i
изобретение относится к текстильному машиностроению и предназначено для использования при подаче основы на ткацких станках.
Цель изобретения - повьшение качества пыраба1ываемой ткани путем увеличения равномерности схода основных навоев.
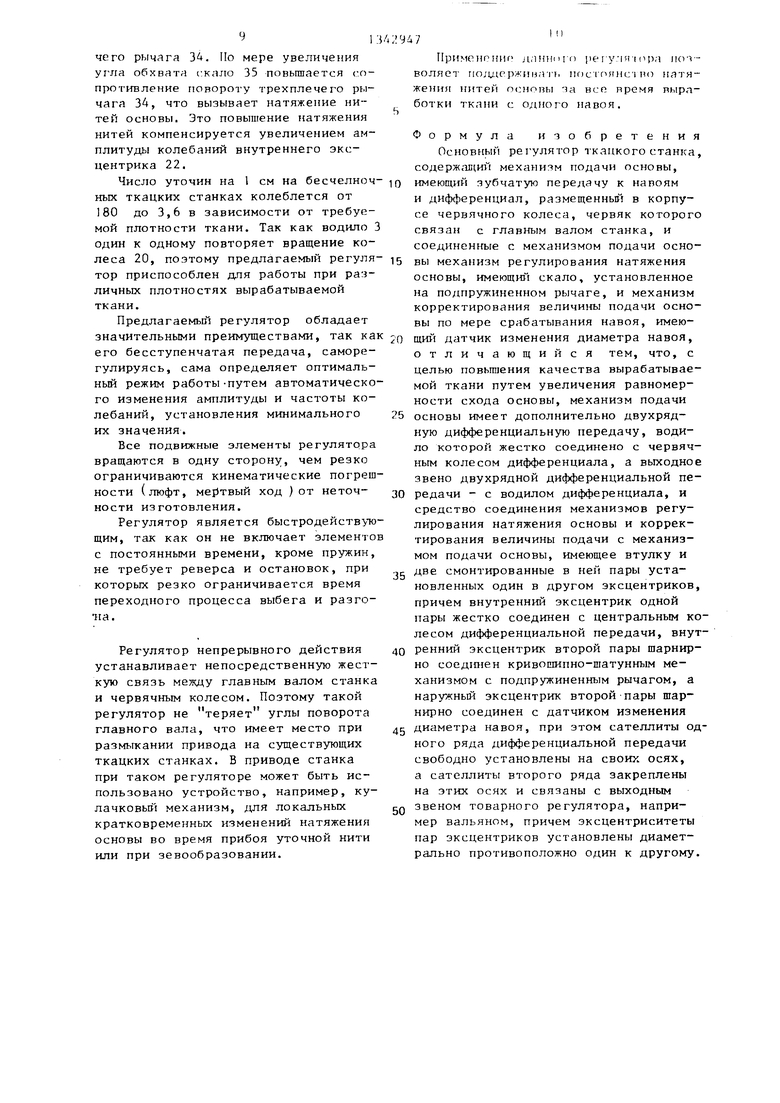
На фиг.1 и 2 показана кинематичес кая схема регулятора; на фиг.З - картина скоростей вращающихся элементов механизма.
Механизм подачи основы с навоя 1 имеет дифференциал, ведомое централь ное колесо 2 которого и водило 3 установлены подвижно на валу 4 подна- войных шестерен 5, зацепленных с на- войными колесами 6. Шестерни 5, колеса 6 и дифференциал станка получают движение непосредственно от водила, являющегося выходным эвеном дифферен илальной саморегулируемой передачи, которая приводится в движение от червячного колеса 7, являющегося для не ведущим водилом. Дифференциал станка составлен из центральных колес 8, взаимосвязанных между собой сателлитов 9 и 10, осей 11 сателлитов, соединенных подвижно с водилом 3. Число колес 6 и 8, шестерен 5 соответствует числу навоев 1. Червяк 12, зацепленный с колесом 7, установлен непосредственно на наборном валу 13 станк и в зависимости от положения крестовины 14,закрепленной на валу 13 подвижно в осевом направлении с помощью направляющей шпонки 15, соединяется либо с валом 13, либо с маховиком 16 ручного привода. Водило 3 и колесо 2 зацеплены с сателлитами 17, установленными на осях 18 подвижно. На этих же осях 18 закреплены неподвижно вторые сателлиты 19 блока передачи, выбранные по модулю и числу зубьев одинаковыми сателлитами 17.
Сателлиты 17 и 19, оси 18 составляют один блок частного варианта редуктора Давида с двумя внутренними зацеплениями, в котором центральные колеса имеют одинаковые параметры. Сателлиты 19 зацеплены с вторым входным колесом 20, кинематически связанным с выходным звеном товарного регулятора, например с вальяном (не показан). Водилом блока сателлитов 17 и 19 является червячное колесо 7. Так как сателлиты 17 установлены на осях 18 подвижно и тем самым этот ояд
5 0 5 0 Q
5
5
редуктора преобратоватг в ди(1к} ере11ци- альны11, поэтому два выхода fi oro ряда, а именно водило 3 и колесо 2, должны быть замкнуты замыкающе11 цепочкой. В замыкающую цепь включены внутренние 21 и 22, наружные 23 и 24 эксцентрики, имеющие равные по модулю эксцентриситеты. Внутренний эксцентрик 21 выполнен совместно с колесом 2, на него одет свободный наружный эксцентрик 23. Второй внутренний эксцентрик 22 аналогичен первому, но установлен диаметрально противоположно ему во втором наружном эксцентрике 24. Эксцентрик 24 подобен эксцентрику 23, но он не свободен, а кинематически связан с датчиком изменения диаметра навоя 1. На оба наружных эксцентрика 23 и 24 одеты шарикоподшипники 25, на которые, в свою очередь, насажена втулка 26, имеющая два диаметрально противоположно расположенных паза, выполненные по ее образующим. В эти пазы введены пальш-i 27, закрепленные на ступице водила 3.
Датчик изменения диаметра навоя 1 выполнен в виде шарнирного двухкоро- мыслового четырехзвенника, одно из коромысел 28 которого соединено с наружным эксцентриком 24, второе коромысло 29 большей длины шарнирно соединено со стойкой. Оба коромысла 28 и 29 соединены шарнирно шатуном 30, касающимся своим отростком (не показан) поверхности навоя 1. Коромысло 29 подпружинено пружиной 31. Внутренний эксцентрик 22 соединен шарнирно с телескопическим шатуном 32, связанным подвижно с плечом 33 трехплечего рычага 34. Телескопический шатун 32 позволяет изменять местоположение скало 35 без нарушения связи между трехплечим рычагом 34 и дифференциалом станка. Скало 35 расположено на рычаге 34, плечо 36 которого соединено шарнирно с пружиной 37, второй конец которой связан со стойкой или с остовом станка. Плечо 33 установлено на эксцентрике 38, расположенном на оси трехплечего рычага 34. Положение эксцентрика 38 на оси может быть изменено поворотом коромысла 39 в зависимости от угла обхвата скало 35 нитями основы, для этого коромысло 39 шарнирно соединено с шатуном 40, а последни - с вторым коромыслом 41, подвешенном на оси ска- до 35. Kopo fыcлo 4 несет на себе
iiiTiinry 42, упирающуюся сцоим плоским торцом в нити основы. Эксцентрик 38 подпружинен, пружина закручивания (фиг.1, не показана) одним концом пне дена в ступицу трехплечего рычага 34, а вторым концом - в эксцентрик 38.
Все подвижные элементы регулятора, кроме колеса 20, сателлитов 19 и рычажных плоских механизмов, размещены в полости червячного колеса 7. Саморегулируемая передача механизма отпуска основы выполнена на базе частного варианта редуктора Давида с одинаковыми параметрами центральных колес с одной стороны и сателлитов блока с другой, в котором один из рядов преобразован в дифференциальный замкнутый. Особенность механизма отпуска нитей основы заключается в том, что он установлен в такой цеци обратной связи, в какой нет непосредственной жесткой связи между регулируемым объектом нитями основы и входным элементом регулятора. Поэтому (механизм отпуска нитей выполнен в виде многопоточного регулятора, кинематически связывающего дифференциал привода станка со всеми подвижными звеньями, изменяющими свои геометрические {диаметр навоя ), силовые (натяжение пружины колебательного контура ), кинематические (скорость вращения выходного звена товарного регулятора) параметры по мере схода нитей с навоев. Трехплечий рычаг, совершающий возвратно-качательное движение, является и одним из основных входных звеньев регулятора, датчиком натяжения нитей основы. Колебательный контур об разовая пружиной и инерционными массами (скало, сам трехплечий рычаг и другие детали ). Согласно дифференциальному уравнению
V-I пр C(t КМ;
где (у - угловое ускорение качательно- го движения инерционных масс; Inp - приведенный момент инерции
масс;
С - восстанавливающий момент пружины;
С/ - угол поворота трехплечего рычага;
М - обобщенный момент; К - коэффициент пропорциональности.
Такой колебательный контур служит генератором переменного момента само„
регулпруемо бесступенчатой передачи. Дня преобразования диффереш1иального ряда механизма отпуска основы, имеюg щего три степени свободы, в саморегулируемую передачу с использованием колебательного контура станка необходимо осур1ествлять такие связи, при которых на установившемся режиме по
10 крайней мере одна из обобщенных скоростей была бы периодической функцией времени и имела бы постоянную составляющую, пропорциональную угловой скорости u) ведомого вала (центрального
15 солнечного колеса ), и переменную составляющую О),, пропорциональную угловой скорости U) ведущего приводного
4
звена, а именно водила передачи - червячного колеса привода. Движение са- 20 морегулируемого дифференциального ряда описьшается уравнением
и со + Uj О), + и tOj О,
где и,и ,llj - передаточные отноше- 25ния, удовлетворяющие
условию , 0; ш, , ы.ы - мгновенные угловые частоты вращения колеблющегося второго плеча 30трехплечего рычага,
связанного с ним внутреннего эксцентрика, ведомого (вращающегося в одном направлении центрального солнечного колеса) и свободного (установленного на выходе передачи эпицикла - водила дифференциала) элементов. Если колеблющийся элемент совершает гармонические колебания с угловой частотой
35
40
МС1КС Н
где с/ - максимальньй угол откло- 1 /иокс
нения колеблющегося элемента от среднего положения;
ы - угловая частота вращения приводного ведущего звена саморегулируемой передачи, в данном случае червячного колеса - водила,
то угловая частота вращения эпицикла
и 2и , ,
и - -г.-- W.- --,-- У,
Mtatic
лsinWцt. .
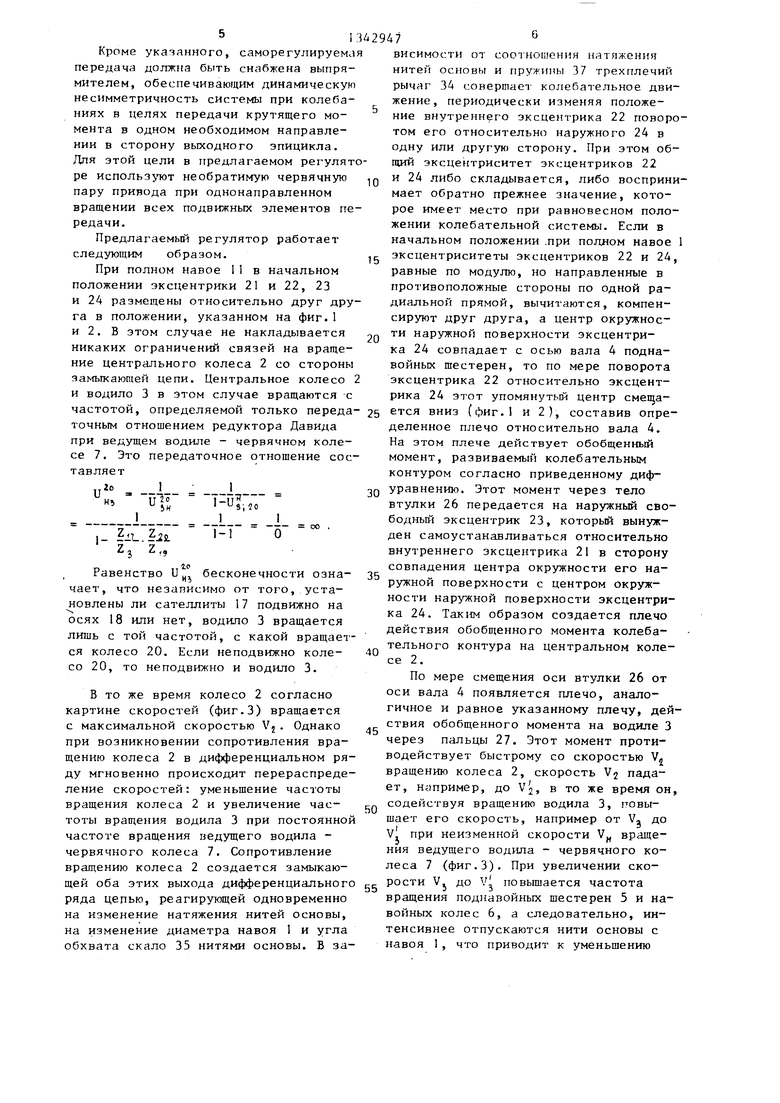
Кроме указанного, саморегулируемая передача должна быть снабжена выпрямителем, обеспечивающим динамическую несимметричность системы при колебаниях в целях передачи крутящего момента в одном необходимом направлении в сторону выходного эпицикла. Для этой цели в предлагаемом регуляторе использ тот необратимую червячную пару привода при однонаправленном вращении всех подвижных элементов передачи.
Предлагаемый регулятор работает следующим образом.
При полном навое I1 в начальном положении эксцентрики 21 и 22, 23 и 24 размещены относительно друг друга в положении, указанном на фиг.1
20
висимости от соотношения натяжения нитей основы и пружины 37 трехплечий рычаг 34 совершае колебательное движение, периодически изменяя положение внутреннего эксцентрика 22 поворотом его относительно наружного 24 в одну или другую сторону. При этом об- ПЦ1Й эксцентриситет эксцентриков 22 и 24 либо складывается, либо воспринимает обратно прежнее значение, которое имеет место при равновесном положении колебательной системы. Если в начальном положении .при полном навое 1 эксцентриситеты эксцентриков 22 и 24, равные по модулю, но направленные в противоположные стороны по одной радиальной прямой, вычитаются, компенсируют друг друга, а центр окружности наружной поверхности эксцентрика 24 совпадает с осью вала 4 подна- войных шестерен, то по мере поворота эксцентрика 22 относительно эксцентрика 24 этот упомянутый центр CMei aпри ведущем водиле - червячном колесе 7. Это передаточное отношение составляет
и 2. В этом случае не накладывается никаких ограничений связей на вращение центрального колеса 2 со стороны замыкающей цепи. Центральное колесо 2 и водило 3 в этом случае вращаются с
частотой, определяемой только переда- 25 ется вниз (фиг.1 и 2), составив опре- точным отношением редуктора Давида деленное плечо относительно вала 4.
На этом плече действует обобщенный момент, развиваемый колебательным контуром согласно приведенному диф- 30 уравнению. Этот момент через тело
втулки 26 передается на наружный свободный эксцентрик 23, который вынужден самоустанавливаться относительно внутреннего эксцентрика 21 в сторону совпадения центра окружности его наружной поверхности с центром окружности наружной поверхности эксцентрика 24. Таким образом создается плечо действия обобщенного момента колебательного контура на центральном колесе 2.
По мере смещения оси втулки 26 от оси вала 4 появляется плечо, аналогичное и равное указанному плечу, действия обобщенного момента на водиле 3 через пальцы 27. Этот момент противодействует быстрому со скоростью Vj вращению колеса 2, скорость Vj падает, нгшример, до V2, в то же время он, содействуя вращению водила 3, повышает его скорость, например от Vj до v при неизменной скорости У„ вращеРавенство U... бесконечности озна- 35
п 3
чает, что независимо от того, установлены ли сателлиты 17 подвижно на осях 18 или нет, водило 3 вращается лишь с той частотой, с какой вращается колесо 20. Если неподвижно колесо 20, то неподвижно и водило 3.
40
45
50
В то же время колесо 2 согласно картине скоростей (фиг.З) вращается с максимальной скоростью Vj. Однако при возникновении сопротивления вращению колеса 2 в дифференциальном ряду мгновенно происходит перераспределение скоростей: уменьшение частоты вращения колеса 2 и увеличение частоты вращения водила 3 при постоянной частоте вращения ведущего водила - червячного колеса 7. Сопротивление вращению колеса 2 создается замыкающей оба этих выхода дифференциального gg ряда цепью, реагирующей одновременно на изменение натяжения нитей основы, на изменение диаметра навоя I и угла обхвата скало 35 нитями основы. В запри неизменной скорости V ния ведущего водила - червячного ко леса 7 (фиг.З). При увеличении скои 3
рости V. до v; повьш ается частота
вращения поднавойных шестерен 5 и на- войных колес 6, а следовательно, интенсивнее отпускаются нити основы с навоя 1, что приводит к уменьшению
0
5
0
висимости от соотношения натяжения нитей основы и пружины 37 трехплечий рычаг 34 совершае колебательное движение, периодически изменяя положение внутреннего эксцентрика 22 поворотом его относительно наружного 24 в одну или другую сторону. При этом об- ПЦ1Й эксцентриситет эксцентриков 22 и 24 либо складывается, либо воспринимает обратно прежнее значение, которое имеет место при равновесном положении колебательной системы. Если в начальном положении .при полном навое 1 эксцентриситеты эксцентриков 22 и 24, равные по модулю, но направленные в противоположные стороны по одной радиальной прямой, вычитаются, компенсируют друг друга, а центр окружности наружной поверхности эксцентрика 24 совпадает с осью вала 4 подна- войных шестерен, то по мере поворота эксцентрика 22 относительно эксцентрика 24 этот упомянутый центр ется вниз (фиг.1 и 2), составив опре- деленное плечо относительно вала 4.
По мере смещения оси втулки 26 от оси вала 4 появляется плечо, аналогичное и равное указанному плечу, действия обобщенного момента на водиле 3 через пальцы 27. Этот момент противодействует быстрому со скоростью Vj вращению колеса 2, скорость Vj падает, нгшример, до V2, в то же время он содействуя вращению водила 3, повышает его скорость, например от Vj до v при неизменной скорости У„ вращепри неизменной скорости V ния ведущего водила - червячного ко леса 7 (фиг.З). При увеличении скои 3
рости V. до v; повьш ается частота
вращения поднавойных шестерен 5 и на- войных колес 6, а следовательно, интенсивнее отпускаются нити основы с навоя 1, что приводит к уменьшению
7
натяжения нитей основы по сравнению с натяжением пружины 37, к повороту трехилечего рычага 34 по часовой стрелке. При этом эксцентрик 22, поворачиваясь относительно эксцентрика 24, смещает упомянутый центр относ тельно оси вала 4 вверх (фиг.1 и 2), что явится причиной уменьшения сопротивления вращению колеса 2, повышения скорости его вращения и уменьшения скорости вращения водила 3 вплоть до установления равновесного положения трехплечего рычага 34. Затем цикл повторяется.
Так производится внутрицикловое автоматическое регулирование натяжения нитей основы, то убавляя, то прибавляя внешний движущий момент от червячного колеса 7 на величину об- общенного момента, приведенного к колесам 2 и 3. Колебания рычага 34, являясь таким образом генератором переменного момента, обеспечивают внутри- цикловое постоянство натяжения нитей, саморегулируясь, поддерживают непрерывную связь между входным и выходным параметрами, поддерживая динамическое равновесие системы. Причем восстановление равновесия происходит относи- тельно быстро с незначительными постоянными времени, вводимыми пружинами 37 и пружиной закручивания эксцентрика 38, опираясь согласно картине скоростей (фиг.З) на постоянную установившуюся скорость V ведущего водила - червячного колеса 7 при практически неподвижных эксцентриках 22 и 24. Другие параметры настройки регулятора, обеспечиваемые гибкой обратной связью с помощью указанных пружин, устанавливаются путем изменения предварительного натяжения пружин 37 и угла закручивания пружины эксцентрика 38, обеспечивая тем самым согласование этих параметров с временем движения значительных масс по инерции.
Устойчивость предлагаемого регулятора обеспечивается тем, что, как известно, каждая механическая колебательная система стремится сохранить минимально возможные амплитуду и частоту колебаний согласно описанному уравнению.
Колебание рычага 34 служит датчиком натяженш нитей основы, а саморегулируемая дифференциальная передача обеспечивает относительно быструю
10
15
2о25 зо29478
реакцию на сигнал этого датчика, что определяет быстродействие регулятора. По мере выработки ткани, схода нитей основы с навоя 1 диаметр последнего уменьшается. В этом случае шатун 30 не препятствует постепенному повороту коромысел 28 и 29 по часовой стрелке, а следовательно, наружного эксцентрика 24 относительно внутреннего 22 под действием пружины 31. По мере поворота эксцентрика 24 центр окружности наружной его поверхности, ось втулки 26 смещаются вверх от оси вала 4, это явится причиной самоустановления эксцентрика 23 на эксцентрике 21, смещению центра наружной поверхности эксцентрика 23 вверх. При этом появляется плечо, на котором действует обобщенньй момент, сопротивляющийся крутящему моменту на колесе 2. Чем больше ось втулки 26 смещается вверх от оси вала 4, тем больше момент сопротивления, что явится при
чиной уменьшения скорости V, и увеличения скорости Vj .
В предлагаемом устройстве в предельном крайнем случае, когда диаметр навоя 1 минимален, наружные эксцентрики 23 и 24 повернутся относительно внутренних эксцентриков 21 и 22 на максимальньй угол, близкий 180°. В этом случае максимально отклоняется ось втулки 26 от оси вала 4, колесо 2 испытывает максимальное сопротивление, выражающееся в максимальном увеличении момента на водиле 3. Такое перераспределение моментов и скоростей осуществляется согласно третьему закону механики (силы действия и противодействия равны между собой. Так, в предельном случае устанавливаются минимальная скорость Vj колеса 2 и
максимальная скорость
, /I
V 1 водила 3.
Повьш1ение V j компенсирует уменьшение линейной скорости схода нитей основы с навоя при изменении его диаметра. Так, вне цикла увеличением скорости эпицикла 3 обеспечивается постоянство натяжения нитей основы. Поворот наружного эксцентрика 24 на 180 должен соответствовать изменению диаметра навоя 1 от 940 до 150 мм, обеспечить передаточное отношение, равное 6,26.
Изменение угла обхвата скало 35 по мере схода нитей основы с навоя 1 по- вьшгает длину рычага 33 путем поворота эксцентрика 38 вокруг оси трехпле
чего рычага 34. По мере увеличения уг ла обхвата скало 35 повышается сопротивление повороту трехплечего рычага 34, что вызывает натяжение нитей основы. Это повышение натяжения нитей компенсируется увеличением ам плитуды колебаний внутреннего эксцентрика 22.
Число уточин на 1 см на бесчелночных ткацких станках колеблется от 180 до 3,6 в зависимости от требуемой плотности ткани. Так как водило один к одному повторяет вращение колеса 20, поэтому предлагаемый регулятор приспособлен для работы при различных плотностях вырабатываемой ткани.
Предлагаемьв регулятор обладает значительными преимуществами, так ка его бесступенчатая передача, саморегулируясь, сама определяет оптимальный режим работы-путем автоматического изменения амплитуды и частоты колебаний, установления минимального их значения.
Все подвижные элементы регулятора вращаются в одну сторону, чем резко ограничиваются кинематические погрешности (люфт, мер1твый ход ) от неточности изготовления.
Регулятор является быстродействующим, так как он не включает элементо с постоянными времени, кроме пружин, не требует реверса и остановок, при которых резко ограничивается время переходного процесса выбега и разго- на.
Регулятор непрерывного действия устанавливает непосредственную жесткую связь между главным валом станка и червячным колесом. Поэтому такой регулятор не теряет углы поворота главного вала, что имеет место при размыкании привода на существующих ткацких станках. В приводе станка при таком регуляторе может быть использовано устройство, например, кулачковый механизм, ;щя локальных кратковременных изменений натяжения основы во время прибоя уточной нити или при зевообразовании.
;: у/,7
Прнменрлнг jb iHiiiirr) ре г улич орл iicrv- воляет riojuiPp«iiB;n f, пг)сч оя}1С 1 но натяжения нитей ооюпы ча всо время пыра- 1 ботки ткани с одного навоя.
Формула изобретения Основный регулятор ткацкого станка, содержащий механизм подачи основы,
0 имеющиР зубчатую передачу к напоям и дифференциал, размещенный в корпусе червячного колеса, червяк которого связан с главным валом станка, и соединенные с механизмом подачи осно15 вы механизм регулирования натяжения основы, имеющиГ скало, установленное на подпружиненном рычаге, и механизм корректирования величи1п 1 подачи основы по мере срабатывания навоя, имею0 щий датчик изменения диаметра навоя, отличающийся тем, что, с целью повышения качества вырабатываемой ткани путем увеличения равномерности схода Основы, механизм подачи
-5 основы имеет дополнительно двухрядную дифференциальную передачу, водило которой жестко соединено с червячным колесом дифференциала, а выходное звено двухрядной дифференциальной пе30 редачи - с водилом дифференциала, и средство соединения механизмов регулирования натяжения основы и корректирования величины подачи с механизмом подачи основы, имеющее втулку и
.jg две смонтированные в ней пары установленных один в другом эксцентриков, причем внутренний эксцентрик одной пары жестко соединен с центральным колесом дифференциальной передачи, внут40 ренний эксцентрик второй пары шарнир- но соед1шен кривошипно-шатунным механизмом с подпружиненным рычагом, а наружньй эксцентрик второй пары шар- нирно соединен с датчиком изменения
45 диаметра навоя, при этом сателлиты одного ряда дифференциальной передачи свободно установлены на своих осях, а сателлиты второго ряда закреплены на этих осях и связаны с выходным
Q звеном товарного регулятора, например вальяном, причем эксцентриситеты пар эксцентриков установлены диаметрально противоположно один к другому.
V-
V. V I - I
s
Фиг г


| название | год | авторы | номер документа |
|---|---|---|---|
| Основный регулятор ткацкого станка | 1988 |
|
SU1516537A1 |
| Основной регулятор ткацкого станка | 1986 |
|
SU1406236A1 |
| Основный регулятор ткацкого станка | 1989 |
|
SU1661253A1 |
| Основный регулятор ткацкого станка | 1989 |
|
SU1612009A1 |
| Основной регулятор ткацкого станка | 1986 |
|
SU1401085A1 |
| ОСНОВНЫЙ РЕГУЛЯТОР ТКАЦКОГО СТАНКА | 1991 |
|
RU2016934C1 |
| МЕХАНИЗМ ДЛЯ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ОСНОВНЫХ НИТЕЙ НА ТКАЦКОМ СТАНКЕ | 2003 |
|
RU2240389C1 |
| Основный регулятор ткацкого станка | 1983 |
|
SU1152984A1 |
| Устройство для подачи основных нитей к ткацкому станку с секционным навоем | 1988 |
|
SU1595959A1 |
| МЕХАНИЗМ ПОДАЧИ ОСНОВЫ ТКАЦКОГО СТАНКА | 1991 |
|
RU2015222C1 |

Изобретение относится к текстильному машиностроению, касается основного регулятора ткацкого станка и позволяет повысить качество вырабатываемой ткани- путем увеличения равномерности схода основы с навоя. Основный регулятор содержит механизм подачи основы, имеющий зубчатутп передачу к навоям и дифференциал, размещенный в корпусе червячного колеса, червяк которого связан с главным валом станка, и соединенные с механизмом подачи основы механизм регулирования натяжения основы, имеющий скало, установленное на подпружиненном рычаге, и механизм корректирования величины подачи основы по мере срабатывания навоя, имеющий датчик изменения диаметра навоя. Механизм подачи основы имеет дополнительно двухрядную дифференциальную передачу, водило 3 которой жестко соединено с червячным колесом 7 дифференциала, а выходное звено двухрядной дифференциальной передачи - с водилом дифференциала, и средство соединения механизмов регулирования натяжения основы и корректирования величины подачи с механизмом подачи основы, имеющее втулку и две смонтированные в Hei i пары установленных один в другом зксцентриков. 3 ил. (Л
Редактор Н.Гунько
Составитель Н.Фуражкин Техред М.Дидык
Заказ 4607/26 Тираж 424Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие,г. Ужгород,ул. Проектная, 4
Корректор М.Демчик
| Основный регулятор ткацкого станка | 1978 |
|
SU765420A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Лнуфриев П.И., Бузин Н.В.Ткацкий станок фирмы Зульцер | |||
| -М.,1959,с | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
