1
Изобретение относится к контролю параметров работы экскаваторов, в частности многодвигательного экскаваторного электропривода, характери- зующбгося наличием экскаваторной электромеханической характеристики.
Целью изобретения является увеличение точности контроля параметров экскаваторного электропривода.
Поставленная цель достигается тем что способ, включающий измерение тока якорной цепи и скорости вращения вала двигателя экскаваторного электропривода, дополняют измерением тока цепи возбуждения каждого двигателя и определяют на интервалах /it его средние значения, определяют на этих же интервалах средние значения тока якорной цепи и углы поворотов вала двигателя, по которым определяют средние значения моментов и производимой двигателем работы, определяют на п интервалах t средние значения производимой работы каждым из m дви- гателей, определяют фактический уровень загрузки каждого двигателя по отношению его среднего значения за п интервалов /)t средних значений производимой работы на каждом интер- вале к ее максимальному значению, определяемому при токе отсечки на том же интервале /it, устанавливают заданньй уровень загрузки двигателя электропривода,сравнивают фактичес- кий уровень загрузки двигателя с установленным уровнем и формируют выходной сигнал при снижении фактического уровня загрузки двигателя ниже заданного уровня. Кроме того, оп- ределяют среднее арифметическое значение производимой работы одним двигателем многодвигательного электропривода на интервале /It за п интервалов, определяют фактический уровен загрузки многодвигательного электропривода по отношению среднего арифметического значения производимой работы одним двигателем многодвигательного электропривода к максимальному ее значению для одного двигателя, определяемому при токе отсечки на том же интервале 4t, устанавливают заданный уровень загрузки многодвигательного электропривода, сравнива- ют фактический уровень загрузки многодвигательного электропривода с заданным уровнем и формируют выходной сигнал при снижении фактического
982
уровня загрузки многодвигательного электропривода ниже заданного, формируют сигналы недогрузки или перегрузки j-ro двигателя соответственно при условиях, если среднее значение за п интервалов 4t средних значений, производимой этим двигателем работы на интервале At, не превышает 85-95% или не менее 105-115% величины среднего арифметического значения, производимой работы одним двигателем многодвигательного привода на интервале at за п интервалов.
В случае однодвигательного электропривода на графике (фиг.1) внешней характеристики привода М f,(a)) можно построить совмещенный график изменения производимой двигателем работы А fJ (М, tAj,jt), где М изменяется на интервале от нуля до значения стопорного момента М(.,и; изменяется от нуля до скорости холостого хода двигателя и. , j . График изменения А имеет максимум в точке излома экскаваторной характеристики (точка токовой отсечки) . Следовательно, только в зоне, непосредственно прилегающей к , (изменение момент от М до М) двигатель в единицу времени 4t производит работу величиной не менее установленного уровня С л. Нелинейный характер функции А, большая крутизна правой ветви графика функции (при Н М), наличие сложног аргумента функции, включающего несколько нелинейно взаимосвязанных переменных, не. позволяют объективно оценить загрузку двигателя по любой из переменных ( и) или М : I „) . Однако
-.
отношение А ;/А . объективно характеризует степень использования двигателя: из графика (фиг.1) видно, что максимальная работа. А „ т(, Мт-о микс соответствует максимальной работе, производимой механизмом экскаватора, поэтому, если установить обоснованный уровень загрузки двигателя для конкретных условий его применения, то в случае снижения текущего значения отношения Ji/A ниже установленного значения С-, легко формировать сигнал, характеризующий недоиспользование контролируемого двигателя .
В случае многодвигательного электропривода необходимо определить среднее арифметическое значение производимой работы одним двигателем, т.е.
величину - Z А;, а степень использования двигателя характеризовать отно1шением - , где п - число
интервалов at.
В многодвигательном электроприводе появляется возможность определить загрузку каждого двигателя путем сравнения количества фактически выполненной им работы на принятом интервале с среднеарифметическим значением количества выполненной работы одним двигателем многодвигательного привода на том же интервале.
В этом случае величина недопустимого отклонения фактически выполненной двигателем работы от среднего арифметического значения количества выполненной работы одним двигателем многодвигательного привода может приниматься в пределах ±(5-15)%, что соответствует значениям отклонений основных параметров экскаваторного электропривода, при которых в производственных условиях производят переналадку электропривода.
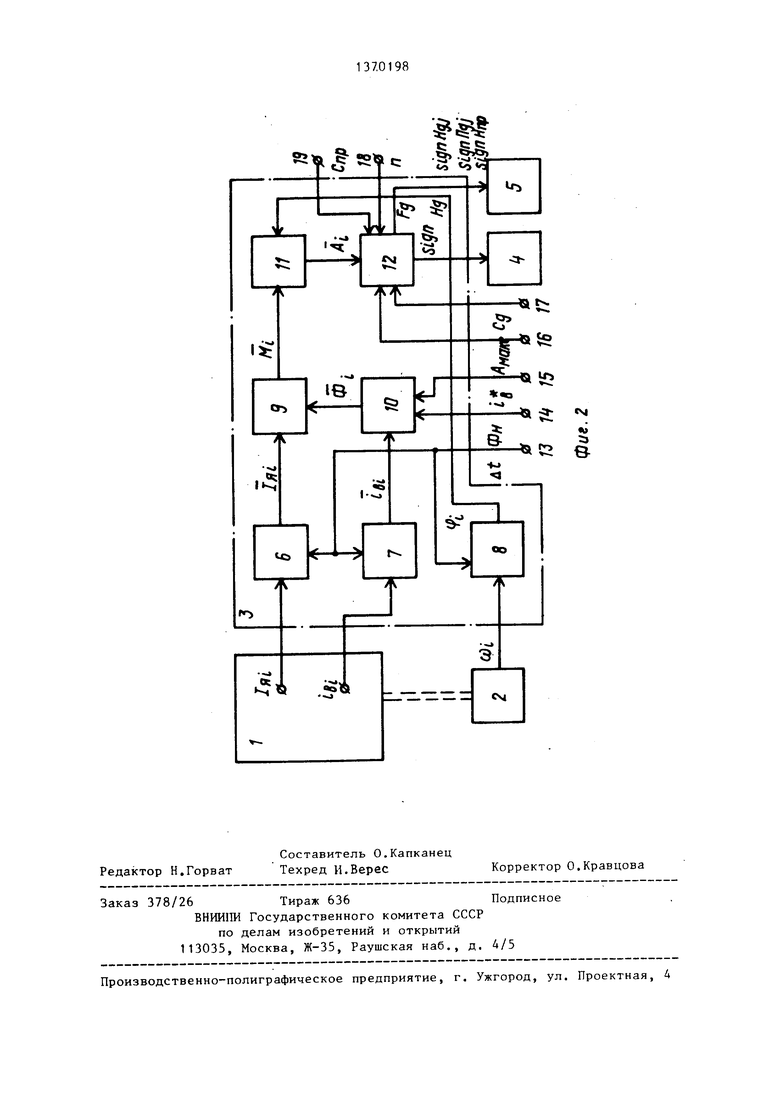
На фиг.1 приведена внешняя характеристика экскаваторного электропривода и график изменения производимой двигателем работы; на фиг.2 - структурная схема устройства, реализующего способ контроля параметров экскаваторного электропривода.
Способ включает следующие основные операции в случае однодвигатель- ного электропривода или для одного двигателя многодвигательного электропривода.
Измеряют ток якорной цепи I у- каждого двигателя экскаваторного электропривода.
Измеряют скорость вращения вала U) - каждого двигателя экскаваторного электропривода.
Измеряют ток цепи возбуждения 1„
о
каждого двигателя экскаваторного электропривода.
Определяют средние значения токов якорной цепи, цепи возбуждения и углы поворотов валов каждого двигателя на интервалах it ti - t, dt
П
я:
.
t, - t,
1 f
i.; dt
j,
,
l. u;;(t, - t, ).
(3)
Определяют средние значения моментов на валах двигателей на интервалах 4t
Mi с,Ь,- - f,.,
где Ф, Ф„(1 - );
(А) (5)
С -электромашинная постоянная; - интервал интегрирования
(4t 0,1-1 ,0 с); ф - магнитный поток насыщения
двигателя;
i - постоянная характеристики намагничивания двигателя. Определяют средние значения работы, производимой каждым двигателем на интервалах &t
А,. КМ.If, ,
(6)
25
Определяют на п интервалах At средние значения производимой работы каждым двигателем
А„,
Ч д - 2- А.
(7)
Определяют фактический уровень загрузки каждого двигателя
Api
А.
(R)
35
40
то
45
50
55
где A - максимальная работы двигателя экскаваторного электропривода при нагрузочном моменте М . М на интервале Jt, М - момент, развиваемый на валу двигателя в точке токовой отсечки (точке излома экскаваторной характеристики на графике фиг.1),
Устанавливают заданный уровень загрузки двигателя экскаваторного электропривода в пределах о 0,6-0,95.
Формируют выходной сигнал недогрузки двигателя S. Н 1 при условии F Со.
В случае многодвигательного электропривода.
I Определяют среднее арифметическое
значение производимой работы j-м двигателем многодвигательного электрона интервале At за п интер
fv, п
ЦА,
;(9)
mn
где m - число двигателей многодвигательного электропривода.
Устанавливают заданный уровень загрузки многодвигательного электропривода в пределах С 0,7-0,95.
Определяют фактический уровень загрузки мнргодвигательного электропривода
пр
AjliJ.
Л1СХКС
(10)
Формируют ВЫХОДНОЙ сигнал недогрузки многодвигательного электропривода S , Н „р 1 при условии FHP С„р.
С учетом разброса параметров внешних характеристик многодвигательного электропривода формируют сигналы недогрузки j-ro двигателя многодвигательного привода .HQ 1, если в результате сравнения
А„, . (0,85-0.95)Anij, (И) или сигнал перегрузки j-ro двигателя многодвигательного привода S; П , если в результате сравнения
А. (1,05-1,15)А
Ч
(12)
Пример реализации способа показан на фиг.2.
Двигатель 1 экскаваторного электропривода и датчик 2 скорости вращения вала двигателя связаны с вычислительным блоком 3, выходы которого подключены к индикаторам 4 и 5.
Вычислительный блок 3 содержит узел 6 определения среднего значения тока якорной цепи двигателя 1(,| на i-M интервале времени 4t, узел 7 определения среднего значения тока цепи возбуждения двигателя i g, на i-M интервале времени /it, узел 8 определения величины угла поворота вала Ц, двигателя на i-м интервале Лt, узел 9 определения среднего значения момента М ; на валу двигателя на i-M интервале времени 4t, узел 10 определения среднего значения намагничивающего потока Ф двигателя на i-M интервале t, узел 11 опре
701986.
деления среднего значения работы А,, производимой двигателем на i-M интервале dt, узел 12 определения показателя использования двигателя экскаваторного электропривода. Выход узла 6 подключен к первому входу узла 9, выход узла 7 через узел 10 связан со вторым входом узла 9, выходы
1Q узлов 8 и 9 подключены к входам узла 11, выход которого связан с входом узла 12. Соответствующие входы узлов 6-8 подключены к источникам сигналов, пропорциональных 1,,-, i е;
15 По цепям 13-19 в вычислительный блок 3 поступает нормативно-справочная информация 4t, ф, 1, А , Cs,, , п.
Устройство работает следуюишм об20 разом.
В процессе работы двигателя экскаваторного электропривода текущие значения 1с,, i д , W; поступают соответственно на входы узлов 6-8 вы25 числительного блока 3. На выходе узла 6 на каждом интервале времени ЛС формируется сигнал, пропорциональный
19i (формула 1), который поступает на вход узла 9. Аналогично формиру30 ются на выходах узлов 7 и 8 сигналы, пропорциональные i g, и if- (формулы
2и 3), которые поступают соответственно на входы узлов 10 и 11. На выходе узла 10 формируется сигнал, пропорциональный ф|(формула 5), и поступает на второй вход узла 9, на выходе которого формируется сигнал, пропорциональный М (формула 4). Этот сигнал поступает на второй вход
„ узла 11, на выходе которого формируется сигнал, пропорциональный А. (формула 6). Узел 12, обрабатывая входную информацию, формирует показатель FJ (формула В), .Н4 1,
35
45 i j n np ifj На индикаторе 5 отображается текущее
значение величины показателя F, а на индикаторе 4 - 5; Н ) 1
пр Т i (j;n 5 J if )
в случае отклонения загрузки двигате50
ля или привода в целом от заданнь х значений.
Таким образом, машинист экскавато- рз, располагая информацией о загрузке двигателя или электропривода в целом, имеет возможность в процессе экскавации эффективно загружать главные приводы, что позволяет увеличить тксплуатационную производительность экскаватора.
Формула изобретения
1. Способ контроля параметров экскаваторного электропривода, включающий измерение тока якорной цепи, скорости вращения вала каждого двигателя, отличающийся тем, что, с целью увеличения точности контроля параметров экскаваторного электропривода, измеряют ток цепи возбуждения каждого двигателя и определяют на интервалах й его средние значения, определяют на этих же интервалах средние значения тока якорной цепи и углы поворотов вала двигателя, по которым определяют средние значения моментов и производимой двигателем работы, определяют средние значения производимой работы каждым двигателем, определяют фактический уровень загрузки каждого двигателя по отнощению среднего значения производимой каждым двигателем работы к максимальному расчетному значению работы, задают уровень загрузки электродвигателя, сравнивают фактический уровень загрузки каждого двигателя с заданным уровнем и по результатам сравнения судят о загрузке каждого двигателя.
2. Способ по п.1, о тли ч а ю- щ и и с я тем, что, с целью увеличения точности контррля параметров экскаваторного электропривода за счет учета разброса параметров внешних характеристик двигателей, опре0 деляют среднее арифметическое значение производимой работы одним двигателем многодвигательного электропривода, определяют фактический уровень загрузки многодвигательного
5 привода по отношению среднего арифметического значения производимой работы одним двигателем многодвигательного электропривода к максимальному расчетному значению работы для
0 одного двигателя, задают уровень
загрузки многодвигательного электропривода, сравнивают фактический уровень загрузки многодвигательного электропривода с заданным уровнем
5 и по результатам сравнения судят о загрузке многодвигательного электропривода, а по результатам сравнения среднего значения производимой каждым двигателем работы и среднего
0 арифметического значения работы многодвигательного электропривода судят о загрузке каждого двигателя.
S: S.
S: S.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля параметров экскаваторного электропривода | 1988 |
|
SU1587151A1 |
| Способ оперативного контроля использования экскаватора-драглайна | 1986 |
|
SU1328451A1 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| Способ контроля работы экскаватора-драглайна | 1983 |
|
SU1129398A1 |
| Способ оценки качества управления экскаватором-драглайном | 1985 |
|
SU1344868A1 |
| Способ контроля параметров экскаваторного электропривода | 1989 |
|
SU1740737A1 |
| Способ измерения количества работы выполненной экскаватором-драглайном | 1982 |
|
SU1097765A1 |
| Способ контроля процесса заполнения ковша-экскаватора-драглайна | 1985 |
|
SU1298311A1 |
| Многодвигательный электропривод | 1981 |
|
SU964943A1 |
| Способ определения оптимального технического состояния механизмов многодвигательного одноковшового экскаватора и стенд для его осуществления | 1990 |
|
SU1774008A1 |
Изобретение относится к контролю работы экскаваторов и позволяет с высокой точностью контролировать параметры экскаваторного электропривода с экскаваторной электромеханической х-кой. Для этого измеряют токи якорной цепи и цепи возбуждения igj и скорость вращения W; вала каждого двигателя (Д). Определяют средние значения I углов поворота валов каждого Д на ; в( интервалах /it Сл - t На этих же интервалах Jt определяют средние значения моментов на валах Д. Определяют средние значения работы А j и А , производимой каждым Д на интервалах 4t и на п интервалах Jt. Определяют фактический уровень загрузки каждого Д по отношению А „, к ее максимальному значению, определяемому при токе отсечки на интервале at, и сравнивают его с заданным. При снижении фактического уровня загрузки Д ниже заданного формируют выходной сигнал недогрузки Д. В многодвигательном электроприводе загрузку каждого Д определяют путем сравнения количества фактически выполненной им работы на интервале ut с среднеарифметическим значением количества работы, выполненной одним Д многодвигательного привода на интервале ut за п интервалов. 1 з.п. ф-лы, 2 ил. (Л СО со 00 сг н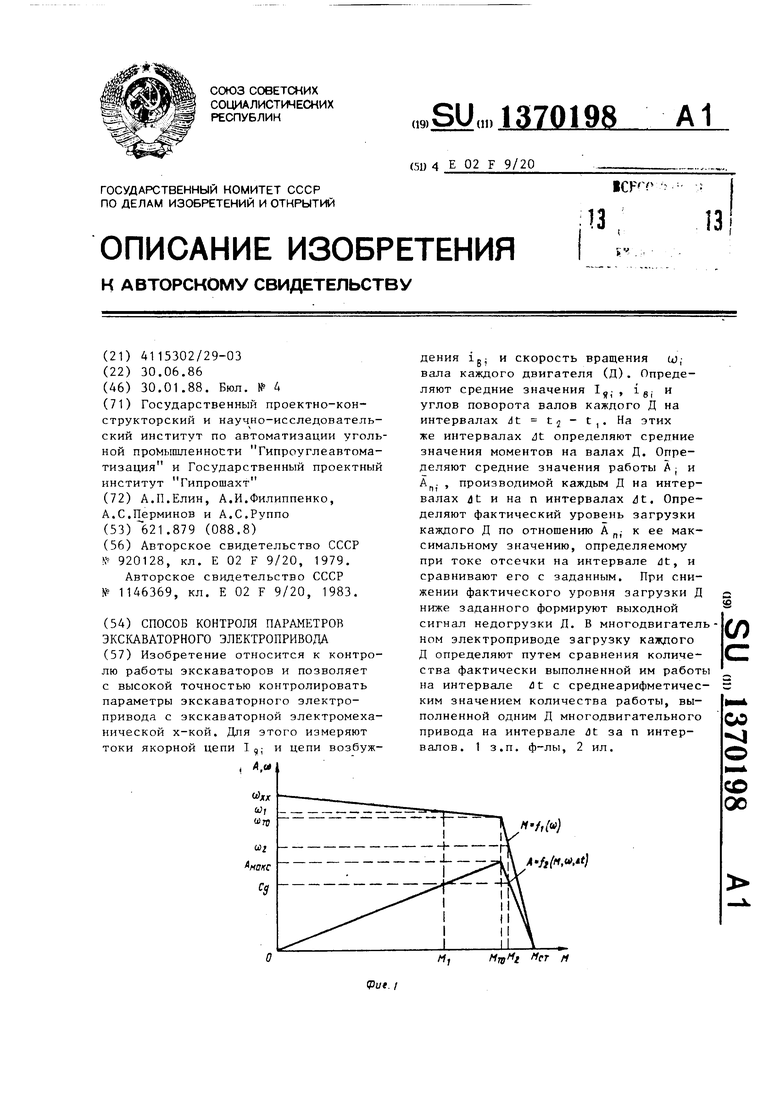
| Устройство для контроля работы экскаватора | 1979 |
|
SU920128A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР № 1146369, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
