(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатное регистрирующее устройство | 1990 |
|
SU1719896A1 |
| Двухкоординатное регистрирующее устройство | 1989 |
|
SU1599656A1 |
| УСТРОЙСТВО ДЛЯ ЗАПИСИ И ОТОБРАЖЕНИЯ ИНФОРМАЦИИ | 1992 |
|
RU2101781C1 |
| Двухкоординатный регистрирующий прибор | 1982 |
|
SU1030653A1 |
| УСТРОЙСТВО ДЛЯ ЧТЕНИЯ СЛЕПЫМИ ПЕЧАТНОГО ТЕКСТА | 1972 |
|
SU351231A1 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| Двухкоординатный графопостроитель | 1991 |
|
SU1833901A1 |
| Устройство для отображения маркера на экране телевизионного индикатора | 1989 |
|
SU1837356A1 |
| ТРЕНАЖЕР МНЕМОСХЕМ | 1990 |
|
RU2101772C1 |
| Устройство для ввода графической информации | 1984 |
|
SU1247907A1 |
Изобретение относится к регистрирующим приборам и может быть использовано оператором как для регистрации информации со стационарных компьютеров, так и как вычислительно-регистрирующий автономный прибор. Цель изобретения -снижение габаритов, весэ и энергопотребления, расширение функциональных возможностей. Портативный двухкоординатный регистрирующий прибор содержит планшет с направляющими перемещаемую по направляющим траверсу, на которой установлена с возможностью перемещения по траверсе каретка с регистрирующим узлом, подключенным к блоку электропитания через блок управления, датчики положения регистрирующего узла. Держатель закреплен на каретке и используется оператором для перемещения каретки в четырех направлениях. 3 ил.
Изобретение относится к регистрирующим приборам и может быть использовано оператором как для регистрации информации со стационарных компьютеров, так и как вычислительно-регистрирующий автономный прибор.
Известно двухкоординатное регистрирующее устройство, содержащее планшет с направляющими, траверсу, перемещаемую по направляющим кинематической связью с приводом, каретку, установленную на траверсе и перемещаемую кинематической связью с приводом У, регистрирующий узел, установленный на каретке, механизм подъема регистрирующего узла, подключенный к блоку электропитания через блок управления.
Недостатком известных устройств являются их большие габариты и энергопотребление.
Известна конструкция двухкоординат- ного регистрирующего прибора, выбранного в качестве прототипа, содержащего планшет с направляющими, траверсу, на которой установлена каретка с регистрирующим узлом, подключенным к блоку электропитания через блок управления
Недостатком известной конструкции являются большие габариты и энергопотребление, высокая стоимость, отсутствие возможности использования как переносного автономного регистрирующего и печатающего устройства
Целью изобретения является повышение удобства в эксплуатации и снижение габаритов
Указанная цель достигается тем, что портативный регистрирующий прибор содержит держатель, закрепленный на каретке для захвата и геремещения пальцами руки оператора н четырех направлениях
XI N XI
4
(влево, вправо, вверх, вниз), блок контроля и сигнализации оператору скорости перемещения регистрирующего узла в направлении X. блок синхронизации, включенный между датчиком положения X и блоком управления. Указанная цель достигается тем, что красащая лента регистрирующего узла, работающего методом переноса красителя с красящей ленты, выполнена в виде кольца, обе ветви которой проходят между планшетом и регистрирующим узлом, а также тем, что блок управления содержит цифро-бук- венный индикатор, клавиатуру ввода символьной информации и микроЭВМ. Прибор выполнен в виде двух плоских блоков, складывающихся один в другой.
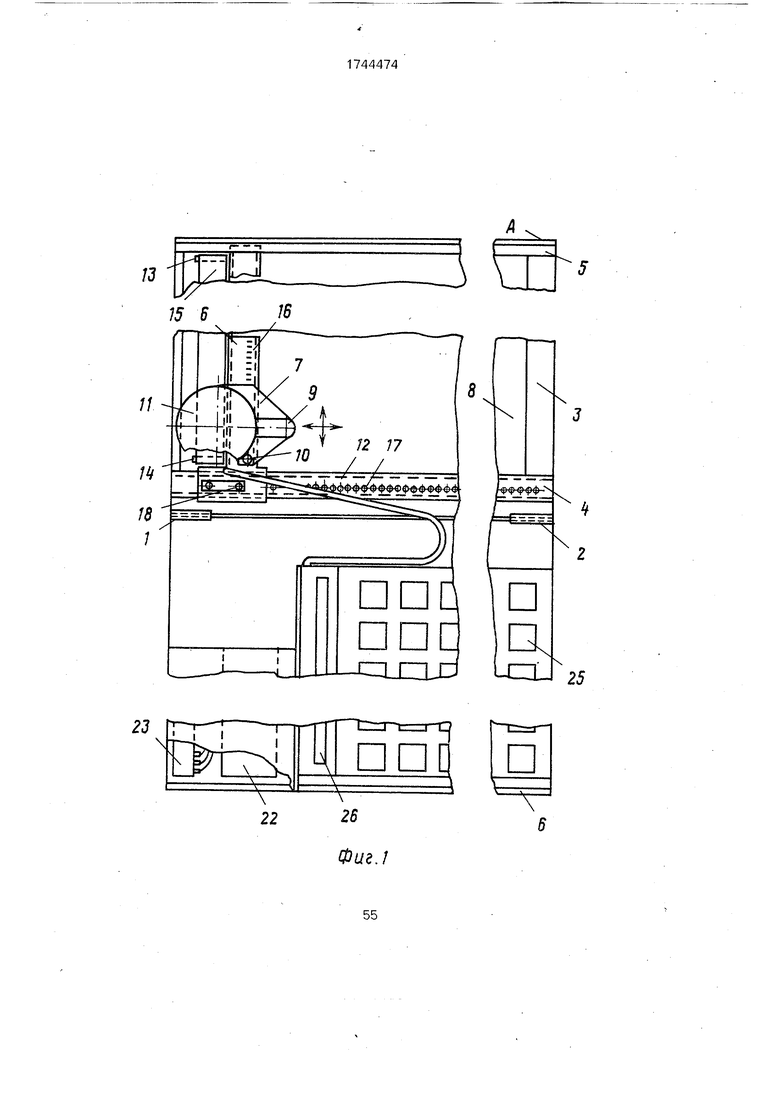
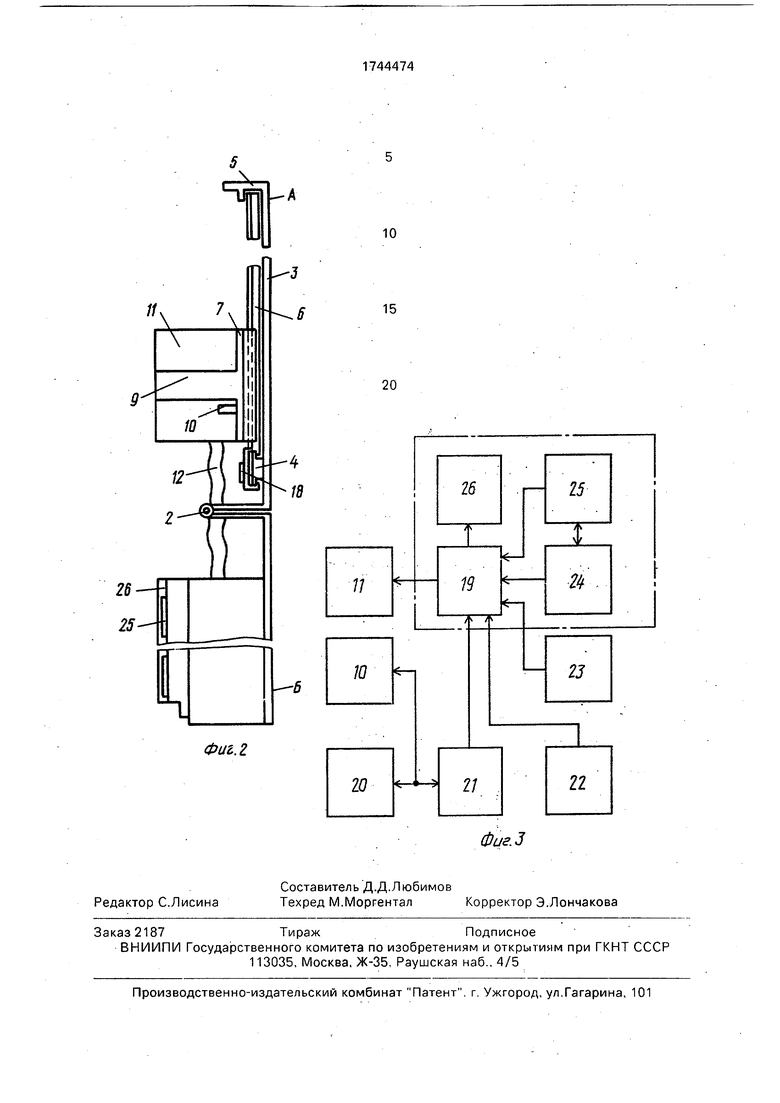
На фиг. 1 схематически показано предлагаемое устройство, вид сверху; на фиг. 2 - то же, вид сбоку; на фиг. 3 - блок-схема.
Портативный двухкоординатный регистрирующий прибор состоит из двух блоков: блока А и блока Б, скрепленных петлями 1 и 2. Блок А содержит планшет 3 с направляющими 4 и 5, траверсу 6 с кареткой 7. На плоскость планшета 3 между направляющими 4 и 5 устанавливают лист носителя 8 записи. На каретке 7 установлен держатель 9, светоизлучающий и светоприемный опт- рон 10 датчика положения и регистрирующий узел 11, подключены шлангом 12 электропитания. На траверсе 6 закреплены штыри 13 и 14 с установленной на них красящей лентой 15 и нанесены светоотражающие полосы 16. На направляющей 4 выполнены лунки или риски 17, а на траверсе 6 установлен фиксатор или фотодатчик 18.
Блок Б содержит блок 19 управления, блок 20 контроля и сигнализации, блок 21 синхронизации, блок 22 питания, разъем 23, микроЭВМ 24, клавиатуру 25, цифро-бук- венный индикатор 26 (фиг. 3). Электронные блоки 19, 20, 21 и 24 расположены внутри блока Б и на фиг. 1 и 2 не показаны.
Прибор работает следующим образом.
Через разъем 23 информация с персонального компьютера или другого внешнего прибора поступает в блок 19 управления. Оператор, пользуясь держателем 9, перемещает вручную каретку 7 с регистрирующим узлом 11 по траверсе 6 в направлении X вправо, влево. При этом датчик 10 положения, взаимодействуя со светоотражающими рисками 16, выдает импульсы в блок 20 контроля и сигнализации и блок 21 сигнализации. Блок контроля 20, сравнивая частоту поступающих импульсов с внутренней опорной частотой, определяет номинальную и предельную скорости перемещения держателя и сигнализирует оператору звуковыми и световыми средствами сигнализации соответственно низкой и высокой частотой звука, зеленым и красным цветом светоизлучения.
Блок 21 синхронизации вырабатывает
импульсы синхронизации через каждые 0,2 мм линейного перемещения каретки и выдает их в блок 19 управления, который формирует с блока 22 питания импульсы тока,
0 поступающего по шлангу 12 электропитания в регистрирующий узел 11, который, воздействуя на красящую ленту 15 давлением или температурой, остается след записи на носителе 8. После каждого возвращения
5 каретки в крайнее левое положение оператор, пользуясь держателем 9, перемещает в направлении Y (вниз, вверх), совместно с кареткой 7 траверсу 6 по направляющим 4 и 5 на новую строку. Место строки определя0 ется оператором или последовательным перемещением траверсы 6 сверху вниз, или произвольным выбором нужного места регистрации по осям X и Y. Высота строки и соответственно шаг перемещения траверсы
5 6, фиксируемый фиксатором 18, определяется расстоянием между лунками или рисками 17, которое равно высоте набора пишущих элементов в регистрирующем узле 11. Риски 16 на траверсе 6 вследствие
0 невозможности получения датчиком 10 импульсов с шагом 0,2 мм нанесены с шагом 3 мм, а блок 21 независимо от скорости перемещения каретки вырабатывает промежуточные 15 импульсов, поступающие всегда
5 через равное линейное расстояние 0,2 мм.
Оператор, пользуясь клавиатурой 25 и
цифро-буквенным индикатором 26 вводит
или текстовую информацию в ОЗУ блока 19
управления или входные данные задачи в
0 микроЭВМ. Результаты ввода решения задачи могут быть построчно просмотрены на индикаторе 26, откорректированы и таким образом зарегистрированы на носителе 8 записи. Начало записи строки формируется
5 известным датчиком (не показан). Обычно это микровыключатель, установленный на корпуса прибора, взаимодействующий с кареткой при ее перемещении в левое крайнее положение.
В качестве per истрирующего узла в при0 веденном варианте используют многоигольчатую ударную печатающую головку и красящую ленту. Могут быть использованы термопечатающая головка и термокопирка, термоголовка и термочувствительный носи5 тель записи, электродная головка и электро- чувствительный носитель, струйная регистрирующая головка и чернила и т. д. Так, в качестве печатающго узла может использоваться ударно-пишущая головка с
малыми габаритами и энергопотреблением, на которую оформлена и подана отдельная заявка на изобретение.
Портативный двухкоординатный регистрирующий прибор (ПДРП) не содержит габаритоемких и энергоемких электроприводов, кинематических связей перемещения каретки и траверсы, тяжелых массивных корпусов и т.д., что снижает габариты, энергопотребление и стоимость прибора. Представляется возможность использования легких пластмасс и малогабаритных радиоэлементов. Прибор расширяет его функциональные возможности, может использоваться как с внешним блоком питания так и с автономным питанием в поезде, в самолете, в домашних условиях, в командировке и на работе при печати текстовой информации (письма, статьи и т. д.) и при выводе результатов расчета как с внутренней микроЭ ВМ так и персонального компьютера. Информация, регистрируемая на носителе может содержать графические рисунки с пометками и шкалами. Скорость и качество регистрации информации зависит от регистрирующего узла и навыка оператора. Сигнализация оператора режимов скорости перемещения держателя как правило требуется ему только на первых этапах работы с ПДРП. Со временем у оператора появляется навык работы и правильный выбор скорости перемещения держателя. Предельная минимальная скорость перемещения держателя определяется способностью блока 21 синхронизации линейно заполнить импульсами, поступающими сдатчика положения X 10. Характер регистрируемой информации (пропуски, пробелы, длина слова, начало и конец предложения, внесение поправок в уже записанную информацию и т. д.) оператор контролирует по индикатору.
Емкость ОЗУ в блоке управления может быть не меньше количества знакомест в индикаторе, количество которых может быть определено понятным словосочетанием со сдвигом его по индикатору влево и вправо. Таким количеством знакомест можно считать 25-50 знакомест, Оптимальным количеством знакомест является число знакомест, размещенных в одной полной строке на ширину носителя.
Габариты ПДРП при ширине носителя 210 мм в сложенном состоянии составляют 220v310 35 мм, масса 1-2 кг, энергопотребление 2-5 Вт.
В настоящее время ведутся работы по завершению опытно-конструкторской разработки опытного образца прибора.
0
5
0
Блок 20 контроля и синхронизации функционально определен микросхемой СП1 (сравнение чисел А и В). Если число В определяется стабильной частотой импульсов за единицу времени, то число А - частота импульсов с датчика положения за эту же единицу времени. Равенство или превышение А больше В сигнализирует скорость перемещения держателя.
Блок 21 синхронизации функционально определен микросхемой арифметико-логического устройства (АЛУ). Число В определяется стабильной частотой РСтаб, импульсов за время перемещения держателя между двумя предыдущими рисками на траверсе. Частота импульсов синхронизации FCH между двумя последующими рисками определяется по формуле
Рстаб.
Рги -
15
Схемные решения блоков 20 и 21 известны и используются в цифровой технике. Формула изобретения
питания, датчик положения регистрирующего узла в направлении X, отличающийся тем, что, с целью повышения удобства эксплуатации, он снабжен закрепленным на каретке держателем с возможностью перемещения
регистрирующего узла по взаимно перпендикулярных направлениях блоком контроля и сигнализации и блоком синхронизации, входы которых подключены к датчику положения регистрирующего узла в направлении X, а выход блока синхронизации соединен с вторым входом блока управления, при этом на траверсе выполнены светоотражающие полосы датчика положения регистрирующего узла в направлении X, а
его передающий и принимающий свет элемент установлен на каретке.
которого проходят над планшетном.
блок питания и блок , правления, содержащий микроЭВМ. клавиатуру и цифро-буквенный индикатор, установлены в одном из складывающихся плоских блоков корпуса.
ел ел
S
с:
v
оэ
СО
V
J1
l
«
| Приспособление для выпечки формового хлеба в механических печах с выдвижным подом без смазки форм жировым веществом | 1921 |
|
SU307A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
