Изобретение относится к железнодорожному транспорту и может быть использовано для защиты колесных пар электроподвижного состава от юза.
Цель изобретения - повышение надежности работы.
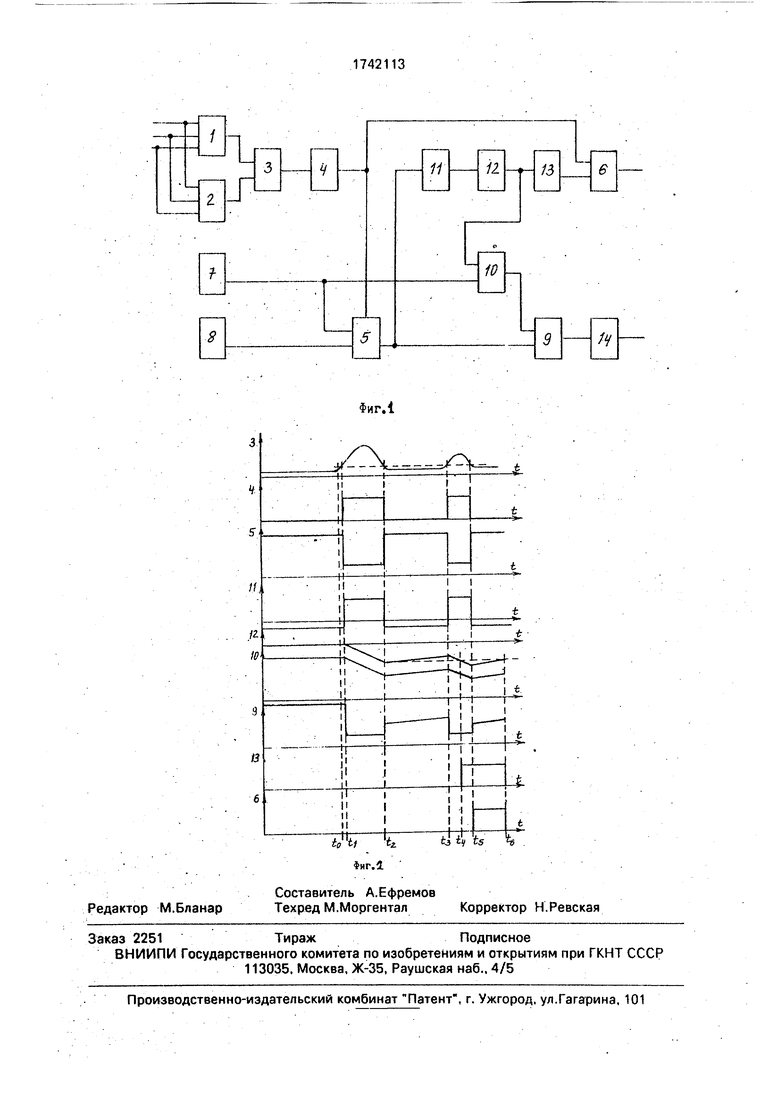
На фиг. 1 представлена блок-схема уст- ройства; на фиг. 2 - временные диаграммы, объясняющие работу устройства.
Устройство содержит блоки 1 и 2 выделения максимальной и минимальной частот вращения, выходы которых соединены с входами блока 3 определения разности сигналов, выход которого через первый порого- вый элемент 4 подсоединен к управляющему входу ключа 5 и одному из входов логического элемента И 6, выход которого связан с цепями управления песочниц. На входы ключа 5 поступают сиг-налы с выходов блока 7 задания максимальной тормозной силы и блока 8 задания минимальной тормозной силы. Выход ключа 5 подключен к одному из выходов блока 9 выделения минимального сигнала, на второй вход которого поступает сигнал с выхода сумматора 10. Кроме того, выход ключа 5 подключен к входу компаратора 11. Выход компаратора 11 подключен на вход интегратора 12, выход которого, в свою очередь, подключен на один из входов сумматора 10. а также через второй пороговый элемент 13 на другой вход логического блока И 6. На второй вход сумматора 10 поступает сигнал с выхода блока 7 задания максимальной
ч
N Ю
ы
тормозной силы. Выход блока 9 выделения минимального сигнала поступает на вход блока 14 регулирования тормозной силы.
Устройство работает следующим образом.
В тормозном режиме при отсутствии юза величины сигналов, соответствующие частотам вращения колесных пар поступают на блоки 1,2. Так как эти сигналы незначительно отличаются друг от друга, то сигнал на выходе блока 3 определения разности не превышает значения первого порогового элемента 4 и на его выходе устанавливается нулевой сигнал, поступающий на вход логического блока 6 и управляющий вход ключа 5. При поступлении нулевого сигнала на управляющий вход, ключ 5 обеспечивает подачу с блока 7 задания максимальной тормозной силы сигнала на вход блока 9 выделения минимального сигнала, на второй вход которого поступает сигнал с сумматора 10, равный величине сигнала блока 7 задания максимальной тор- мозной силы, так как сигнал, поступающий на его вход с интегратора 12, при длительном отсутствии юза равен нулю. Таким образов, с блока 9 выделения минимального сигнала нз вход блока 14 регулирования поступает сигнал, равный сигналу на выходе блока 7 задания максимальной тормозной силы, заданной машинистом.
При поступлении на управляющий вход ключа 5 нулевого сигнала с порогового элемента 4, ключ 5 обеспечивает прохождение сигнала с блока 7 задания максимальной тормозной силы на вход компаратора 11,
При отсутствии юза на вход интегратора 12 с выхода компаратора 11 поступает сигнал отрицательной полярности.
Сигнал на выходе интегратора 12 может быть только отрицательным или равным нулю. Поэтому при длительном отсутствии юза на выходе интегратора 12 сигнал равен нулю. Данный сигнал поступает на вход сумматора 10 и на вход второго порогового элемента 13, выходной сигнал которого при данном входном сигнале будет равен нулю. Нулевой сигнал с выхода порогового элемента 13 поступает на вход блока 6.
В случае возникновения юза на выходе, блока 3 определения разности сигнал превысит пороговое значение порогового элемента 4 и на его выходе появится сигнал, отличный от нуля. При этом ключ 5 переключается в положение, обеспечивающее подачу на вход блока 9 сигнала с блока 8 задания минимальной тормозной силы. Кроме того, сигнал с блока 8 задания минимальной тормозной силы через ключ поступает на вход компаратора 11, с выхода
которого на вход интегратора 12 подан сигнал положительной полярности. Сигнал с выхода интегратора 12 поступает на один из входов сумматора 10, на второй вход которого поступает сигнал с блока 7 задания максимальной тормозной силы. В данном случае, сигнал на выходе сумматора 10 равен величине сигнала с блока 7 задания максимальной тормозной силы за вычетом
0 величины сигнала на выходе интегратора 12. Очевидно, что в течение того времени, когда сигнал на выходе порогового элемента 4 будет отличен от нуля, сигнал на выходе сумматора 10 будет уменьшаться за счет
5 роста сигнала на выходе интегратора 12. Таким образом, на вход блока 9 поступают сигнал с блока 8 задания минимальной тормозной силы и сигнал с сумматора 10. На вход блока 14 в качестве задания поступит
0 сигнал с выхода блока 8 задания минимальной тормозной силы.
При прекращении юза на выходе порогового элемента 4 устанавливается нулевой сигнал, который переводит ключ 5 в состоя5 ние, обеспечивающее поступление через него на один из входов блока 9 сигнала с выхода блока 7 задания максимальной тормозной силы. На второй вход блока 9 выделения минимального сигнала поступает
0 сигнал с выхода сумматора 10, равный величине сигнала на выходе блока 7 задания максимальной тормозной силы за вычетом величины на выходе интегратора 12. При появлении на выходе порогового элемента
5 4 нулевого сигнала на вход компаратора 11 поступит сигнал, равный сигналу на выходе блока 7 задания максимальной тормозной силы. В результате этого на выходе компаратора 11 установится сигнал отрицатель0 ной полярности, что вызовет уменьшение величины сигнала на выходе интегратора 12. В случае отсутствия повторного юза величина на выходе интегратора 12 уменьшается до нуля. Таким образом, при
5 прекращении юза, задание тормозной силы, поступающее с блока 9 выделения мини- мального сигнала на вход блока 14 регулирования, установится с величины, равной величине сигнала на выходе блока 8
0 задания минимальной тормозной силы, до величины, равной сигналу на выходе блока 7 задания максимальной тормозной силы за вычетом величины сигнала на выходе интегратора 12.
5
Таким образом, при прекращении задание тормозного усилия, поступающее на вход блока 14 регулирования, лишь через определенное время достигнет значения, соответствующего сигналу на выходе блока
7 задания максимального тормозного усилия.
При повторном юзе сигнал на выходе интегратора 12 за время между двумя снижениями до минимальной величины тор- мозного усилия не успеет уменьшиться до нуля и поэтому при новом юзе будет увеличиваться не от нуля, а от определенной величины. При этом может наступить момент, когда она превысит пороговое значение по- рогового элемента 13 и на вход логического блока И 6 поступит сигнал, отличный от нуля. Однако при юзе сигнал на включение песочниц с логического блока 6 И не поступит, так как на второй его вход посту- пает с порогового элемента 4 сигнал, отличный от нуля. В свою очередь, с блока 9 выделения минимального сигнала на блок 14 регулирования будет поступать сигнал, равный сигналу на выходе блока 8 задания минимальной тормозной силы.
При прекращении юза на выходе порогового элемента 4 устанавливается ноль -и тем самым разрешается подсыпка песка, если сигнал на выходе порогового элемента
13отличен от нуля. Кроме того, на один из входов блока 9 выделения минимального сигнала поступает через ключ 5 сигнал, равный сигналу блока 7 задания максимальной тормозной силы, а на другой - равный сиг- налу блока 7 за вычетом сигнала на выходе интегратора 12, который поступает в блок
14регулирования. Этот сигнал увеличивается до величины сигнала блока 7 задания максимальной тормозной силы с темпом, равным темпу уменьшения величины сигнала на выходе интегратора 12.
На фиг. 2 представлена временная диаграмма, объясняющая работу устройства при наезде на участок большой протяжен- ности с низким значением коэффициента сцепления. На фиг. 2 приняты следующие обозначения: по оси ординат - величины сигналов на выходе указанных блоков; по оси абсцисс - текущее время; to - момент
наезда на участок с низким значением коэффициента сцепления; ta-ts - временные интервалы, на протяжении которых сигнал на выходе блока 3 выделения разности сигналов превышал пороговое значение порогового элемента A; t4-te - временной интервал, на протяжении которого величина сигнала на выходе интегратора 12 превышает пороговое значение порогового элемента 13.
Формула изобретения Устройство для защиты от юза колесных пар электроподвижного состава, содержащее блоки выделения максимальной и минимальной частот вращения, выходы которых соединены с входами блока определения разности, выход которого подключен к входу первого порогового элемента, выход которого соединен с управляющим входом ключа, интегратор, выход которого соединен с входом второго порогового элемента и одним из входов сумматора, песочницы, отличающееся тем, что, с целью повышения надежности в работе, оно снабжено блоками задания максимальной и минимальной тормозной силы, компаратором, логическим элементом И, блоком выделения минимального сигнала и блоком регулирования тормозной силы, при этом выход блока задания максимальной тормозной силы соединен с другим входом сумматора и первым входом ключа, второй вход которого подключен к выходу блока задания минимальной тормозной силы, а выход соединен с входом компаратора, выход которого соединен с входом интегратора, один из входов логического элемента И соединен с выходом первого порогового элемента, другой вход - с выходом второго порогового элемента, а выход - с цепями управления песочниц, первый вход блока выделения минимального сигнала соединен с выходом сумматора, второй вход - с выходом ключа, а выход - с входом блока регулирования тормозной силы.
Or
J
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты от буксования и юза колесных пар электровоза | 1987 |
|
SU1438976A1 |
| Устройство для защиты от юза колесных пар электроподвижного состава | 1986 |
|
SU1384433A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1990 |
|
RU2034721C1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| Устройство для автоматического регулирования колесного тормоза по условиям движения | 1987 |
|
SU1505811A1 |
| Противоюзная система железнодорожного вагона | 1985 |
|
SU1306771A1 |
| Устройство для управления многодвигательным электроприводом транспортного средства | 1984 |
|
SU1411175A1 |
| Противоюзная система поезда | 1985 |
|
SU1350067A1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРАМЕТРАМИ ИЗЛУЧЕНИЯ ЛАЗЕРА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2091942C1 |
Изобретение относится к устройствам для защиты колесных пар от юза. Цель - повышение надежности в работе, Устройство содержит блоки выделения максимальной и минимальной частот вращения, первый и второй пороговые элементы, за- датчики максимальной и минимальной тормозной силы, компаратор, сумматор, интегратор и ключ, обеспечивающие корректировку задаваемой величины тормозной силы от величины коэффициента сцепления пары колесо-рельс и выбор режима подсыпки пе ска. 2 ил.
| Устройство для защиты от юза колесных пар электроподвижного состава | 1986 |
|
SU1384433A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
