Изобретение относится к области робототехники и может быть использовано в захватных устройствах промышленных роботов и манипуляторов.
Известно захватное устройство, содержащее корпус, приводной механизм поступательного действия и упругий элемент, концы которого закреплены на корпусе, средняя часть присоединена к подвижному элементу приводного механизма, а сам упругий элемент выполнен в виде плоской пластины из эластичного материала, например из резины,с глухим отверстием со стороны поверхности соприкосновения с деталью.
Недостатком известного захватного устройства являются ограниченные технологические возможности вследствие неосуществимости захвата деталей за внутреннюю поверхность.
Цель изобретения - расширение технологических возможностей за счет обеспечения захвата деталей за внутреннюю поверхность.
Поставленная цель достигается тем, что в захватном устройстве, содержащем корпус, приводной механизм поступательного действия и упругий элемент, концы которого закреплены на корпусе, а средняя часть присоединена к подвижному элементу приводного механизма, а сам упругий элемент выполнен в виде плоской пластины из эластичного материала, например, из резины, с глухим отверстием со стороны поверхности соприкосновения с деталью, пластина из эластичного материала выполнена с выступом в виде кольца, внутренний диаметр которого равен диаметру глухого отверстия в пластине, причем в кольце выполнены продольные прорези.
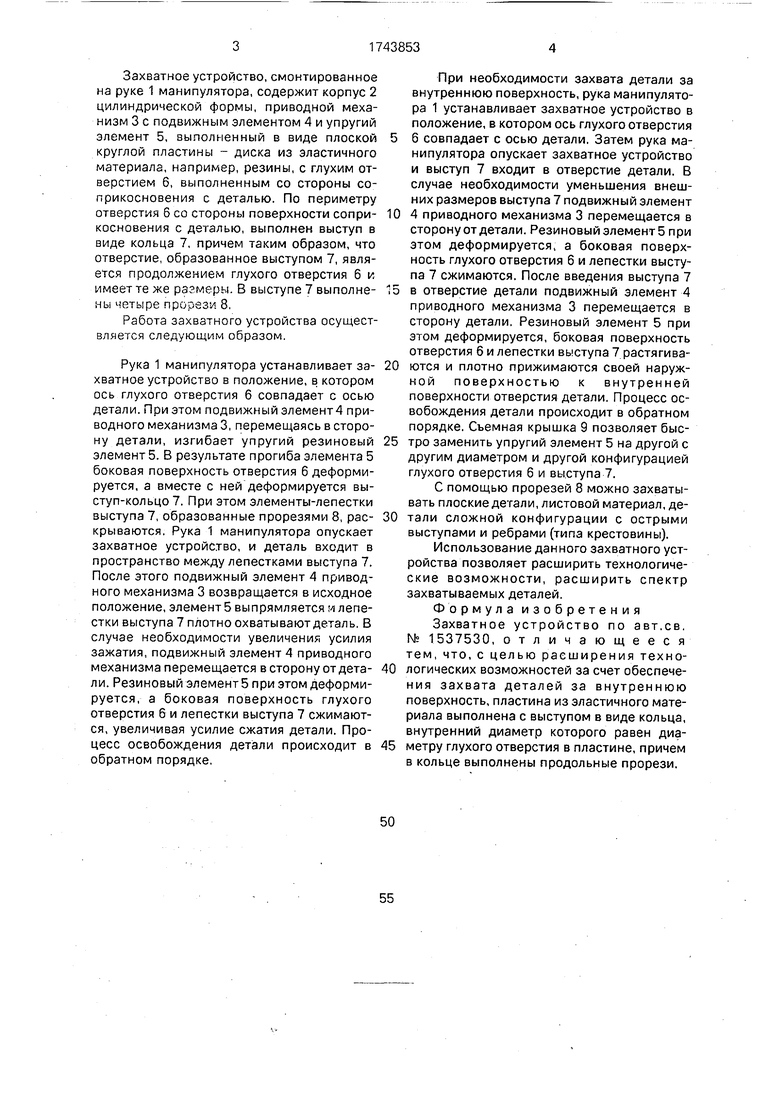
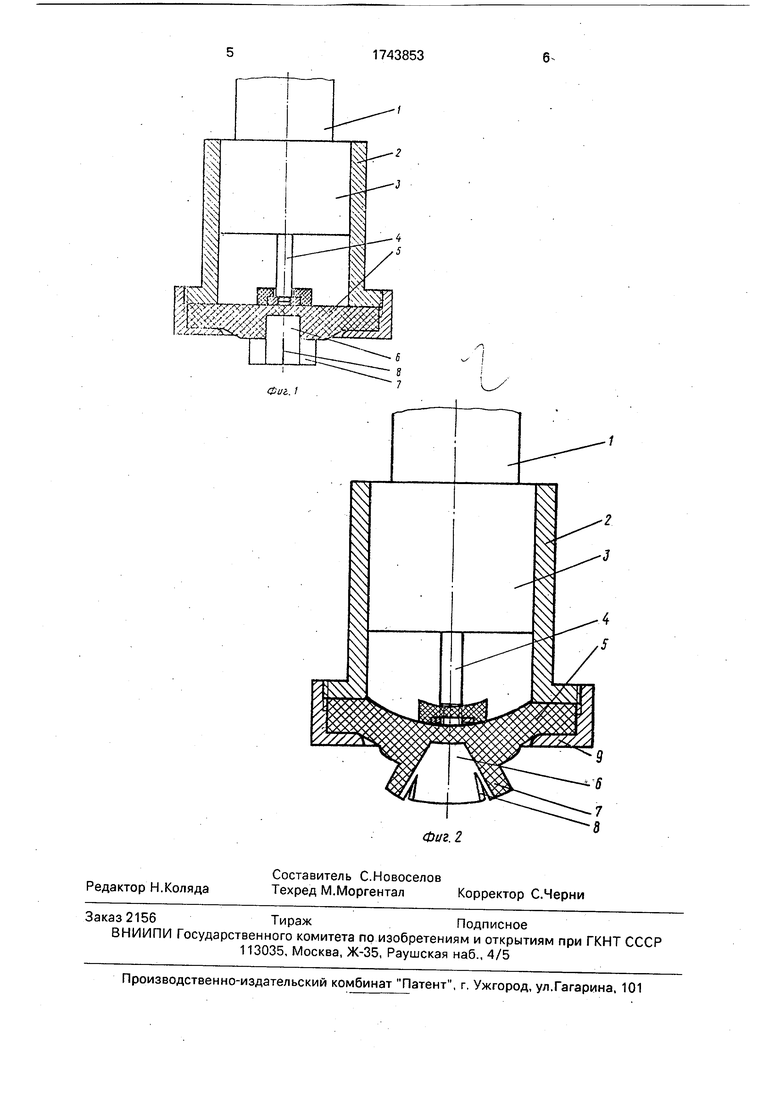
На фиг.1 изображено захватное устройство, продольный разрез; на фиг.2 - то же, с деформацией эластичной пластины.
XI
4 СО
со ел со
го
Захватное устройство, смонтированное на руке 1 манипулятора, содержит корпус 2 цилиндрической формы, приводной механизм 3 с подвижным элементом 4 и упругий элемент 5, выполненный в виде плоской круглой пластины - диска из эластичного материала, например, резины, с глухим отверстием 6, выполненным со стороны соприкосновения с деталью. По периметру отверстия 6 со стороны поверхности сопри- косновения с деталью, выполнен выступ в виде кольца 7, причем таким образом, что отверстие, образованное выступом 7, является продолжением глухого отверстия 6 и имеет те же размеры. В выступе 7 выполне- ны четыре прорези 8,
Работа захватного устройства осуществляется следующим образом.
Рука 1 манипулятора устанавливает за- хватное устройство в положение, в котором ось глухого отверстия 6 совпадает с осью детали. При этом подвижный элемент4 приводного механизма 3, перемещаясь в сторону детали, изгибает упругий резиновый элемент 5. В результате прогиба элемента 5 боковая поверхность отверстия 6 деформируется, а вместе с ней деформируется выступ-кольцо 7. При этом элементы-лепестки выступа 7, образованные прорезями 8, рас- крываются. Рука 1 манипулятора опускает захватное устройство, и деталь входит в пространство между лепестками выступа 7. После этого подвижный элемент 4 приводного механизма 3 возвращается в исходное положение, элемент 5 выпрямляется и лепестки выступа 7 плотно охватывают деталь. В случае необходимости увеличения усилия зажатия, подвижный элемент 4 приводного механизма перемещается в сторону от дета- ли. Резиновый элемент 5 при этом деформируется, а боковая поверхность глухого отверстия 6 и лепестки выступа 7 сжимаются, увеличивая усилие сжатия детали. Процесс освобождения детали происходит в обратном порядке.
При необходимости захвата детали за внутреннюю поверхность, рука манипулятора 1 устанавливает захватное устройство в положение, в котором ось глухого отверстия 6 совпадает с осью детали. Затем рука манипулятора опускает захватное устройство и выступ 7 входит в отверстие детали. В случае необходимости уменьшения внешних размеров выступа 7 подвижный элемент 4 приводного механизма 3 перемещается в сторону от детали. Резиновый элемент 5 при этом деформируется, а боковая поверхность глухого отверстия 6 и лепестки выступа 7 сжимаются. После введения выступа 7 в отверстие детали подвижный элемент 4 приводного механизма 3 перемещается в сторону детали. Резиновый элемент 5 при этом деформируется, боковая поверхность отверстия 6 и лепестки выступа 7 растягиваются и плотно прижимаются своей наружной поверхностью к внутренней поверхности отверстия детали. Процесс освобождения детали происходит в обратном порядке. Съемная крышка 9 позволяет быстро заменить упругий элемент 5 на другой с другим диаметром и другой конфигурацией глухого отверстия 6 и выступа 7.
С помощью прорезей 8 можно захватывать плоские детали, листовой материал, детали сложной конфигурации с острыми выступами и ребрами (типа крестовины).
Использование данного захватного устройства позволяет расширить технологические возможности, расширить спектр захватываемых деталей.
Формула изобретения
Захватное устройство по авт.св. № 1537530, отличающееся тем, что, с целью расширения технологических возможностей за счет обеспече- ния захвата деталей за внутреннюю поверхность, пластина из эластичного материала выполнена с выступом в виде кольца, внутренний диаметр которого равен диаметру глухого отверстия в пластине, причем в кольце выполнены продольные прорези.
Фаг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство конструкции Г.М.Хачатряна и С.А.Новоселова | 1988 |
|
SU1537530A1 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
| Захватное устройство | 1990 |
|
SU1768383A2 |
| Захватное устройство | 1989 |
|
SU1743854A1 |
| Устройство для дорнования отверстия трубы | 1990 |
|
SU1706847A1 |
| Вакуумный захватный орган | 1985 |
|
SU1294434A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2017 |
|
RU2667401C1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| ВСПОМОГАТЕЛЬНАЯ РУКОЯТКА | 2010 |
|
RU2522405C2 |
Использование: в станкостроении в захватных устройствах промышленных роботов и манипуляторов. Сущность изобретения в возможности обеспечения захвата деталей за внутреннюю поверхность за счет выполнения пластины 5 из пластичного материала с выступом 7 в виде кольца с продольными прорезями 8. В результате прогиба элемента 5 лепестки выступа 7, образованные прорезями 8, раскрываются. Деталь входит в пространство между лепестками выступа 7. Элемент 5 выпрямляется и лепестки выступа 7 охватывают деталь. При необходимости захвата за внутреннюю поверхность, выступ 7 входит в отверстие детали, резиновый элемент 5 деформируются, лепестки выступа 7 растягиваются и плотно прижимаются наружной поверхностью к внутренней поверхности отверстия детали.2 ил.
| Захватное устройство конструкции Г.М.Хачатряна и С.А.Новоселова | 1988 |
|
SU1537530A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
