рости вращения якоря двигателя в пределах от нуля до 0,05 скбрости холостого хода, сравнивают среднее значение измеренного на интервале At уровня искрения коллектора электродвигателя с заданными для ука- занных зон номинальными значениями уровней искрения и по результатам сравнения судят о неисправности электродвигателя.
Способ включает следующие основные 1
операции.
Определяют режим работы электропривода на внешней электромеханической характеристике, например, по положению командоаппарата управления электродви- гателем. Измеряют скорость.вращения вала привода П| при его работе на внешней характеристике. Измеряют ток в якорной цепи электродвигателя при работе электропри- вода на внешней характеристике. Опреде- ляют на дискретных временных интервалах замедление на валу электропривода, работающего на внешней характеристике, по формуле;
nti Ч-1 - п ti/чч,
ati - r : rv-;
где nti, nti+1 - скорости вращения вала электропривода в моменты tj, ti 4-1:
ti+1-ti const - интервал дифференциро- вания скорости вращения вала электропривода.
Определяют момент прохождения точки излома внешней экскаваторной скоростной характеристикип ti + 1 - п ti о г- / t + i JL N (2) V -ti /
з.
ti + 1-ti tj-bi-tj
Измеряют в зоне излома скоростной характеристики фактическую скорость вращения вала электропривода п, Измеряют в зоне излома скоростной характеристики фактический ток в якорной цепи электро- двигателя 1. Измеряют в зоне излома ско- ростной характеристики уровень переменной составляющей якорного тока электродв1/1гателя Т. Определяют зону сто- порного момента скоростной характеристики sign , если
О П1 0,05п XX /з
0, 0,95
или
О П1 0,5пхх1
1,,м 1| Т. где Пхх - скорость вращения вала двигателя при токе в цепи якоря, близком к нулю (
рость холостого хода);
i I ном - фактический и номинальный стопорные токи.
Измеряют в зоне стопорного момента скоростной характеристики уровень переменной составляющей якорного тока электродвигателя 5 Задают интервал усреднения At и определяют среднее значение уровней переменных составляющих якорного тока электродвигателя в зонах излома и стопорного момента скоростной характеристики
IK
/l$ldt
Ти tH
|ф
tK - tH
tK .
/I|.i dt
(5)
(6)
tк
tK -tH
tH At- интервал интегрирования:
tH,tK - моменты начала и окончания интегрирования.
Устанавливают допустимые уровни переменной составляющей якорного тока в зонах излома скоростной характеристики 1доп и стопорного момента Тдоп. Определяют сигнал неисправности электропривода в процессе его эксплуатации sign , если
п(0,,95)пйом(7)
или
l(0,9f 0,95)1 Ком,(8)
или
nti 0,05ПХХ1/дЧ
или
или
1 (0,9г 0,95)
nti 0,05пхх
1 (1,05f1,1)
7и -.ти |ф, - 1доп ,
},
(10)
(11)
или
Г
1доп , (42)
где пКом.I ном - номинальные скорость вращения вала и ток якорной цепи электродвигателя в зоне излома скоростной характеристику;
Тф ,Тф- средние значения переменной .составляющей якорного тока электродвигателя в зонах излома и стопорного момента скоростной характеристики;
1доп , Тдоп - допустимые уровни перемен- менной составляющей якорного тока в зонах излома скоростной характеристики и стопорного момента.
При работе коллекторного электродвигателя постоянного тока в якорной цепи возникает переменная составляющая.
которая, в свою очередь, содержит гармоническую составляющую с основной частотой fi pn/60,где р- число пар полюсов; п - число рборотов якоря: гармоническую пульсирующую составляющую с основной частотой f2 zn/60, где Z - число зубцов якоря; Сармо- ническую составляющую с коллекторной частотой f3 kn/60, где k - число коллекторных зубцов; гармонические, обусловленные напряжением в месте разрыва контакта коммутируемых секций f4 30 кГц.
Изменение перечисленных переменных составляющих якорного тока в течение одного оборота якоря характеризует действие на эти переменные соответствующих неисправностей электродвигателя (отклонений от номинальных значений), составляющая с частотой fiхарактеризует состояние магнитной цепи электродвигателя (обмоток возбуждения, состояние магнитопривода и его элементов), составляющая f характеризует состояние подшипников электродвигателя, щеткодержателя, щеток, коллектора и т.д. .
Следовательно, интегральное значение величины выпрямленной переменной составляющей якорного тока электродвигателя в диапазоне частот fi- f на интервале интегрирования Д t (например, в течение одного оборота якоря) характеризует состояние электродвигателя.
Для определения недопустимого уровня переменной составляющей можно воспользоваться следующим приемом. При стендовых испытаниях исправного двигателя определяется номинальный уровень переменной составляющей якорного тока в установленных зонах рабочих параметров электродвигателя - в зоне излома скоростной характеристики и в зоне стопорного момента. Недопустимый уровень переменной составляющей определяется путем увеличения номинального уровня в соответствии с рекомендациями, например, по ГОСТу 19705-81 и ГОСТу 183-74.
Измерение переменной составляющей якорного тока электродвигателя в широком диапазоне fi-f4 позволяет обнаруживать практически все виды неисправностей электродвигателя, однако для накопления достоверных данных для принятия решения о неисправности следует существенно увеличить период интегрирования переменной составляющей по сравнению с тем случаем, когда оценка производится по одной из составляющих, т.е. при определении неисправностей электродвигателя ограниченного
числа видов требуется меньшее время, чем при определении неисправностей всех видов (при одинаковом уровне значимости показателей). Поэтому определение неисправности электродвигателя в частотном диапазоне f4 30-50 кГц уменьшает запаз5 дывание при формировании сигнала неисправности, при этом учитываются основные виды неисправностей двигателя; износ подшипников, щеток, коллектора, неисправность щеткодержателя,
10 Таким образом, определение уровня переменной составляющей якорного тока в зонах излома и стопорного момента скоростной экскаваторной характеристики позволяет своевременно выявлять
15 неисправности электродвигателя и предотвращать их развитие до уровня, который контролируется известным способом. Это снижает длительность и стоимость ремонта экскаваторного электропривода, что в итоге
20 обуславливает повышение эксплуатационной производительности экскаваторов.
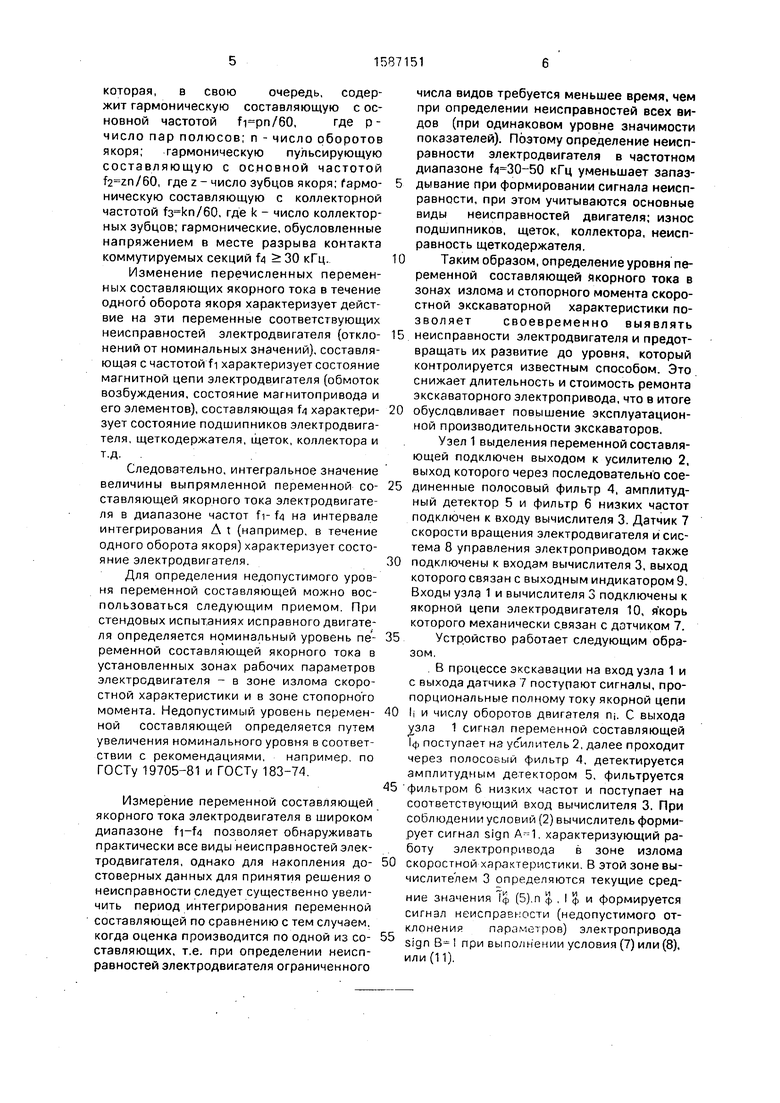
Узел 1 выделения переменной составляющей подключен выходом к усилителю 2, выход которого через последовательно сое25 диненные полосовый фильтр 4, амплитудный детектор 5 и фильтр 6 низких частот подключен к входу вычислителя 3. Датчик 7 скорости вращения электродвигателя и система 8 управления электроприводом также
30 подключены к входам вычислителя 3, выход которого связан с выходным индикатором 9. Входы узла 1 и вычислителя 3 подключены к якорной цепи электродвигателя 10, я корь которого механически связан с датчиком 7.
35Устройство работает следующим образом.
. В процессе экскавации на вход узла 1 и с выхода датчика 7 поступают сигналы, пропорциональные полному току якорной цепи
0 1| и числу оборотов двигателя г. С выхода ;зла 1 сигнал переменной составляющей 1ф поступает нз ус и/1итель2, далее проходит через полосоБый фильтр 4, детектируется амплитудным детектором 5, фильтруется
5 фильтром 6 низких частот и поступает на соответствующий вход вычислителя 3, При соблюдении условий (2) вычислитель формирует сигнал sign А-1. характеризующий работу электропривода в зоне излома
0 скоростной характеристики. В этой зоне вычислителем 3 определяются текущие средние значения Тф (5),п ф , I ф и формируется сигнал неисправности (недопустимого от- клонения параметров) электропривода sign В 1 при выполнении условия (7) или (8), или (11).
сЕсли электропривод работает в зоне стопорного момента, то вычислителем 3 формируется sign при выполнении условия (3) или (4). В этом случае определяется f§,6) и сигнал неисправности электропривода sign формируется при выполнении условия (9) или(10). или(12). Сигнал sign индицируется выходным индикатором 9 и может быть использован для автоматического отключения электропривода.
Таким образом, предлагаемый способ обеспечивает контроль состояния электропривода при возникновении различного рода неисправностей в электрической и механической частях электродвигателя, при этом сигнал неисправности формируется с минимальным запаздыванием, исключающим развитие неисправности в процессе эксплуатации экскаватора.
Использование способа позволяет увеличить эксплуатационную производительность экскаватора за счет сокращения длительности ремонтов при своевременном выявлении возникающих неисправностей. Формула изобретения 1. Способ контроля параметров экскаваторногоэлектропривода по авт.св. № 1146369, отличающийся тем. что, с целью повышения надежности контроля электропривода, дополнительно измеряют уровень искрения коллектора электродвигателя,.определяют его среднее значение на интервале А t, задают номинальные значения уровней искрения коллектора электродвигателя при работе электропривода на внешней характеристике в зоне, характеризующейся изменением ве5 личины замедления вращения якоря двигателя не менее чем в 3-5 раз, и в зоне, характеризующейся, изменением скорости вращения якоря двигателя в пределах от нуля до 0,05 скорости холостого хода, срав10 нивают среднее значение измеренного на интервале At уровня искрения коллектора электродвигателя с заданными для указанных зон номинальными значениями уровней искрения и по результатам сравнения
15 судят о неисправности электродвигателя,
2.Способ по п. 1,отличающийся тем, что уровень искрения коллектора электродвигателя определяют путем выпрямления переменной составляющей якорного
20 тока электродвигателя в диапазоне частот от fi pn/60 ГЦ до кГц, последующей фильтрации указанной величины и ее интегрирования в течение одного оборота якоря, где р - число пар полюсов; п - число оборо25 тов электродвигателя.
3.Способ по п. 2. отличающийся тем, что диапазон частот выбирают в пределах 3Q-50 кГц.
4. Способ по пп. 1 и 2, о т л и ч 3 ю щ и й30 с я тем, что интервал определения среднего
значения выпрямленной и отфильтрованной
переменной составляющей якорного тока
электродвигателя равен 1--3 с.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля параметров экскаваторного электропривода | 1989 |
|
SU1740737A1 |
| Способ контроля параметров экскаваторного электропривода | 1986 |
|
SU1370198A1 |
| Электропривод постоянного тока | 1977 |
|
SU692044A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Электропривод постоянного тока | 1989 |
|
SU1815752A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2076448C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОТОКОМ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА В СИСТЕМЕ ДВУХЗОННОГО РЕГУЛИРОВАНИЯ СКОРОСТИ | 2011 |
|
RU2457611C1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| СПОСОБ МОНИТОРИНГА ПРОЦЕССА ИЗМЕЛЬЧЕНИЯ В БАРАБАННЫХ МЕЛЬНИЦАХ | 2023 |
|
RU2806426C1 |
| Способ управления электроприводом поворота экскаватора и устройство для его осуществления | 1986 |
|
SU1416626A1 |
Изобретение касается измерения эксплуатационных характеристик горных машин и предназначено для оперативного определения неисправности двигателя экскаваторного электропривода (ЭП) в процессе его эксплуатации. Цель изобретения - повышение надежности контроля ЭП. Для этого дополнительно измеряют уровень искрения электродвигателя (ЭД) и определяют его среднее значение на интервале времени ΔТ. При этом выпрямляют переменную составляющую якорного тока ЭД в диапазоне частот от F 1=PN/60Гц до F 2=50 кГц, где P - число пар полюсов
N - число оборотов ЭД. Указанную величину фильтруют и интегрируют в течение одного оборота якоря. Диапазон частот выбирают в пределах 30-50 кГц, а интервал ΔТ выбирают равным 1-3 с. Затем задают номинальные значения уровней искрения коллектора ЭД при работе ЭП по внешней характеристике в зоне, характеризующейся изменением величины замедления вращения якоря ЭД не менее чем в 3-5 раз, и в зоне, характеризующейся изменением скорости вращения якоря двигателя в пределах 0 - 0,05 скорости холостого хода. Среднее измеренное на заданном интервале времени ΔТ значение скорости сравнивают с заданным для указанных зон номинальными значениями уровней искрения и по результатам сравнения судят о неисправности ЭД. 3 з.п.ф-лы, 2 ил.
В 5
X
Я,
V(
в
I в
1щп б
Фиг. 2
| Авторское свидетельство СССР N 1146369.кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
