Изобретение относится к машиностроению в частности к автоматизации процессов листовой штамповки с использованием манипуляторов, оснащенных захватами.
Известен электромагнитный схват манипулятора, содержащий два параллельно расположенных полюсных стержня и установленный между ними сердечник с обмоткой, а также датчики магнитного потока, выходы которых связаны с системой управления.
Недостатком схвата является сложность конструкции из-за необходимости перемещения герконов, а также трудоемкость его настройки, заключающаяся в подборе положения герконов, один из которых должен настраиваться на одну заготовку, а другой - на две заготовки.
Цель изобретения - упрощение конструкции и эксплуатации.
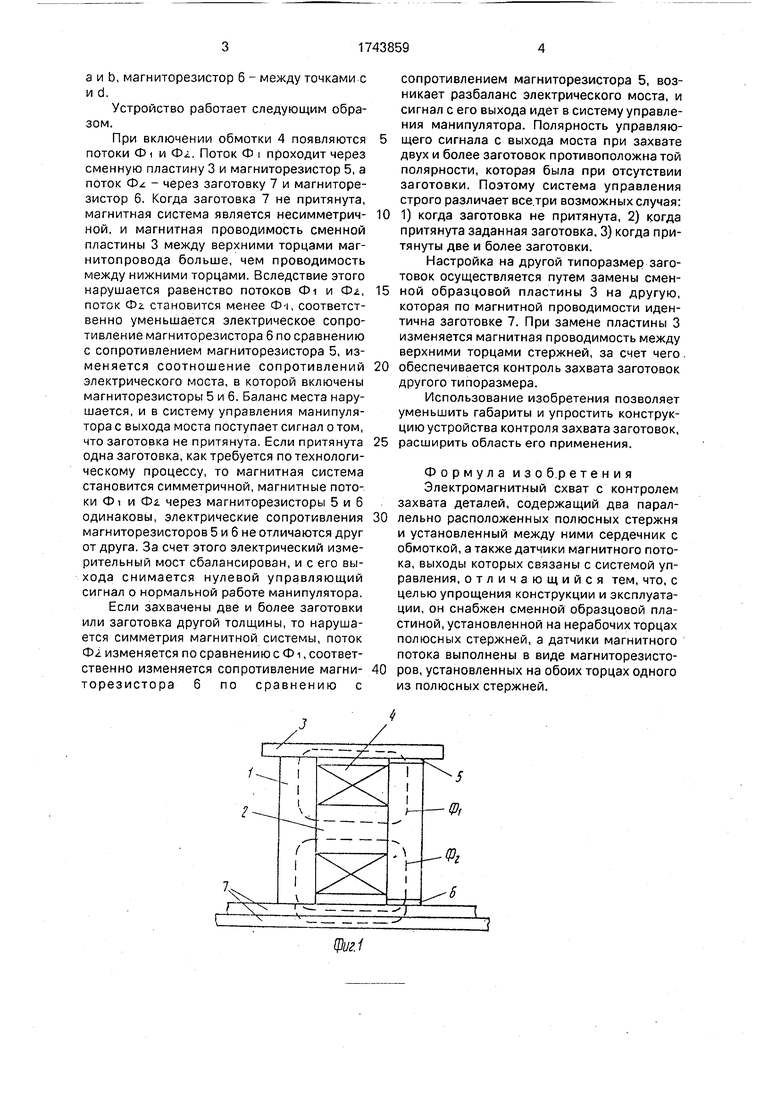
На фиг.1 изображено устройство, общий вид; на фиг.2 - электрическая схема
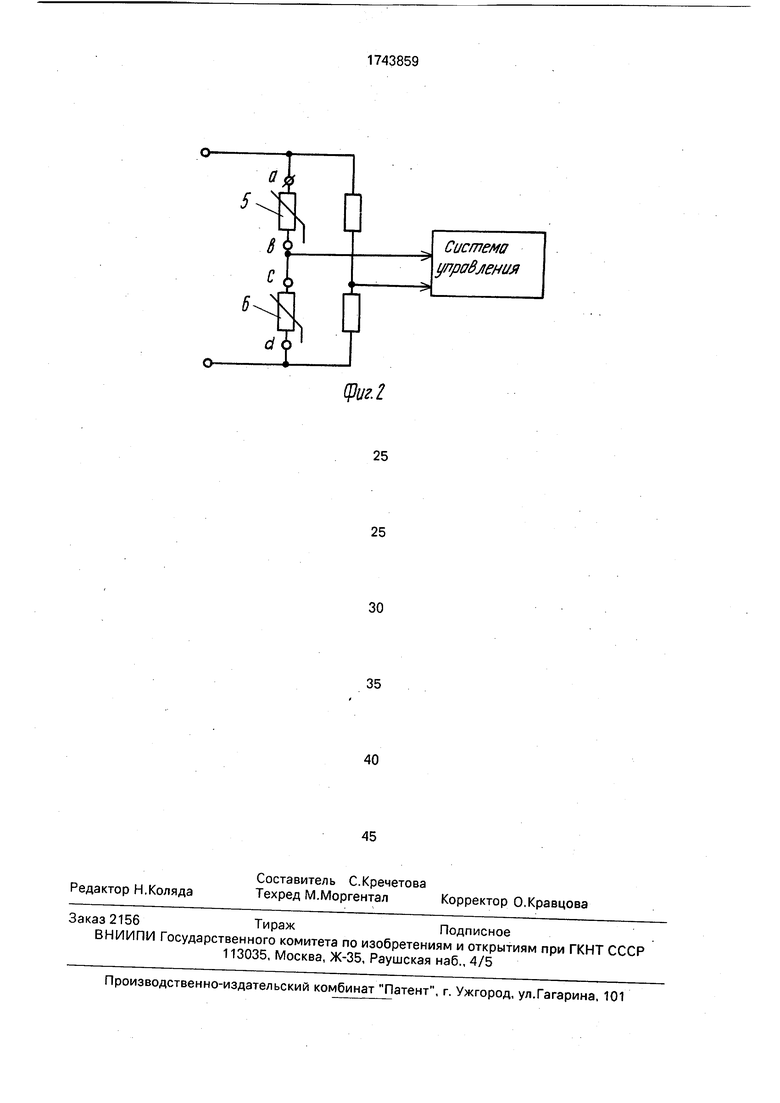
включения магниторезисторов в систему управления.
Устройство содержит магнитную систему, электрическую обмотку и два магниторе- зистора. Магнитная система состоит из двух стержней 1, сердечника 2 и сменной образцовой пластины 3. На сердечнике 2 расположена электрическая обмотка 4. В нерабочем торце любого из стержней 1 под сменной образцовой пластиной 3 закреплен магниторезистор 5, и такой же магнито- резистор 6 заложен в рабочий торец стержня, соприкасающийся с контролируемой заготовкой 7.
Вместе с притянутой заготовкой 7, когда ее параметры идентичны параметрам сменной пластины 3, устройство представляет замкнутую систему, симметричную от- носительно оси обмотки 4. При этом магнитный поток Ф1 через пластину 3 и поток Ф. через заготовку 7 равны между собой. Магниторезистор 5 подключен к мостовой электрической схеме между точками
(Л
С
VI
со
00
ел о
а и Ь, магниторезистор 6 - между точками с и d.
Устройство работает следующим образом.
При включении обмотки 4 появляются потоки Ф и Oi. Поток Ф i проходит через сменную пластину 3 и магниторезистор 5, а поток Ф. - через заготовку 7 и магниторезистор 6. Когда заготовка 7 не притянута, магнитная система является несимметрич- ной, и магнитная проводимость сменной пластины 3 между верхними торцами маг- нитопровода больше, чем проводимость между нижними торцами. Вследствие этого нарушается равенство потоков Ф1 и Фг, поток Фг становится менее Ф-i, соответственно уменьшается электрическое сопротивление магниторезистора 6 по сравнению с сопротивлением магниторезистора 5, изменяется соотношение сопротивлений электрического моста, в которой включены магниторезисторы 5 и 6. Баланс места нарушается, и в систему управления манипулятора с выхода моста поступает сигнал о том, что заготовка не притянута. Если притянута одна заготовка, как требуется по технологическому процессу, то магнитная система становится симметричной, магнитные потоки Фч и Фг через магниторезисторы 5 и 6 одинаковы, электрические сопротивления магниторезисторов 5 и 6 не отличаются друг от друга. За счет этого электрический измерительный мост сбалансирован, и с его выхода снимается нулевой управляющий сигнал о нормальной работе манипулятора.
Если захвачены две и более заготовки или заготовка другой толщины, то нарушается симметрия магнитной системы, поток Ф2 изменяется по сравнению с Ф1, соответственно изменяется сопротивление магни- торезистора 6 по сравнению с
сопротивлением магниторезистора 5, возникает разбаланс электрического моста, и сигнал с его выхода идет в систему управления манипулятора. Полярность управляющего сигнала с выхода моста при захвате двух и более заготовок противоположна той полярности, которая была при отсутствии заготовки. Поэтому система управления строго различает все.три возможных случая: 1) когда заготовка не притянута, 2) когда притянута заданная заготовка, 3) когда притянуты две и более заготовки.
Настройка на другой типоразмер заготовок осуществляется путем замены сменной образцовой пластины 3 на другую, которая по магнитной проводимости идентична заготовке 7. При замене пластины 3 изменяется магнитная проводимость между верхними торцами стержней, за счет чего. обеспечивается контроль захвата заготовок другого типоразмера.
Использование изобретения позволяет уменьшить габариты и упростить конструкцию устройства контроля захвата заготовок, расширить область его применения.
Формула изоб.ретения Электромагнитный схват с контролем захвата деталей, содержащий два параллельно расположенных полюсных стержня и установленный между ними сердечник с обмоткой, а также датчики магнитного потока, выходы которых связаны с системой управления, отличающийся тем, что, с целью упрощения конструкции и эксплуатации, он снабжен сменной образцовой пластиной, установленной на нерабочих торцах полюсных стержней, а датчики магнитного потока выполнены в виде магниторезисторов, установленных на обоих торцах одного из полюсных стержней.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата листовых заготовок | 1989 |
|
SU1785895A1 |
| Устройство контроля захвата листовых заготовок | 1988 |
|
SU1613320A1 |
| Датчик перемещения | 1974 |
|
SU507776A1 |
| Реверсивный бесконтактный тахогенератор постоянного тока | 1973 |
|
SU458075A1 |
| АВТОМОБИЛЬНЫЙ ГЕНЕРАТОР | 2006 |
|
RU2319278C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ И ВЯЗКОСТИ ЖИДКОСТИ В СКВАЖИНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2284500C2 |
| Устройство для контроля магнитной проницаемости | 1983 |
|
SU1145314A1 |
| Трехфазный трансформатор | 1991 |
|
SU1836738A3 |
| Трансформаторный преобразователь перемещений | 1985 |
|
SU1357693A1 |
| Схват загрузочного устройства для металлорежущего станка | 1983 |
|
SU1400496A3 |
Использование: в машиностроении, в захватных органах манипуляторов. Сущность изобретения: схват содержит два па- раллельно расположенных полюсных стержня 1 и установленный между ними сердечник 2 с обмоткой 4. На нерабочих торцах полюсных стержней установлена сменная образцовая пластина 3. А в обоих торцах одного из полюсных стержней установлены датчики магнитного потока. Параметры захватываемой заготовки 7 идентичны параметрам сменной пластины. При этом магнитные потоки Ф и Фг, проходящие через пластину и заготовку, равны между собой. Если заготовка не притянута или захвачены две и более заготовки, то равенство магнитных потоков нарушается и в систему управления поступает соответствующий сигнал.2 ил.
Система управления
(Риг. 2
| Схват манипулятора | 1985 |
|
SU1284832A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
