со ас
4
СО СО
Упрабление
работай
necovKLttt
138
от блока 6. При одновременном юзе колесных пар резко снижается сигнал на выходе блока 3, блок 6 моделирует эталонную скорость, на выходе блока
13сравнения появляется сигнал, который при превышении порога элемента
14поступает на интегратор 15 и-зак
рывает ключевой элемент 16. При юзе определенной длительности и интенсивности напряжение на интеграторе дос- , тигает порога срабатывания элемента 17, который подает сигнал на управле-. нйе песочницами для подсыпки песка под колесные пары. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| Устройство для защиты от юза колесных пар электроподвижного состава | 1989 |
|
SU1742113A1 |
| Устройство для защиты от юза колесных пар электроподвижного состава | 1982 |
|
SU1082644A1 |
| Устройство для защиты от буксования и юза колесных пар электровоза | 1987 |
|
SU1438976A1 |
| Способ регулирования сил тяги и торможения электроподвижного состава | 1987 |
|
SU1416346A1 |
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| Устройство защиты от боксования и юза | 1986 |
|
SU1411172A1 |
| Устройство для защиты от избыточного скольжения колесных пар транспортного средства | 1984 |
|
SU1316860A2 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2013 |
|
RU2540223C1 |
Изобретение относится к транспорту. Цель изобретения - повьшение надежности. Устройство содержит датчики 1 частот вращения колесных пар, которые подключены через преобразователи 2 к входам блоков 3 и 4 вьще- ления максимального и минимального сигналов. Блоки 3 и 4 и блок 5 эта- лонной скорости соединены с блоками 6 и 13 сравнения, дифференцирующим блоком 9, блоком 11 умножения и пороговыми элементами 7, 8 и 17. При юзе через сумматор 10 на блок 11 умножения поступает сигнал, пропорциональный разности частот вращения и производной этой разности, в соответ ствии с которым исполнительный блок 12 регулирует тормозную силу. Коэффи диенты пропорциональности этих сигна лов линейно зависят от скорости элек троподвижногр состава, поступающей - с SS (Л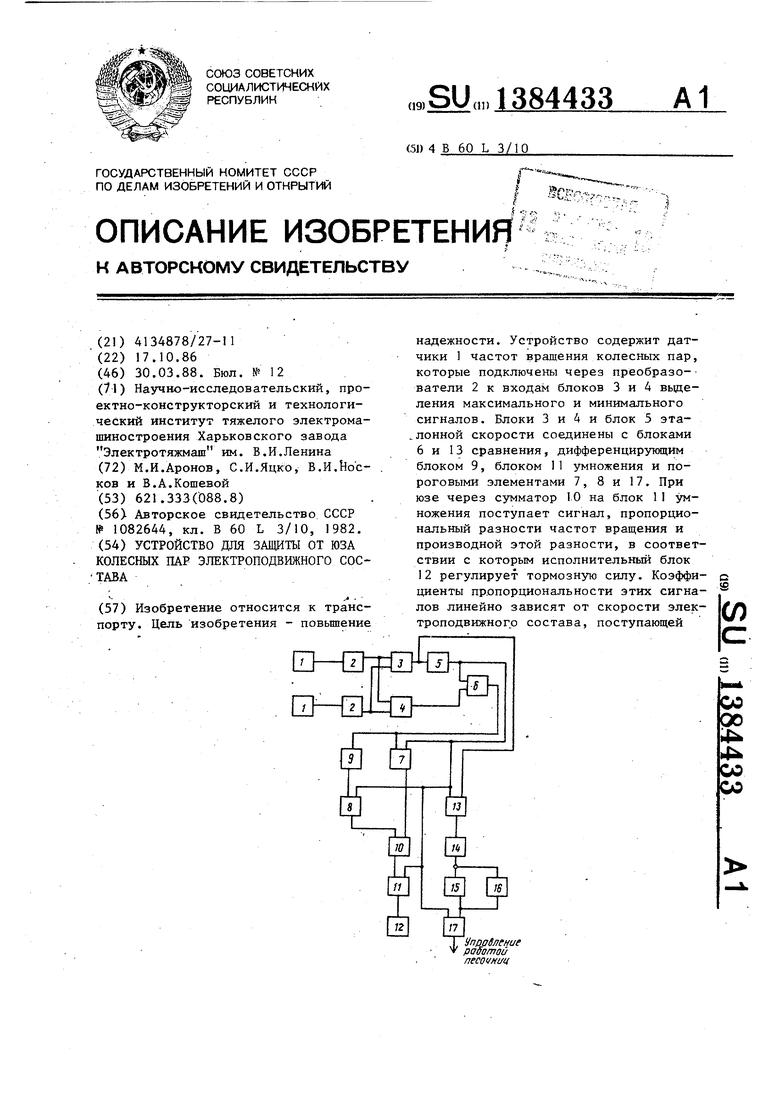
-1
Изобретение относится к транспорту, в частности к устройствам для защиты от юза колесных пар электроподвижного состава.
Цель изобретения - повьшение нат дежности.
На чертеже представлена блок-схема предлагаемого устройства.
Устройство содержит датчики 1 частот вращения колесных пар, подключенные через преобразователи 2 к входам блока 3 выделения, максимального сигнала и входам блока 4 выделения минимального сигнала. Выход блока 3 подключен к входу блока 5 эталонной скорости, выход которого соединен с одним из входов блока 6 сравнения, другой вход которого соединен с выходом блока 4. Выход блока 6 сравне- ния подключен к одному из входов первого порогового элемента 7 непосредственно, а к одному из входов второго порогового элемента 8 через дифференцирующий блок 9. Выходы пороговых элементов 7 и 8 подключены к входам сумматора 10, соединенного выходом с одним из входов блока 11 умножения выход которого подключен к входу исполнительного блока 12. Выход блока 3 выделения максимального сигнала соединен с одним из входов дополнительного блока 13 сравнения, выход которого подключен к входу третьего порогового элемента 14. С выходом порогового элемента 14 соединены входами интегратор 15 и ключевой элемент 16, выходы которых подключены к одному из входов дополнительного порогового элемента 17. Выход блока 5 эталонной скорости подключен к другим входам пороговых элементов 7, 8 и 17, блока 11 умножения и дополнительного блока 13 сравнения. Выход дополнительного
0
5
0
5
0
5
0
порогового элемента 17 предназначен для подключения к блоку управления песочницами (не показано).
Устройство работает следующим образом.
В тормозном режиме при отсутствии юза величина -сигналов датчиков 1 частот вращения колесных пар незначительно отличается друг от друга, невелика и скорость изменения этих сигналов, так как она определяется лишь эксплуатационными значениями ускорения. .
Блок 5 эталонной скорости, на вход которого поступает сигнал с выхода блока 3 вьщеления максимапь- . ного сигнала, организован таким образом. Что при уменьшении входного сигнала с темпом, не превьшающим определенно выбранного, выходной сигнал полностью повторяет входной, в противном случае выходной сигнал изменяется с заранее установленным темпом, задаваемым с учетом веса сое тава, максимальной величины тормоз-: ного усилия, уклона и т.д. В случае роста входного сигнала выходной сигнал или полностью повторяет входной, если он меньше или равен ему, или продолжает уменьшаться с заданным .темпом, если входной-сигнал меньше его по величине.
Блоком 5 эталонной скорости может быть задатчик интенсивности, представляющий собой усилитель, с ограничением выходного сигнала в случае превышения выходным сигналом блока 5 эталонной скорости его входного сигнала на величину, большую заданного значения, в случае превьшения входной величиной блока 5 эталонной скорости его выходной величины коэффи- идиент усиления усилителя максимально
допустимый; и последовательно с усилителем включенный интегратор, которые охвачены отрицательной обратной связью по выходной величине блока 5 эталонной скорости. Следовательно, на вход усилителя подается разность сигналов между входной и выходной ве личинам блока 5 эталонной скорости, а выход усилителя подключен к входу интегратора, выход которого является выходом блока 5 эталонной скорости.
При отсутствии юза сигналы, поступающие через блоки 2-5 на блок 6 сравнения сигналов, примерно равны и сигнал на его выходе равен нулю. С учетом дальнейшего прохождения сигнала через пороговые элементы 7 и 8 величина напряжения на одном из входов блока I1 умножения также равна нулю, поэтому на вход исполнительного блока 12 сигнал не поступает. Отсутствует сигнал и по цепи блока 13 срав- ;нения, порогового элемента 14, интегратора 15, ключевого элемента 16 и порогового элемента 17, управляющего работой устройства управления песочницами.
В случае возникновения юза при наличии хотя бы одной не юзущей оси снижается напряжение датчика 1 частоты вращения юзующих колесных пар, вследствие чего на выходе блока 6 сравнения появляется сигнал, пропорциональный максимальной разности частот вращения колесных пар.
В зависимости от развития процесса юза и скорости движения через сумматор 10 на другой вход блока 11 умножения поступает сигнал, пропорциональный разности частот вращения и производной этой разности, что обеспечивает оптимальные условия регулирования тормозной силы при непрерывном воздействии на исполнительный блок 12. Сигнал с порогового элемента 7 пропорционален разности .частот вращения колесных пар, а с порогового элемента 8-- их производной, причем коэффициенты пропорциональности этих сигналов линейно зависят от измене - ния скорости электроподвижного состава. Это достигается тем, что на один вход блока 11 умножения подается сигнал, пропорциональной скорости состава. Сигнал на выходе блока 11 умножения снижает напряжение на выходе исполнительного блока 12 и, следовательно, тормозную силу на ободе
0
5
0
5
0
5
0
5
0
5
колеса, что предотвращает развитие юза. Прн несинхронном юзе величина на выходе блока 13 сравнения не пре- вьппает пороговой величины порогового элемента 14, и на выходе интегратора 15 устанавливается нулевой сигн ал, в результате пороговый элемент 17 не выдает сигнал на включение песочниц. В случае же одновременного вхождения в юз всех колесных пар начинает резко снижаться сигнал на выходе блока 3 выделения максимального сигнала. Это приводит к моделированию скорости движения локомотива блоком 5 эталонной скорости и появлению на выходе блока 13 вьщеления разности сиг- нала, поступающего на вход порогового элемента 14, который при превышении его -пороговой величины поступает на вход интегратора 15 и ключевого элемента 16. В свою очередь ключевой элемент 16 организован таким образом, что при поступлении на его вход нулевого сигнала он замкнут, а в Других случаях - разомкнут. Т.е. при юзе определенной длительности и глубины напряжение на выходе интегратора 15 достигает величины срабатывания порогового элемента 17, который подает .сигнал на включение песочниц, в результате чего коэффициент сцепления колес с рельсами увеличивается и создаются условия быстрого его прекращения. При синхронном юзе канал управления исполнительного блока 12 работает аналогично, .как и при несинхрон- ном юзе .
После устранения юза подача песка прекращается, а тормозная сила восстанавливается до заданной величины.
Формула изобретения
Устройство для защиты от юза колесных пар электроподвижного состава, содержащее датчики частот вращения колесных пар, подключенные через пре- , образователи к входам блоков выделения максимального сигнала и минимального сигнала, последний из которых соединен выходом с одним we выходов блока сравнения, выход которого подключен непосредственно и через диф- ференцирукнций блок к одним из входов первого и второго пороговых элементов, соединенных выходами с входами сумматора, выход которого подключен к одному из входов блока умножения.
5 13844336 ,
соединенного выходом с входом испол-го блока сравнения подключен к входу нительного блока, и третий пороговыйтретьего порогового элемента, под- элемент, отличающеесяключенного выходом к входам интегра- тем, что, с целью повьшения надежное-тора и ключевого элемента, выходы ко- ти, оно снабжено блоком эталонной горых соединены с одним из входов скорости, интегратором, ключевым эле-четвертого порогового элемента, дру- ментом, четвертым пороговым элемен-гой вход которого подключен к выходу том и дополнительным блоком сравне-блока эталонной скорости, с которым
НИН, один из входов которого и вход 0
блока эталонной скорости подключены рого пороговых элементов, другой к выходу блока выделения максималь- вход блока умножения и другие входы ного сигнала, а выход дополнительно- блоков сравнения.
соединены другие входы первого и вто
| Устройство для защиты от юза колесных пар электроподвижного состава | 1982 |
|
SU1082644A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
