Изобретение относится к области робототехники и может быть использовано в промышленных роботах и манипуляторах.
Известно захватное устройство, включающее корпус и установленный в нем захватный элемент с приводом его перемещения, при этом захватный элемент выполнен в виде пластины из эластичного материала с глухим отверстием со стороны рабочей поверхности.
Недостатком известного устройства является невысокая надежность захвата массивных ферромагнитных деталей, а также ферромагнитных деталей сложной конфигурации.
Цель изобретения - повышение надежности захвата ферромагнитных деталей.
Поставленная цель достигается тем, что в захватном устройстве, содержащем корпус и установленный в нем захватный элемент с приводом его перемещения, при этом захватный элемент выполнен в виде пластины из эластичного материала с глухим отверстием со стороны рабочей поверхности, корпус выполнен из немагнитного материала, а материал пластины содержит ферромагнитный наполнитель, при этом привод перемещения пластины выполнен в виде электромагнитной обмотки, установленной на боковой поверхности корпуса коаксиально ему.
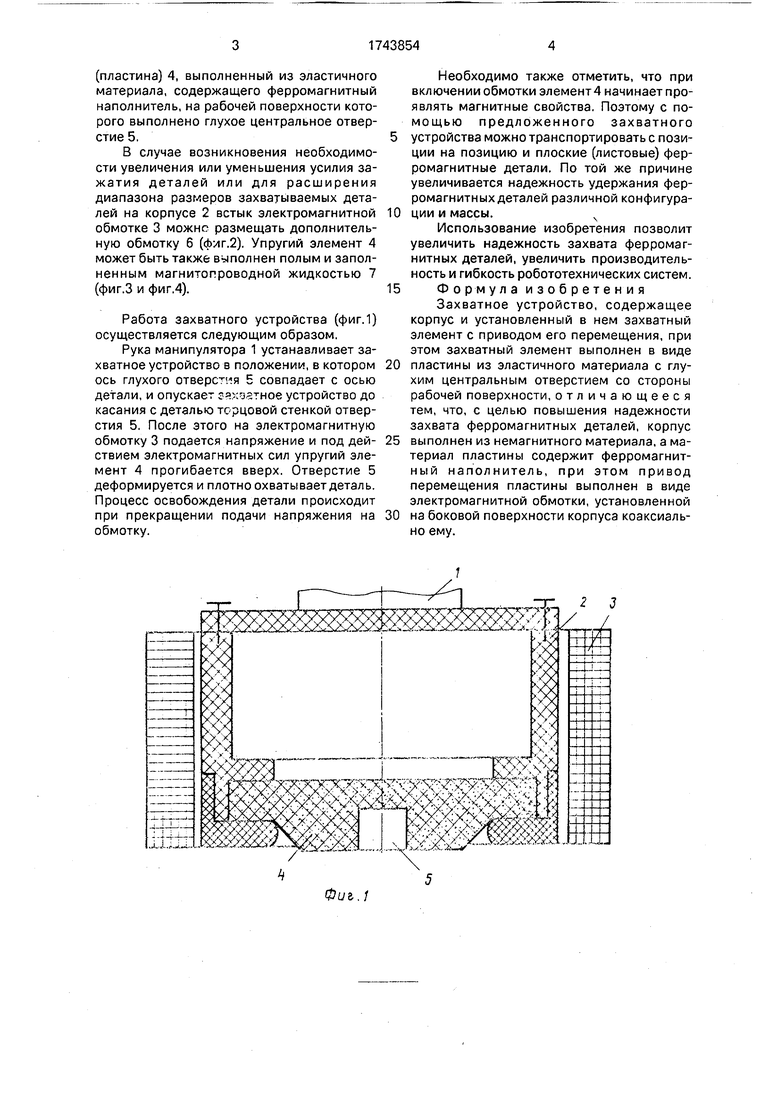
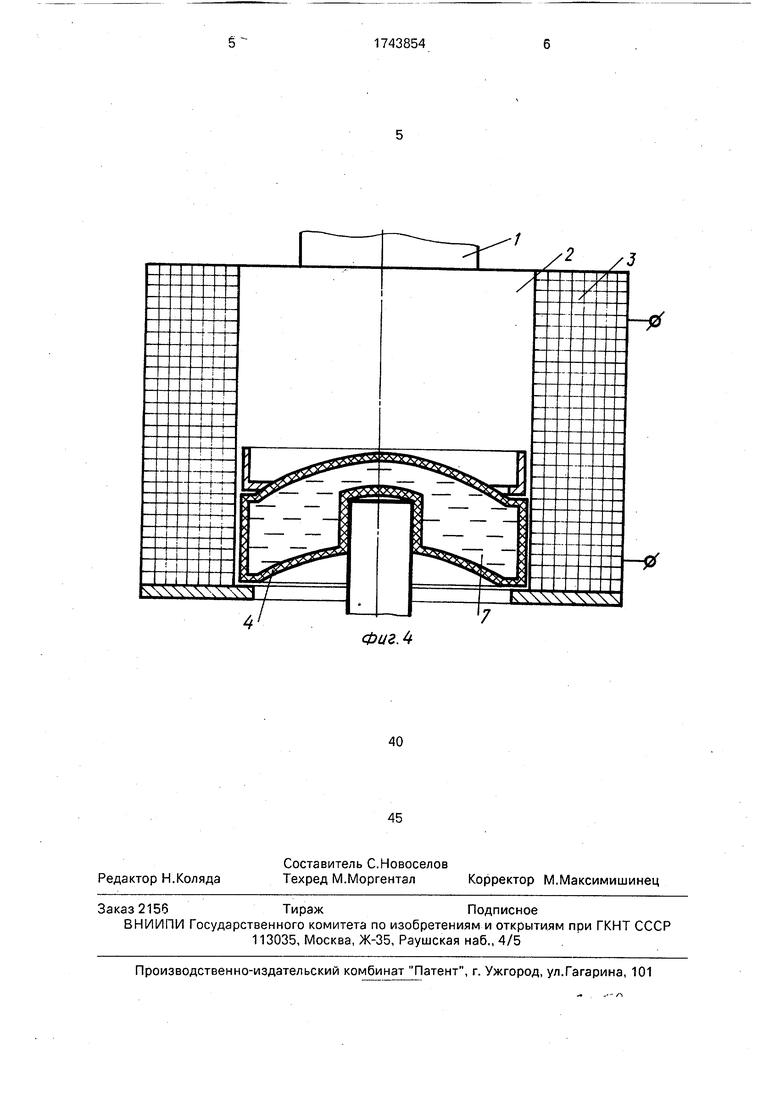
На фиг.1 изображен продольный разрез захватного устройства с упругим элементом из резины с ферромагнитными частицами; на фиг.2 - вариант исполнения захватного устройства с дополнительной обмоткой; на фиг.З и 4 - вариант исполнения захватного устройства с упругим элементом в виде полой камеры, заполненной магнитной жидкостью.
Захватное устройство (фиг.1) смонтировано на руке манипулятора 1, содержит корпус 2 цилиндрической формы, выполненный из немагнитного материала, электромагнитную обмотку 3, установленную по наружному диаметру корпуса 2 и упругий элемент
1
ь. со
00
ел
-N
(пластина) 4, выполненный из эластичного материала, содержащего ферромагнитный наполнитель, на рабочей поверхности которого выполнено глухое центральное отверстие 5.
В случае возникновения необходимости увеличения или уменьшения усилия зажатия деталей или для расширения диапазона размеров захватываемых деталей на корпусе 2 встык электромагнитной обмотке 3 можнг размещать дополнительную обмотку 6 (фиг.2). Упругий элемент 4 может быть также выполнен полым и заполненным магнитогроводной жидкостью 7 (фиг.З и фиг.4).
Работа захватного устройства (фиг.1) осуществляется следующим образом.
Рука манипулятора 1 устаназливает захватное устройство в положении, в котором ось глухого отверсг я Б совпадает с осью детали, и опускает ся атное устройство до касания с деталью терцовой стенкой отверстия 5. После этого на электромагнитную обмотку 3 подается напряжение и под дей- ствием электромагнитных сил упругий элемент 4 прогибается вверх. Отверстие 5 деформируется и плотно охватывает деталь. Процесс освобождения детали происходит при прекращении подачи напряжения на обмотку.
Необходимо также отметить, что при включении обмотки элемент4 начинает проявлять магнитные свойства. Поэтому с помощью предложенного захватного устройства можно транспортировать с позиции на позицию и плоские (листовые) ферромагнитные детали. По той же причине увеличивается надежность удержания ферромагнитных деталей различной конфигурации и массы.ч
Использование изобретения позволит увеличить надежность захвата ферромагнитных деталей, увеличить производительность и гибкость робототехнических систем.
Формула изобретения
Захватное устройство, содержащее корпус и установленный в нем захватный элемент с приводом его перемещения, при этом захватный элемент выполнен в виде пластины из эластичного материала с глухим центральным отверстием со стороны рабочей поверхности, отличающееся тем, что, с целью повышения надежности захвата ферромагнитных деталей, корпус выполнен из немагнитного материала, а материал пластины содержит ферромагнитный наполнитель, при этом привод перемещения пластины выполнен в виде электромагнитной обмотки, установленной на боковой поверхности корпуса коаксиаль- но ему.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для мягких деталей | 1990 |
|
SU1811482A3 |
| Электромагнитное захватное устройство | 1990 |
|
SU1745541A1 |
| Захватное устройство | 1990 |
|
SU1775290A1 |
| Захватное устройство для мягких деталей | 1991 |
|
SU1779583A1 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
| Захватное устройство | 1989 |
|
SU1743853A2 |
| Захватное устройство манипулятора | 1989 |
|
SU1669713A1 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |

Использование: робототехника, в захватных органах промышленных роботов и манипуляторов. Сущность изобретения: устройство содержит корпус 2 из немагнитного материала и установленный в нем захватный элемент с приводом его перемещения. Захватный элемент выполнен в виде пластины 4 из эластичного материала с ферромагнитным наполнителем. На пластине выполнено глухое отверстие 5 со стороны рабочей поверхности. Привод перемещения пластины выполнен в виде электромагнитной обмотки 3, расположенной на боковой поверхности корпуса коаксиально ему. После подачи питания на электромагнитную обмотку под действием электромагнитных сил пластина 4 прогибается вверх, отверстие 5 деформируется и его стенки плотно охватывают деталь. 4 ил.
.. - A.J
Фиг /
т
ю
00 С)
Ј
-Cvj
«о
3
в
Фиг А
| Захватное устройство конструкции Г.М.Хачатряна и С.А.Новоселова | 1988 |
|
SU1537530A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
