ние совершается в два этапа. На первом этапе целевой сигнал виброускорения (эталон), пересчитанный двойным интегрировэ- нием в перемещение, подается при пониженном уровне усиления на вход вибровозбудителя. С выхода датчика виброускорения принимается сигнал обратной связи, после чего определяется комплексный спектр этого сигнала и эталона. Отношение квадрата комплексного спектра эталона к комплексному спектру сигнала обратной связи дает комплексный спектр сигнала нагружения по ускорению для второго этапа, На втором этапе полученный сигнал с помощью обратного преобразования Фурье пересчитывается во временную зависимость сигнала нагружения по ускорению, которая пересчитывается двойным интегрированием в сигнал по перемещению и при номинальном уровне усиления выдается на вибровозбудитель.
Недостатком известного способа является невозможность с его помощью обеспечить высокую точность воспроизведения ударного импульса в реальных условиях, т.е. при значительном уровне случайных помех и нелинейных искажений в трактах нагружения и обратной связи, наличии шумов приборов и погрешностей измерений.
Кроме того, на первом этапе способ предполагает выдачу в тракт нагружения эталонного сигнала, что даже при пониженном уровне усиления не гарантирует защиту испытываемого объекта от превышения допустимого уровня по виброускорению. Для пересчета сигнала по ускорению в сигнал по перемещению способ использует двойное интегрирование, что приводит к большим вычислительным затратам.
Цель изобретения - увеличение точности воспроизведения формы ударного импульса виброускорения в заданной точке испытуемого изделия или оснастки.
Указанная цель достигается тем, что согласно способу управления испытаниями на воздействие ударных нагрузок, использующему спектральное представление сигналов нагружения и обратной связи, управление разбивают на два этапа, причем на первом этапе для определеня характеристик обьекта используют тестирующие сигналы при пониженном уровне усиления, вычисляют с их помощью уточненный сигнал нагружения, на втором этапе полученный сигнал выдают в тракт нагружения при номинальном усилении.
На первом этапе производят итерационную оценку частотной передаточной функции тракта нагружения, для чего используют процедуру экспоненциального
сглаживания с переменным коэффициентом усреднения, а именно вычисляют взвешенную нормированную сумму оценки передаточной функции по предыдущим итерациям
и отношения комплексного спектра сигнала обратной связи для данной итерации к комплексному спектру сигнала нагружения для данной итерации, причем комплексный спектр сигнала нагружения для следующей
0 итерации вычисляют как отношение комплексного спектра эталонного сигнала к оценке передаточной функции, полученной для всех итераций с текущей включительно, после чего по ней с помощью обратного
5 преобразования Фурье вычисляют временную функцию, которую выдают в тракт нагружения, причем процедуру вычисления спектральной плотности сигнала нагружения осуществляют для каждой
0 спектральной компоненты независимо, а коэффициент усреднения оценки передаточной функции берут одинаковым для всех частотных полос разрешения.
Для получения равномерной, точности
5 оценки передаточной функции во всем частотном диапазоне в качестве временной функции сигнала нагружения для итерации выбирают функцию, имеющую равномерный спектр, например одиночный короткий
0 импульс малой амплитуды.
Могут быть использованы различные зависимости коэффициента усреднения от номера итерации.
В простейшем случае коэффициент ус5 реднения выбирают постоянным из диапа- , зона Q...1 и не зависящим от номера итерации, а число итераций определяют как произведение величины, обратной коэффициенту усреднения, и некоторой величины,
0 лежащей в диапазоне 1...10 и выбираемой в зависимости от уровня помех.
При наличии ограничений на точность воспроизведения заданной формы временной зависимости виброускорения ко5 эффициент усреднения для первой итерации берут равным 1 и в дальнейшем изменяют обратно пропорционально номеру итерации, а итерационный процесс первого этапа продолжают до тех пор, пока
0 величина среднеквадратичного относительного уклонения временной зависимости виброускорения с датчика обратной связи от эталонного не станет меньше заданной величины,
5
Предлагаемый способ осуществляют следующим образом.
На первом этапе для каждой итерации и в каждой частотной полосе разрешения вычисляют текущую среднюю по многим
итерациям оценку передаточной функции тракта возбуждения:
К (N-M) - (1-A(N)) K(N) + A(N) S0(N)/SH(N) (1)
где K(N) - оценка передаточной функции по всем итерациям до N-й включительно;
So(N) - комплексный спектр сигнала обратной связи на этапе N-й итерации;
SH(N)- комплексный спектр сигнала на- гружения для N-й итерации;
A(N) - коэффициент усреднения;
N - номер итерации,
Комплексный спектр сигнала нагруже- ния SH(N) для каждой итерации определяют с помощью прямого преобразования Фурье.
Отношение S0(N)/SH(N) представляет собой оценку передаточной функции для N- й итерации.
Комплексный спектр сигнала нагруже- ния для N+1-й итерации определяют из выражения
SH(N+1)S/K(N+1),(2)
где S - компексный спектр целевой функции (эталона); SH(N+1) - комплексный спектр сигнала нагружения для N+1-й итерации,
Из (2) следует, что
SH(N) - S/K(N)(3)
Исключая с помощью (2) и (3) K(N) и К(М-И) из (1) и вводя индекс, задающий номер частотной полосы разрешения, получают итерационную формулу управления для вычисления сигнала нагружения на любой итерации первого этапа, удобную для реализации в устройстве:
SH(N+1,M)
SH(N,M)/(1+A(N) (S0(N,M)/S(M)-1)); (4)
М-1.2L,
где М - номер частотной полосы разрешения;
L- количество разрешаемых частотных полос.
Таким образом, среднюю по многим итерациям оценку передаточной функции в процессе управления явно не вычисляют, хотя в любой момент она может быть получена из выражения (3).
Временную последовательность сигнала нагружения для каждой следующей итерации получают из комплексного спектра SH(N+1)c помощью обратного преобразования Фурье,
После завершения первого этапа сформированный сигнал нагружения выдают в тракт нагружения при номинальном усилении.
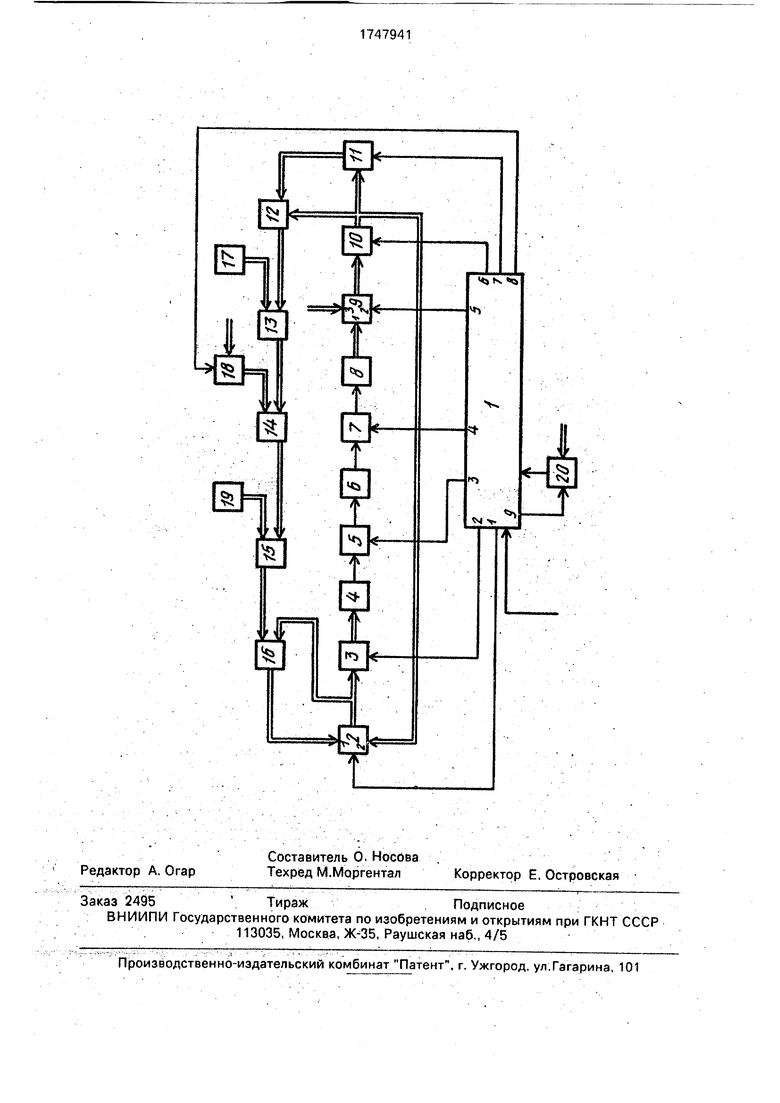
На чертеже изображена структурная схема устройства для осуществления предлагаемого способа.
Устройство для управления испытаниями на воздействие ударных нагрузок содержит блок 1 управления, блок 2 памяти, процессор 3 ОБПФ, цифроаналоговый пре- 5 образователь 4, усилитель 5, вибровозбудитель 6, усилитель 7, аналого-цифровой преобразователь 8. коммутатор 9, процессор 10 БПФ, блок 11 памяти, блок 12 деления, сумматор 13, блок 14 умножения,
0 сумматор 15, блок 16 деления, регистры 17-19 и счетчик 20, причем входами устройства являются первый вход блока 1 управления, информационный вход регистра 18, второй информационный вход комму5 татора 9 и вход занесения счетчика 20, а первый-девятый выходы блока 1 управления подключены соответственно к управляющим входам блока 2 памяти, процессора 3 ОБПФ, усилителя 5, усилителя 7, коммутато0 ра 9, процессора 10 БПФ, блока 11 памяти, регистра 18 и счетчика 20, причем выход переполнения последнего подключен к второму входу блока 1 управления.
Кроме того, выход блока 2 памяти под5 ключей к входу делимого блока 16 деления и к информационному входу процессора 3 БПФ, выход которого подключен к входу цифрового преобразователя 4, выход которого подключен к информационному входу
0 усилителя 5, выход которого подключен к входу вибропреобразователя б, выход которого подключен к входу аналого-цифрового преобразователя 8, выход которого подключен к первому информационному
5 входу коммутатора 9, выход которого подключен к информационному входу процессора 10 БПФ, выход которого подключен к второму информационному входу блока 2 памяти, входу делимого блока 12 деления и
0 к информационному входу блока 11 памяти, выход которого подключен к входу делителя блока 12 деления, выход которого подключен к первому входу сумматора 13, к второму входу которого подключен выход
5 регистра 17, а его выход подключен к первому входу блока 14 умножения, к второму входу которого подключен Выход регистра 18, а его выход подключен к первому входу сумматора 15, к второму входу которого подключен
0 выход регистра 19, а его выход подключен к входу делителя блока 16 деления, выход которого подключен к первому информационному входу блока 2 памяти,
Устройство реализует способ по алго5 ритму, описываемому формулой (4), и работает следующим образом,
Регистры 17 и 19 являются постоянными запоминающими устройствами, причем первый содержит положительную единицу, а второй - отрицательную.
Предварительно по командам от устройства управления в счетчик 20 загружается количество итераций первого этапа, в регистр 18 загружается соответствующее значение постояной усреднения. После этого в процессор БПФ через коммутатор 9 загружается массив кодов временной выборки целевого сигнала (эталона). Завершив преобразование, процессор 10 БПФ выдает полученный массив кодов комплексного спектра эталона, который заносится в блок 11 памяти, где и сохраняется в течение всего первого этапа. Затем через коммутатор 9 в процессор 10 БПФ загружается массив кодов временной выборки сигнала нагружения для первой итерации, спектральная плотность этого сигнала загружается в блок 2 памяти. По команде от устройства управления усилитель 5 переходит в состояние с пониженным коэффициентом усиления, а усилитель 7 - с повышенным, причем если коэффициент усиления первого уменьшается в К раз, то коэффициент усиления второго во столько же раз повышается. Коммутатор 9 переключается в состояние, при котором цифровые коды поступают на выход с первого информационного входа, после чего устройство готово к работе.
По команде оператора устройство начинает выполнять циклическую процедуру первого этапа. Каждый итерационный цикл управления начинается с того, что по команде блока 1 управления массив комплексного спектра сигнала нагружения переписывается из блока 2 памяти в процессор 3 ОБПФ. По завершении преобразований массив сигнала нагружения по одному отсчету выдается на цифроаналоговый преобразователь 4, с выхода которого аналоговый сигнал, ослабленный усилителем 5, поступает на вибровозбудитель 6. Сигнал обратной связи с датчика виброускорения {не показан) усиливается усилителем 7 и преобразуется аналого-цифровым преобразователем 8 в непрерывную последовательность кодов, поступающих через коммутатор 9 на вход процессора 10 БПФ, который принимает массив отсчетов сигнала обратной связи синхронно с выдачей массива сигнала нагружения процессора 3 ОБПФ, причем синхронность обеспечивается управляющими сигналами из блока 1 управления. По завершении ввода процессор 10 ВПФ вычисляет комплексный спектр сигнала обратной связи для текущей итерации. После этого по сигналам от блока 1 управления одновременно и синхронно блоки 2 и 11 памяти и процессор 10 БПФ начинают поштучно выдавать отсчеты соответствующих
комплексных спектров на входы блоков 12 и 16 деления. Блоки 12-16 производят обработку одновременно поступающих троек отсчетов и для каждой такой тройки зычисляет по формуле (4) один отсчет комплексного спектра сигнала нагружения для следующей итерации,после чего этот отсчет записывается в блок 2 памяти на место только что прочитанного. По завершении вычис0 ления всех отсчетов блок 1 управления выдает сигнал, по которому счетчик 20 уменьшает содержащийся в нем код на единицу и, если этот код стал нулем, устанавливает сигнал переполнения. Блок 1
5 управления аннулирует этот сигнал и, если он отсутствует, переходит к следующей итерации. Циклический процесс управления, таким образом, замыкается.
Если в конце очередной итерации блок
0 1 управления обнаруживает сигнал переполнения от счетчика 20, то усилители 5 и 7 переводятся в состояние с номинальным усилением, выполняется еще одна итерация, в процессе которой на вибровозбуди5 тель подается сигнал нагружения номинального уровня, после чего управление заканчивается и устройство переходит в исходное состояние.
Предлагаемый способ по сравнению с
0 известным обеспечивает улучшение точности воспроизведения заданной временной зависимости виброускорения в любой заданной точке испытуемого объекта за счет того, что обеспечивает последовательную
5 многократную коррекцию сигнала нагружения, позволяющую существенно уменьшить влияние помех и погрешностей измерений, а также обеспечивает защиту испытуемого обьекта от превышения заданного уровня
0 нагружения на этапе идентификации. Кроме того, он не требует связанного с большими вычислительными затратами пересчета сигнала нагружения по ускорению в сигнал по перемещению.
5
Формула изобретения 1, Итерационный способ управления испытаниями изделий на ударное воздействие, заключающийся в том, что определяют
0 характеристики тракта нагружения и с их учетом определяют уточненный сигнал нагружения, затем в заданной точке обьекта воспроизводят полученный сигнал при номинальном усилении в тракте нагружения,
5 отличающийся тем, что, с целью повышения точностн воспроизведения заданной формы сигнала в точке контроля, определение характеристики тракта на- гружемия, а именно частотной передаточной, функции, производят итерационно,
причем оценку частотной передаточной функции для (М+1}-й итерации вычисляют в каждой частотной полосе разрешения как взвешенную нормированную сумму отношения комплексного спектра сигнала обратной связи для N-й итерации к комплексному спектру сигнала нагружения для N-й итерации и оценки частотной передаточной функции, вычисленной по N предыдущим итерациям, причем коэффициент усреднения выбирают одинаковым для всех частотных полос разрешения, а уточненный сигнал нагружения для (М+1)-й итерации определяют Фурье-преобразованием отношения комплексного спектра эталонного сигнала к средней оценке частотной передаточной функции тракта нагружения в каждой частотной полосе разрешения.
2.Способ по п. 1,отличающийся тем, что коэффициент усреднения берут постоянным из диапазона 0...1 и независящим от номера итерации, а количество итераций
определяют как произведение величины обратной коэффициенту усреднения, и некоторой величины, лежащей в диапазоне 1...10 и выбираемой произвольно.
3.Способ по п.2, отличающийся тем, что коэффициент усреднения для первой итерации берут равным 1 и в дальнейшем изменяют обратно пропорционально номеру итерации, а итерационный процесс первого этапа продолжается до тех
пор, пока величина среднеквадратичного относительного уклонения временной зависимости виброускорения с датчика обратной связи от эталонного не станет меньше заданной величины.
| название | год | авторы | номер документа |
|---|---|---|---|
| Итерационный способ управления испытаниями изделия на случайную вибрацию и устройство для его осуществления | 1988 |
|
SU1569638A1 |
| Процессор быстрого преобразования Фурье | 1985 |
|
SU1277135A1 |
| СПОСОБ КОМПЬЮТЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКОГО ОБНАРУЖЕНИЯ-ПЕЛЕНГОВАНИЯ СИГНАЛОВ С РАСШИРЕННЫМ СПЕКТРОМ | 2005 |
|
RU2291456C1 |
| Специализированный процессор | 1976 |
|
SU703821A1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СЛОЖНЫХ ШИРОКОПОЛОСНЫХ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ С ФИЛЬТРАЦИЕЙ В МАСШТАБНО-ВРЕМЕННОЙ ОБЛАСТИ НА ОСНОВЕ ДИСКРЕТНОГО ВЕЙВЛЕТ-ПРЕОБРАЗОВАНИЯ | 2010 |
|
RU2439601C1 |
| Процессор быстрого преобразования Фурье | 1983 |
|
SU1119027A1 |
| Устройство для испытаний на случайные вибрации | 1989 |
|
SU1704005A1 |
| Процессор быстрого преобразования Фурье | 1986 |
|
SU1388892A1 |
| СПОСОБ ИЗМЕРЕНИЯ СОБСТВЕННОГО ПОДВОДНОГО ШУМОИЗЛУЧЕНИЯ И ШУМОИЗМЕРИТЕЛЬ | 1989 |
|
SU1840603A1 |