1
(21)4408545/31-08
(22)11.04.88
(46) 23.01.90. Бюл. № 3
,(75) Г. М. Хачатрян и С. А. Новоселов
(53)62-229-72(088.8)
(56)Авторское свидетельство СССР № 571369, кл. В 25 J 15/12, 1975.
(54)ЗАХВАТНОЕ УСТРОЙСТВО КОНСТРУКЦИИ Г. М. ХАЧАТРЯНА И С. А. НОВОСЕЛОВА
(57)Изобретение относится к робототехнике и может быть использовано в захватных устройствах промышленных роботов и манипуляторов. Цель изобретения - упрощение конструкции, повышение надежности в работе путем исключения вибрации. Захватное устройство, смонтированное
на руке 1 манипулятора, содержит корпус 2, приводной механизм 3 с подвижным элементом 4 и упругий элемент 5, выполненный в виде пластины из эластичного материала, например из резины, с глухим отверстием 6, выполненным со стороны поверхности соприкосновения с деталью. Подвижный элемент 4, перемещаясь в сторону детали, изгибает элемент 5. При этом боковая поверхность глухого отверстия 6 растягивается и его диаметр увеличивается Диаметр деформированного отверстия 6 позволяет разместить в нем деталь. После этого элемент 4 приводного механизма 3 возвращается в исходное положение и боковые стенки отверстия 6 плотно охватывают деталь. Процесс освобождения детали происходит в обратном порядке. 1 ил.
SS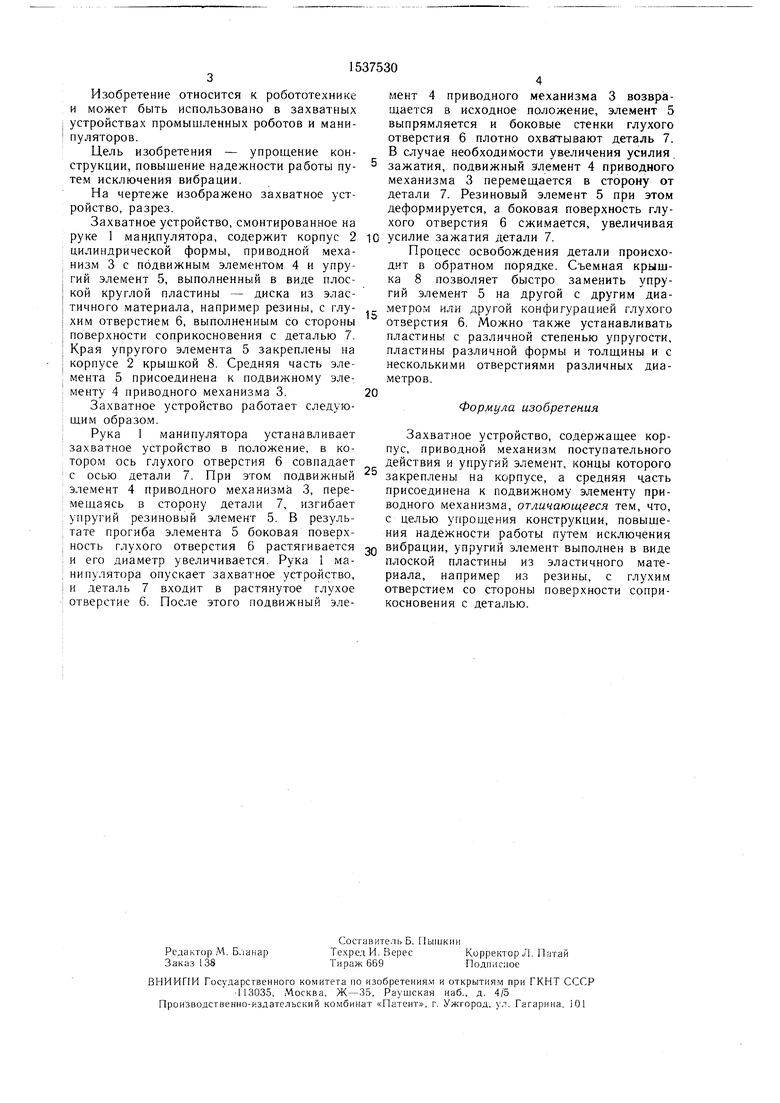
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1989 |
|
SU1743853A2 |
| Захватное устройство | 1990 |
|
SU1768383A2 |
| Захватное устройство | 1989 |
|
SU1743854A1 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
| Захватное устройство | 1989 |
|
SU1710339A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| Захватное устройство | 1985 |
|
SU1341023A1 |
| Захватное устройство | 1986 |
|
SU1364474A1 |
| Захватное устройство для мягких деталей | 1990 |
|
SU1811482A3 |
| ЗАХВАТ | 1992 |
|
RU2043916C1 |
Изобретение относится к робототехнике и может быть использовано в захватных устройствах промышленных роботов и манипуляторов. Цель изобретения - упрощение конструкции, повышение надежности в работе путем исключения вибрации. Захватное устройство, смонтированное на руке 1 манипулятора, содержит корпус 2, приводной механизм 3 с подвижным элементом 4 и упругий элемент 5, выполненный в виде пластины из эластичного материала, например из резины, с глухим отверстием 6, выполненным со стороны поверхности соприкосновения с деталью. Подвижный элемент 4, перемещаясь в сторону детали, изгибает элемент 5. При этом боковая поверхность глухого отверстия 6 растягивается и его диаметр увеличивается. Диаметр деформированного отверстия 6 позволяет разместить в нем деталь. После этого элемент 4 приводного механизма 3 возвращается в исходное положение и боковые стенки отверстия 6 плотно охватывают деталь. Процесс освобождения детали происходит в обратном порядке. 1 ил.
с/
СД
со i
СЛ
со
Изобретение относится к робототехнике и может быть использовано в захватных устройствах промышленных роботов и манипуляторов.
Цель изобретения - упрощение конмент 4 приводного механизма 3 возвращается в исходное положение, элемент 5 выпрямляется и боковые стенки глухого отверстия 6 плотно охватывают деталь 7. В случае необходимости увеличения усилия.
струкции, повышение надежности работы пу- зажатия, подвижный элемент 4 приводного тем исключения вибрации.механизма 3 перемещается в сторону от
На чертеже изображено захватное уст- детали 7. Резиновый элемент 5 при этом ройство, разрез.деформируется, а боковая поверхность глуЗахватное устройство, смонтированное на хого отверстия 6 сжимается, увеличивая руке 1 манипулятора, содержит корпус 2 10 усилие зажатия детали 7. цилиндрической формы, приводной меха-Процесс освобождения детали происхонизм 3 с подвижным элементом 4 и упру- дит в обратном порядке. Съемная крыш- гий элемент 5, выполненный в виде плос- ка 8 позволяет быстро заменить упру- кой круглой пластины - диска из элас- гий элемент 5 на другой с другим диа- тичного материала, например резины, с глу- . метром или другой конфигурацией глухого хим отверстием 6, выполненным со стороны отверстия 6. Можно также устанавливать
пластины с различной степенью упругости, пластины различной формы и толщины и с
поверхности соприкосновения с деталью 7. Края упругого элемента 5 закреплены на корпусе 2 крышкой 8. Средняя часть элемента 5 присоединена к подвижному элементу 4 приводного механизма 3.
Захватное устройство работает следующим образом.
Рука 1 манипулятора устанавливает захватное устройство в положение, в котором ось глухого отверстия 6 совпадает с осью детали 7. При этом подвижный элемент 4 приводного механизма 3, перемещаясь в сторону детали 7, изгибает упругий резиновый элемент 5. В результате прогиба элемента 5 боковая поверх20
несколькими отверстиями различных диаметров.
Формула изобретения
Захватное устройство, содержащее корпус, приводной механизм поступательного действия и упругий элемент, концы которого закреплены на корпусе, а средняя часть присоединена к подвижному элементу приводного механизма, отличающееся тем, что, с целью упрощения конструкции, повышения надежности работы путем исключения ность глухого отверстия 6 растягивается grj вибрации, упругий элемент выполнен в виде и его диаметр увеличивается. Рука 1 ма- плоской пластины из эластичного мате- нип лятора опускает захватное устройство, риала, например из резины, с глухим и деталь 7 входит в растянутое глухое отверстием со стороны поверхности сопри- отверстие 6. После этого подвижный эле- косновения с деталью.
20
несколькими отверстиями различных диаметров.
Формула изобретения
Захватное устройство, содержащее корпус, приводной механизм поступательного действия и упругий элемент, концы которого закреплены на корпусе, а средняя часть присоединена к подвижному элементу приводного механизма, отличающееся тем, что, с целью упрощения конструкции, повыше
