со ы
(А Ю О
Изобретение относится к автоматике и вычислительной технике. Оно предназначается в основном для автоматического npefr с(звиения в графической форме результатов вычислений, получаемых в виде числовых таблиц координат электронных цифровых вы- ч ic л и гея ь и ы х м а ш и н.
Цель изобретения -упрощение конструкции двухкоордииэтного графопостроителя.
На фиг. 1 изображен общий виддвухкоор- динатного графопостроителя, вид сверху; на фиг.2 и 3 - соответственно виды А-А и Б-Б.
Графопостроитель содержит плоский планшет для крепления носителя записи, закрепленные на планшете направляющие 2, по которым перемещается каретка3, соединенная с траверсой 4. На траверсе 4 имеются направляющие 5, расположенные перпендикулярно к направляющим 2, по ко-, то рым перемещается каретка 6 с за крепленной на ней регистрирующей головкой 7, сыполненной в виде чертежной головки, имеющей шесть чертежных перьев 8 и приводимой во вращение специальным шаговым электродвигателем 9 вокруг своей оси 10, Регистрирующая головка 7 имеет возможность опускаться или подниматься с помощью электромагнита 11,закрепленного к каретке 6. Каретка 6 вместе с установленными на ней роликами 12 свободно перемещается на направляющих 5, Траверса 4 и каретка 6 приводятся в движение электродвигателем 14, ось 13 которого жестко соединена с кривошипом 15 четырехшарнирного криво- шипно-коромыслового механизма. Конец кривошипа 15 шарнирно соединен с шатуном 16, который также соединен шарнирно с коромыслом 17, где последний имеет жесткую связь с приводным валом 18, на концы которого насажены опорные подшипники 19, расположенные на планшете 1. К приводному валу 18 с двух сторон жестко соединены одни половины 20 и 21 управляемых муфт (20, 24) и (21, 25) соответственно и внутренние кольца шарикоподшипников 22, 23. Каждая из двух управляемых муфт (20, 24) и (21, 25), состоит из полумуфт 20, 24 и 21, 25 соответственно. К внешнему кольцу шарикоподшипников 22, 23 жестко установлены Еторые половины 24 и 25 управляемых муфт (20, 24) и (21, 25) соответственно, шкивы 26, 27, а также тормозы 28, 29, предназначенные для останова приводного вала 18, где корпуса последних имеют жесткую связь с . планшетом 1. Шкивы 26, 27 через тросы 30, 31 соединены со .шкивами 32, 33. Шкив 32 выполнен двухручьевым и расположен перпендикулярно относительно оси шкива 26. Шкив 33 жестко установлен на оси 34, на концы которого также жестко установлены
шкивы 35, через которые проходят тросы 36. Тросы 36 проходят также через шкивы 37, жестко установленные на оси 38. Концы тросов 36 закреплены к узлу крепления 39
траверсы 4. Через шкивы 32, 40 проходит трос41, концы которого прикреплены к узлу крепления 42. Также в двухкоординатном графопбстроителе размещены датчики положения 43, 44, установленные соответственно на траверсе 4 и каретке 6, с линейными измерительными элементами 45, 46, установленными на планшете 1 и на траверсе 4 соответственно. Эти датчики служат для повышения точности записи графиков.
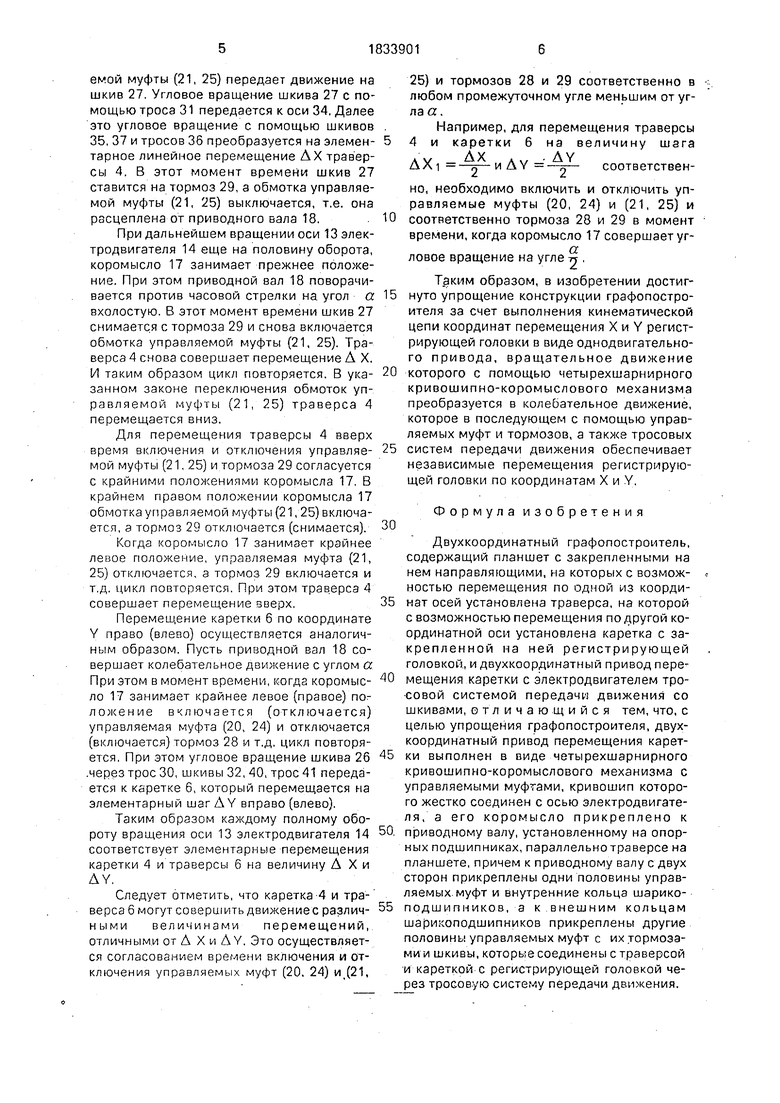
Устройство работает следующим образом. При включении электродвигателя 14 его ось 13 вращается с определенной скоростью. Это вращательное движение электродвигателя 14с помощью четырехшарнирного кривошипно-коромыслового механизма преобразуется в колебательное движение приводного вала 18, так как кривошип 15 четырехшарнирного кривошипно-коромыслевого механизма жестко соединен с осью 13 электродвигателя 14, а коромысло 17 жестко соединено с приводным валом 18.
Каждой половине полного оборота вращения оси 13 электродвигателя 14 соответствует поворот на угол о. коромысла 17 (см. фиг.3)и соответственно приводного вала 18. Одни половины 20 и 21 управляемых муфт (20, 24) и (21, 25) соответственно также совершают колебательное движение с углом
а , так как они также жестко соединены с приводным валом 18. А другие половины 24 и 25 управляемых муфт (20, 24) и (21, 25) соответственно при этом неподвижны, т.е. обмотки управляемых муфт (20, 24) и (21, 25)
обесточены.
Рассмотрим как осуществляется перемещение траверсы 4 с регистрирующей головкой 7 по координате X. В исходном состоянии звенья четырехшарнирного кривошипно-коромыслового механизма расположены в положении, как показано на.фиг.З пунктирными линиями. Пусть ось 13 электродвигателя 14 вращается по часовой стрелке. В этот момент времени обмотка
управляемой муфты (21,25) включена, а тормоз 29 выключен. При этом обе половины 21,25 управляемой муфты (21,25) сцеплены, а приводной вал 18 освобожден от тормоза 29. Когда ось 13 электродвигателя 14 с овершает пол оборота, коромысло 17 поворачивается на угол а , т.е. занимает положение, показанное сплошными линиями на фиг.З. На этот же угол а поворачивается и приводной вал 18, который с помощью управля
емой муфты (21, 25) передает движение на шкив 27. Угловое вращение шкива 27 с помощью троса 31 передается к оси 34. Далее это угловое вращение с помощью шкивов 35, 37 и тросов 36 преобразуется на элемен- тарное линейное перемещение АХ траверсы 4. В этот момент времени шкив 27 ставится на тормоз 29, а обмотка управляемой муфты (21, 25) выключается, т.е. она расцеплена от приводного вала 18.
При дальнейшем вращении оси 13 электродвигателя 14 еще на половину оборота, коромысло 17 занимает прежнее положение. При этом приводной вал 18 поворачивается против часовой стрелки на угол а вхолостую. В этот момент времени шкив 27 снимается с тормоза 29 и снова включается обмотка управляемой муфты (21, 25). Траверса 4 снова совершает перемещение А X. И таким образом цикл повторяется. В указанном законе переключения обмоток управляемой муфты (21, 25) траверса 4 перемещается вниз.
Для перемещения траверсы 4 вверх время включения и отключения управляемой муфты (21. 25) и тормоза 29 согласуется с крайними положениями коромысла 17. В крайнем правом положении коромысла 17 обмотка управляемой муфты (21,25) включается, з тормоз 29 отключается (снимается).
Когда коромысло 17 занимает крайнее левое положение, управляемая муфта (21, 25) отключается, а тормоз 29 включается и т.д. цикл повторяется. При этом траверса 4 совершает перемещение вверх.
Перемещение каретки 6 по координате Y право (влево) осуществляется аналогичным образом. Пусть приводной вал 18 совершает колебательное движение с углом а. При этом в момент времени, когда коромыс- ло 17 занимает крайнее левое (правое) пог ложение включается (отключается) управляемая муфта (20, 24) и отключается (включается) тормоз 28 и т.д. цикл повторяется. При этом угловое вращение шкива 26 .через трос 30, шкивы 32, 40, трос 41 передается к каретке 6, который перемещается на элементарный шаг AY вправо (влево).
Таким образом каждому полному обороту вращения оси 13 электродвигателя 14 соответствует элементарные перемещения каретки 4 и траверсы 6 на величину А X и AY.
Следует отметить, что каретка-4 и траверса 6 могут совершить движение с различ- ными величинами перемещений, отличными от А X и A Y. Это осуществляется согласованием времени включения и отключения управляемых муфт (20, 24) и%(21,
0
0
5
0 5
0.
5
5
0
5
25) и тормозов 28 и 29 соответственно в любом промежуточном угле меньшим от угла а.
Например, для перемещения траверсы 4 и каретки 6 на величину шага
A v AX Av/ . AY AXi -о- и AY
соответственПМ 1 1 п
но, необходимо включить и отключить управляемые муфты (20, 24) и (21, 25) и соответственно тормоза 28 и 29 в момент времени, когда коромысло 17 совершает угловое вращение на угле -п ,
Таким образом, в изобретении достигнуто упрощение конструкции графопостроителя за счет выполнения кинематической цепи координат перемещения X и Y регистрирующей головки в виде однодвигательно- го привода, вращательное движение которого с помощью четырехшарнирного кривошипно-коромыслового механизма преобразуется в колебательное движение, которое в последующем с помощью управляемых муфт и тормозов, а также тросовых систем передачи движения обеспечивает независимые перемещения регистрирующей головки по координатам X и Y.
Формула изобретения
Двухкоординатный графопостроитель, содержащий планшет с закрепленными на нем направляющими, на которых с возможностью перемещения по одной из координат осей установлена траверса, на которой с возможностью перемещения по другой координатной оси установлена каретка с закрепленной на ней регистрирующей головкой., и двухкоординатный привод перемещения каретки с электродвигателем тро- -совой системой передачи движения со шкивами, отличающийся тем, что, с целью упрощения графопостроителя, двухкоординатный привод перемещения каретки выполнен в виде четырехшарнирного кривошипно-коромыслового механизма с управляемыми муфтами, кривошип которого жестко соединен с осью электродвигателя, а его коромысло прикреплено к приводному валу, установленному на опорных подшипниках, параллельно траверсе на планшете, причем к приводному валу с двух сторон прикреплены одни половины управляемых муфт и внутренние кольца шарикоподшипников, а к внешним кольцам шарикоподшипников прикреплены другие половины управляемых муфт с их тормозами и шкивы, которые соединены с траверсой и кареткой с регистрирующей головкой через тросовую систему передачи движения.
/I -A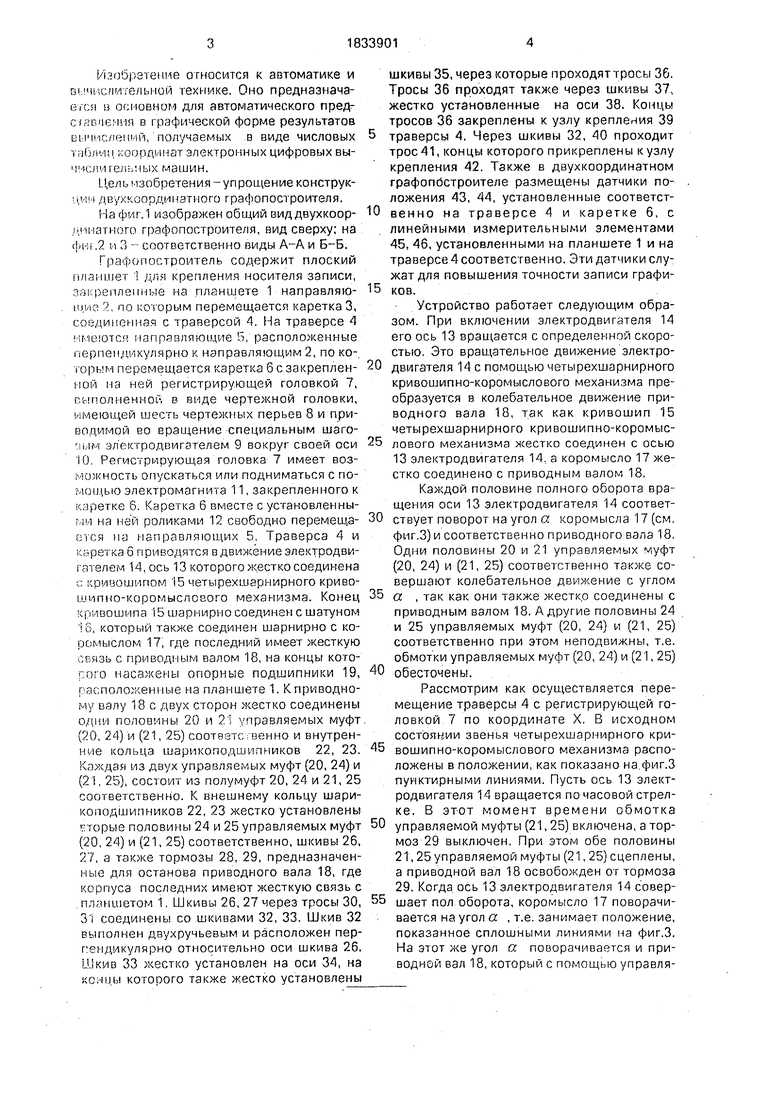
| название | год | авторы | номер документа |
|---|---|---|---|
| Графопостроитель | 1981 |
|
SU1016675A1 |
| Координатный механизм графопостроителя | 1983 |
|
SU1083211A1 |
| Многовыходной преобразователь движения | 1989 |
|
SU1807272A1 |
| Графопостроитель" | 1978 |
|
SU779807A1 |
| Устройство для сортировки цилиндрических изделий | 1985 |
|
SU1482738A1 |
| Устройство контроля технического состояния гасителей колебаний | 1987 |
|
SU1493870A1 |
| Графопостроитель | 1979 |
|
SU877587A1 |
| Устройство ввода-вывода графической информации | 1980 |
|
SU905648A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| Графопостроитель | 1980 |
|
SU838348A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для автоматического представления в графической форме результатов вычислений, получаемых в виде числовых таблиц координат электронных цифровых вычислительных машин. Цель - упрощение конструкции графопостроителя. В двухкоординатном графопостроителе вращательное движение электродвигателя 14 с помощью четырехшарнирного кривошипно-ко- ромыслового механизма преобразуется в колебательное движение коромысла 17, которое с помощью управляемых муфт (20, 24), (21, 25), тормозов 28, 29 и тросовых систем передачи движения преобразуется в два независимых движения по координатам X и Y регистрирующей головки 7.3 ил.
м о
/J T5
Фиг г
Р#е.з
| Двухкоординатное регистрирующее устройство | 1973 |
|
SU488066A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| 0 |
|
SU315034A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гиленко В.Г | |||
| и др | |||
| Автоматические построители графиков ЦВМ | |||
| М., Энергия, 1969, с.16-19. | |||
