглайна, включающий измерение длин тягового и подъемных канатов, скорости вращения валов приводив механизмов тяги и подъема, задание границ опасных зон, прогнозирование траектории перемещений ковша с учетом его динамических свойств и формирование сигнала нахождения ковша в опасной зоне ij .
Наиболее близким к изобретению по технической сущности является способ контроля угла откоса при использовании драглайна, согласно которому измеряют длины свешивающихся частей тягового л подъемного канатов, токи якорных цепей двигателей механизмов подъема и тяги, а также угла поворота стрелы относительно оси выработки, контролируют выполнение операции разгрузки ковша. Способ обеспечивае;т учет объема переваленного грунта, учет суммарного угла поворота платформы при переносе груженого ковша и длительности полезной работы ., 2 .
Однако известный способ не поз- . воляет в Процессе эксплуатации просто и надежно определять нарушение заданного угла откоса предотвала, исполнение которого обуславливается требованиями безопасного ведения экскаваторных работ и технико-экономическими показателями процесса экскавации.
Цель изобретения - повышение надежности и упрощение контроля угла откоба предотвала.
Поставленная цель достигается тем, что согласно способу контроля угла откоса при использовании драглайна, включающему измерение длин свешивающихся частей тягового и подемного канатов драглайна, токов якорных цепей двигателей механизмов подъема и тяги, а также угла поворота стрелы относительно оси выработк измеряют ток цепи возбуждения двигателя механизма подъема.и определяют начало операции черпания при одновременном выполнении условий. %, 0,5Р„
Н.У 3 - i -К.З i
DTH 1УТТ 1
5и: усил11е в подъемном канате;
где -hi
РО ОС, вес порожнего ковша; угол поворота стрелы относительно оси выработки; c.f,5,it. начало и конец зоны заполнения ковша;
5, сигнал вращения двигателя механизма тяги в направлении, обеспечивающем наматывание каната на барабан; сигнал увеличения якорного
тока с двигателя тяги, измеряют ток якорной цепи двигателя механизма поворота платформы и угол наклона поворотной платформы в вер.тикальной плоскости стрелы и определяют в процессе черпания текущее значение координат движущегося ковша в плоскости стрелы через интервалы времени в зоне образующей пред отвала по длинам тягового и подъемного канатов с учетом угла наклона поворотной платформы при условии ,7 J,.,
Д JT.HOM 0,2:.„.,ц
-РОВ. НОМ
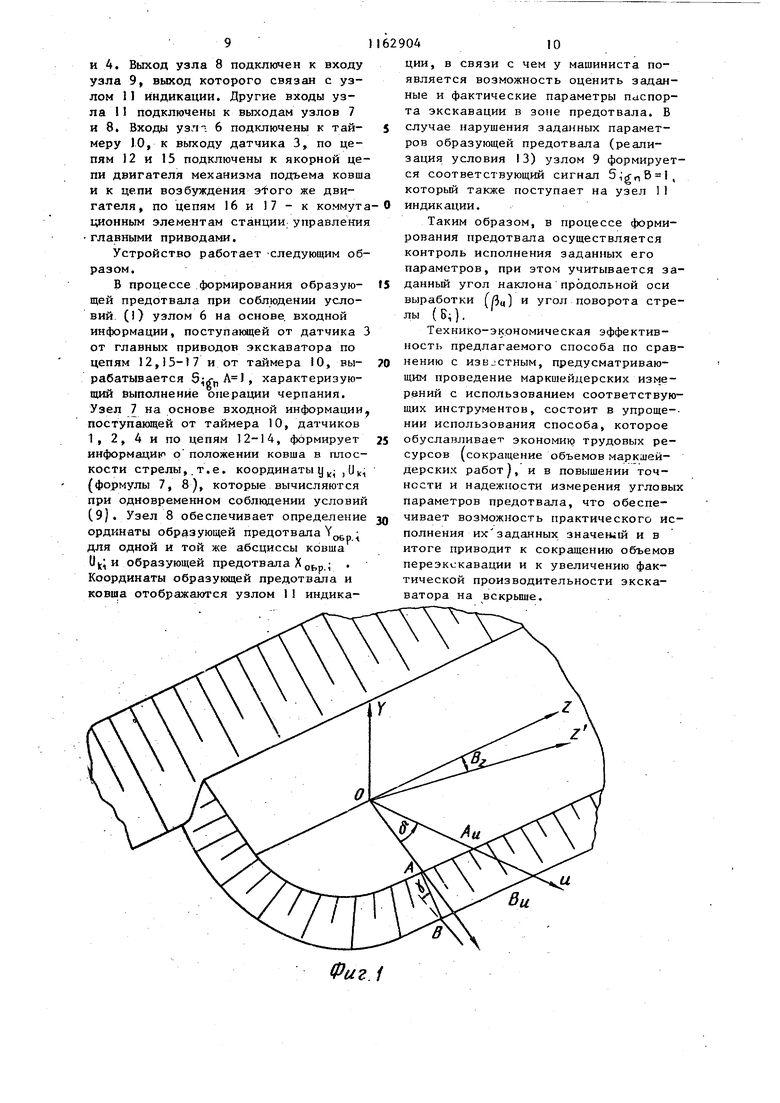
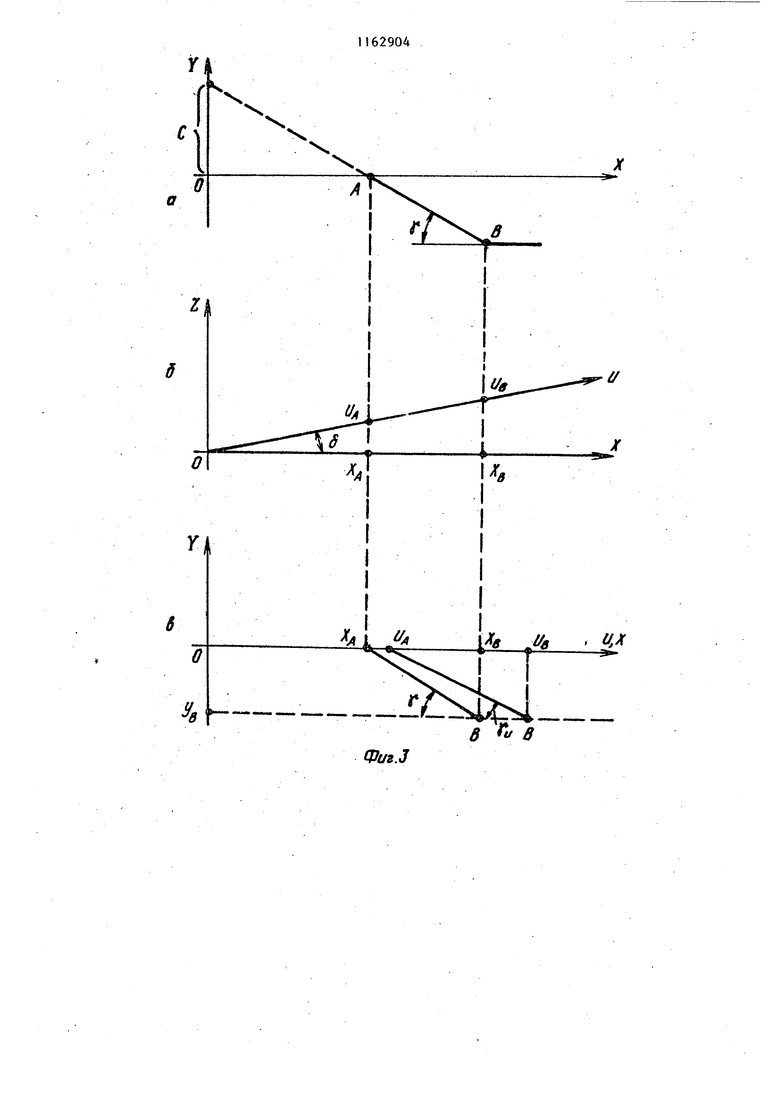
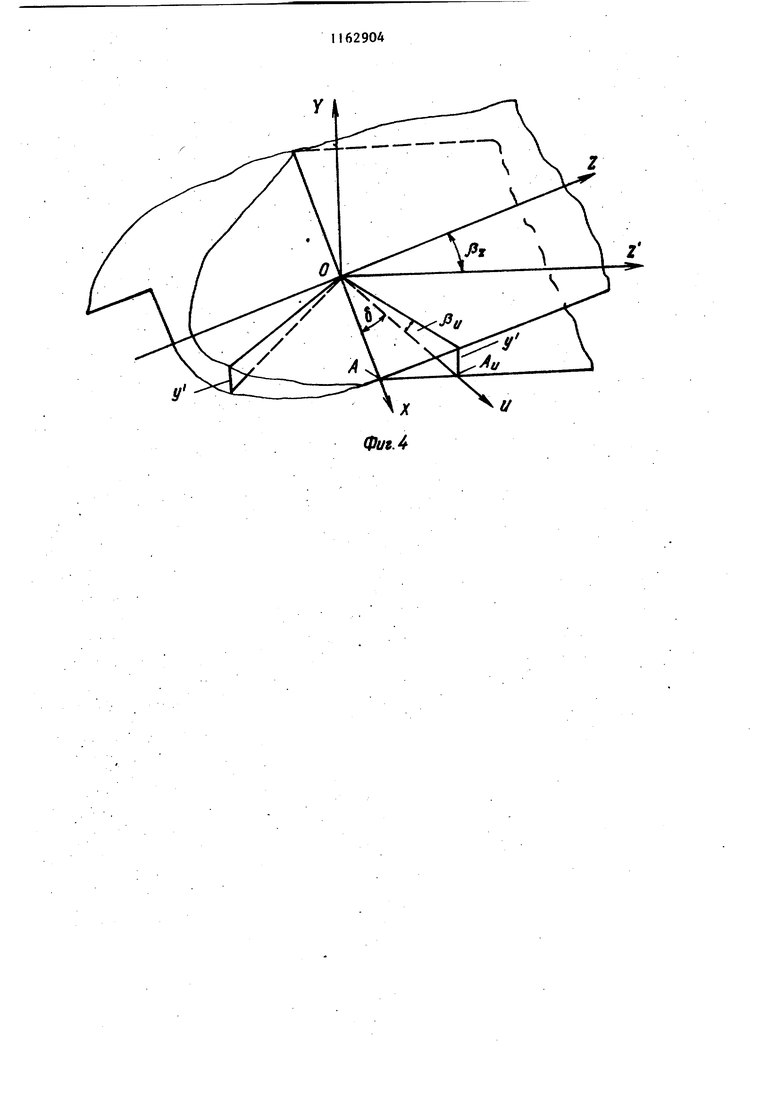
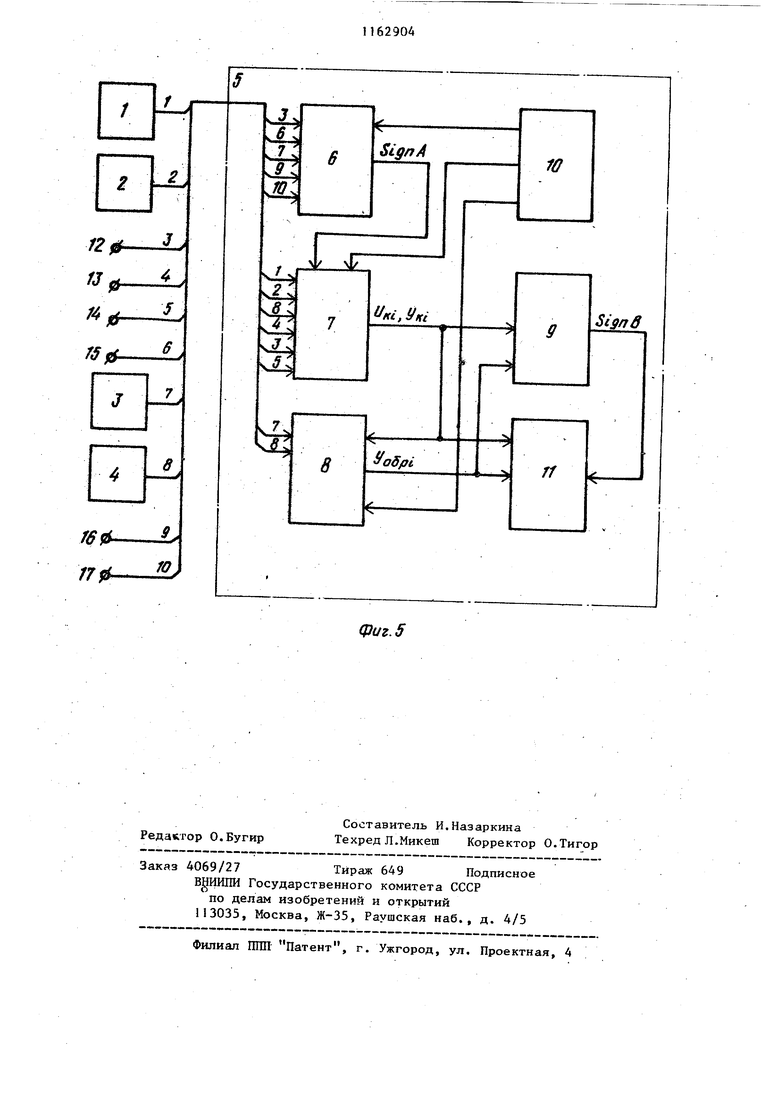
. мин - с Обр.ллахс номинальные якор Т.НОМ н.ЦоИ ) UOB.HOJ ные токи двигате лей механизмов тяги, подъема ковша, поворота стрелы; .з.з средние якорные токи двигателей механизмов тяги, подъема ковша, поворота стрелы; минимальное и ОБр. |«ЛИЦ г Обр, ЧОКС максимальное зна чения абсциссы об разующей предотвала; - продольная координата ковша в .вертикальной пло кости стрель, определяют соответствующие им ординаты образующей преДотвала с учетом текущих значений координат движущегося ковша, угла поворота стрелы относительно оси выработки и угла наклона поворотной платформы, сравнив.ают текущие значения ординат ковша с соответствующими значениями ординат образующей предотвалаи по результату сравнения контролируют угол откоса предотвала. : Предлагаемый способ обеспечивает в процессе формирования образующей предотвала определение факта нарушения ковшом установленной границы предотвала, при этом учитываются угол поворота вертикальной плоскости стрелы относительно оси выработки и угол наклона продольной оси выработк Все это позволяет ма1-чнисту экскаватора производить заоткоску предотвалакак со стороны параллельной оси . выработки, так и с торцовой стороны предотвала. На фиг, I показана схема расположения экскаватора на предотвале; на фиг. 2-4 - расчетные для опреjделения ординат образующей предотвала; на фиг. 5 - структурная схема устройства, реализующего способ контроля угла откоса предотвала. Предлагаемый способ включает следуювще основные операции: измерение длины свешивающихся частей,тягового и подъемного канатов ;измерение токов якорных цепей двигателей механизмов подъема и тяги ковша, поворота стре лы; измерение токов цепи возбуждения 4 ля- механизма подъема изме- гла поворота стрелы, относиоси выработки; измерение угла поворотной платформы в верой плоскости стрелы; определеала операции черпания 5 ,, А I овременном выполнении усло5п О,5Ро .., 3 :у; c«J If 3 3 DTH 1 V(I) УТТ 1 J , - усилие в подъемном канате 2-С -1 -n hi машинная постоянная двигагателя механизма подъема ковша; средние значения тока цепи якоря и магнитного потока двигателя механизма подъема ковша; диаметр барабана лебедки ме ханизма подъема ковша; вес порожнего ковша const), .; (ьч магнитньй поток насьш ения двигателя механизма подъема постоянная характеристики намагничивания двигателя механизма подъема, / Ьг возбуждения дви1-ателя : механизма подъемаинтервал интегрирования, icoторьй принимается в пределах 1-5 с и обеспечивает достаочное затухание колебательых процессов в системе ковшривод;исло интервалов интегриро ния, U J - ток цепи якоря двигателя механизма подъема. ие величины тока цепи возподъемного двигателя Т й цепи J -определяются при ii-S, ( TI среднее значение втогде J рой производной якорного тока Лц- двигателя подъема на интервале С - допустимый уровень пере ходных процессов в системе ковш-привод; KiiSi if j зчало и конец зоны заполнения ковша; Л - угол поворота стрелы от носительно оси выработк 5 „БТ«Исигнал вращения двигателя механизма тяги в направлении, обеспечива канат ющем наматывание на барабан; сигнал увеличения якор ного тока двигателя тяги, . В процессе черпания определяют текущие значения координат движущегося ковша в плоскости стрелы через интервалы &.i в зоне образующей предотвала по формулам U iLii kllil ijni 2 1sio(ec(ii liikiii V cos(E, + ), CosUc l u) ( ь4(,)2 ш J -sin () ;при условии I/ 5 0,2 I пов.ном. обр. М(и . моте. :гдеу,;,и вертикальная и продоль ная координаты ковша в вертикальной плоскости стрелы;. и U минимальное и максимал 0(1ЯШ, Обрмак ное значения абсциссы образующей предотвала; П высота и радиус вращени точки схода подъемого f каната с .направляющего шкива относительно оси экскаватора; расстояние между точками схода тягового и подъемного канатов с направляющих шкивов; 6 , длины свешивающихся частей подъемного и тягового канатов; угол наклона стрелы к горизонту; рц - угол наклона поворотной платформы зкскаватора к горизонту; .ном)пов. якорные токи двигателей механизмов тяги, подъема ковша v,cp ср поворота стрелы; r .-пой средние якорные токи двигателей механизмов тяги, подъема ковша, ворота стрелы , ta Vt. , 1 средний и мгновенньй якорные токи соответствующего привода (тяги, подъема и поворота ; tj-t,- интервал интегрирования, который принимается в пределах 1-5 с еляют соответствующие им ординабразующей предотвала по формулам (-4r 6S;-u,;4c.u,,-tgp).jo6p,,ncCOB S; 270° 6 Si ЗбО, у - угол наклона образующей к горизонту; угол поворота стрелы от перпендикулярного направления к бровке уступа; постоянный член управления образующей (фиг.За), ролируют путем сравнения текущеначения ординаты ковша с сооттвующим значением ординаты преда и формируют сигнал нарушения зующей предотвала IK; Чобр; . (13) пя контроля заданньи координат ующей предотвала АВ при располой вертикальной оси экскаватора чке О на наклонной оси выработки Z (фиг.1) необходимо определить зн чения ряда параметров, по которым могут быть определены координаты ковша по формулам (7) и (8)., Из фиг,2 следует, что , (14) ML-L«O-KT;, (15) очевидно U,;-r,-L;;.J;V (19) CL ;-5i«e,.(201 Ji J; С05 ty(21) L, СобЕ ,(22) J (3; %ine ,(23) yic; n ni °s (4) , Чк; г„-1„,со5е-к 5;ле,(25) . , ... Л26) Тогда после подстановки в (24) и (25) выражений (16) и (17) получим формулы для определения координат ковша (7) -и (8), . Условия (9) обеспечивают допустимые провисания свисающих частей тягового и подъемного канатов и нахождение центра тяжести ковша в вер тикальной плоскости стрелы. Формулы (11) и (12) для определе ния ординаты образующей пред от в ал а. в плоскости С1релы при различных уг лах ее поворота по отношению к бров ке предотвалс MotyT быть выведены следующим образом: из фиг.За следуе что уравнение образующей предотвала АВ в плоскости XOY имеет вид )оБр К обр+С, , у - угол откоса предотвала в сечении, перпендикулярном оси выработки. Очевидно, в плоскости 20Х (фиг,3 координаты точек А, В образующей вы ражаются как у (28) ( где 8 - угол поворота вертикальной плоскости стрелы (You от перпендикулярного на904 ,8 правления к бровке уступа (ось X) , Следовательно, образующая предотвала при повороте платформы зкскаватрра на угол о изменяется по виду (фиг.Зв), при этом Чв-Уд g fu-|рГи7 05 S J (30) . так ,у 1)д , а величины (J в , UA , определены выражениями (.28) и (29). Из фиг. 4, на которой приведены взаимно пересекающиеся горизонт%льная плоскость 71ОХ и наклонная плоскость горной выработки 20Х , следует, что угол наклона продольной оси выработки Bg в плоскости стрелы равен п (31) . V В связи с этим ордината точки образующей предотвала изменяется на величину Ij (в данном случае при изменении 8 в пределах OiS-i 90° - Уве-, личивается, при изменении в пределах 8 360° - уменьшается. Я (32) Тогда с учетом (28) - (32) выражение (27) преобразуется в (П), Б области 270° 5 360 , где образующая предотвэла имеет одинаковое выражение как в плоскости XOY , так ив плоскости UoY , выражение (27) принимает вид (1г). Устройство для реялизации предполагаемого способа содержит, .датчики длины подъемного 1 и тягового 2 канатов, угла поворота стрелы 3, наклона платформы 4, вычислитель 5, который содержит узел 6 определения начала операции че рпанйя, узел 7 определения координат движущегося ковша, узел 8 определения ординат образующей предотвала, узел 9 сравнения, таймер 10, узел П индика.цин. Выход узла 6 связан с входом узла 7, другие входы которого подключены к выходам датчиков 1, 2 и 4, к выходу таймера 10, а по цепям 12-14 - к якорным цепям главных приводов экскаватора. Выход узла 7 подключен к входам узлов 8 и 9. Другие входы узла 8 подключены к выходу таймера 10 и к выходам датчиков 3
и 4. Выход узла 8 подключен к входу узла 9, выход которого связан с узлом 11 индикации. Другие входы узла 1 1 подключены к выходам узлов 7 и 8. Входы узл 6 подключены к таймеру 10, к выходу датчика 3, по цепям 12 и 15 подключены к якорной цепи двигателя механизма подъема ковша и к цепи возбуждения же двигателя, по цепям 16 и J7 - к коммута ционным элементам станции управления главными приводами.
Устройство работает -следующим образом.
В процессе формирования образующей предотвала при соблюдении условий. (О узлом 6 на основе, входной информации, поступакщей от датчика 3 от главных приводов экскаватора по цепям 12,15-17 и от таймера 10, вырабатывается , характеризующий Выполнение операции черпания. Узел 7 на основе входной информации, поступающей от таймера 10, датчиков 1, 2, 4 и по цепям 12-14, формирует информацию о положении ковша в плоскости стрелы,, т.е. координаты у ,- ,U)(, (формулы 7, в), которые вычисляются при одновременном соблюдении условий (9). Узел 8 обеспечивает определение ординаты образующей предотвала Y
OSp.-l для одной и той же абсциссы ковша и образующей предотвала ,- . Координаты образующей предотвала и ковша отображаются узлом 11 индикации, в связи с чем у машиниста появляется возможность оценить заданные и фактические параметры паспорта экскавации в зоне предотвала. В случае нарушения заданных параметров образующей предотвала (реализация условия 13) узлом 9 формируется соответствующий сигнал 5igriB l, который также поступает на узел 11 индикации.
Таким образом, в процессе формирования предотвала осуществляется контроль исполнения заданных его параметров, при этом учитывается заданный угол наклона продольной оси выработки (/Зц и угол поворота стрелы ( 8,),
Технико-экономическая эффективность предлагаемого способа по сравнению с известным, предусматривающим проведение маркшейдерских измерений с использованием соответствующих инструментов, состоит в упроще-НИИ использования способа, которое обуславливает экономик трудовых ресурсов (сокращение объемов маркшейдерских работ, и в повышении точности и надежности измерения угловых параметров предотвала, что обеспечивает возможность практического исполнения их заданных значенлй и в итоге приводит к сокращению объемов переэкскавации и к увеличению фактической производительности экскаватора на вскрьш1е.
Фиг. 1
фиг. 5
| J | |||
| Устройство для контроля положенияКОВшА эКСКАВАТОРА-дРАглАйНА | 1979 |
|
SU827709A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УЧЕТА ОСНОВНЫХ ПОКАЗАТЕЛЕЙ РАБОТЫ ДРАГЛАЙПА | 0 |
|
SU343043A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
