чем валу 12 с возможностью взаимодействия с внутренним зубчатым венцом шестерню 15, причем рабочий вал 12 и его опорное приспособление установлены в корпусе с возможностью вращения вокруг приводного вала 4, при этом обойма 16 кинематически соединена с одним из винтов, а опорное приспособление рабочего вала с другим,
причем опорное приспособление каждого вала выполнено в виде корпусов 30 и размещенных в них опор вала 8, 9, 13, 14, а корпуса опор рабочего вала 12 шарнирно смонтированы на корпусах опор приводного вала посредством тяг 28 и кинематически связаны с соответствующим винтом. 6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод ленточного конвейера | 1990 |
|
SU1789451A1 |
| Привод волочильного барабана | 1982 |
|
SU1072944A1 |
| Привод | 1989 |
|
SU1613400A1 |
| УГЛОВАЯ ЗУБЧАТАЯ МУФТА ДЛЯ ПОДВИЖНЫХ ВАЛОВ | 2009 |
|
RU2418211C1 |
| СТАНОК ДЛЯ ОБДИРКИ ДЛИННОМЕРНЫХ ЗАГОТОВОК | 2016 |
|
RU2686426C1 |
| Роликовый конвейер для продольного перемещения и вращения длинномерных цилиндрических изделий | 1986 |
|
SU1456336A1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| ПРОХОДЧЕСКИЙ ЩИТОВОЙ АГРЕГАТ (ГЕОХОД) | 2009 |
|
RU2418950C1 |
| ИНЕРЦИОННЫЙ СТАРТЕР | 1930 |
|
SU46502A1 |
| БЕССТУПЕНЧАТЫЙ ПРИВОД | 2001 |
|
RU2204750C1 |
Использование: изобретение относится к подъемно-транспортной технике, в частности к винтовым конвейерам, может быть использовано для измельчения и транспорзо , Л а Ј/ птирования металлической стружки, и обеспечивает повышение надежности и эффективности работы винтового конвейера, Сущность изобретения: винтовой конвейер содержит корпус с размещенными в нем двумя винтами с многозаходными спиралями и соединенными с приводом. Винтовой конвейер имеет кинематически связанные между собой приводной 4 и рабочий 12 валы с опорными приспособлениями, смонтированную с возможностью вращения вокруг приводного вала 4 обойму 16с внутренним рабочим венцом и установленную на рабоА-Л а Ј/ Г -zzntfS as гг N1 I СО Сл) 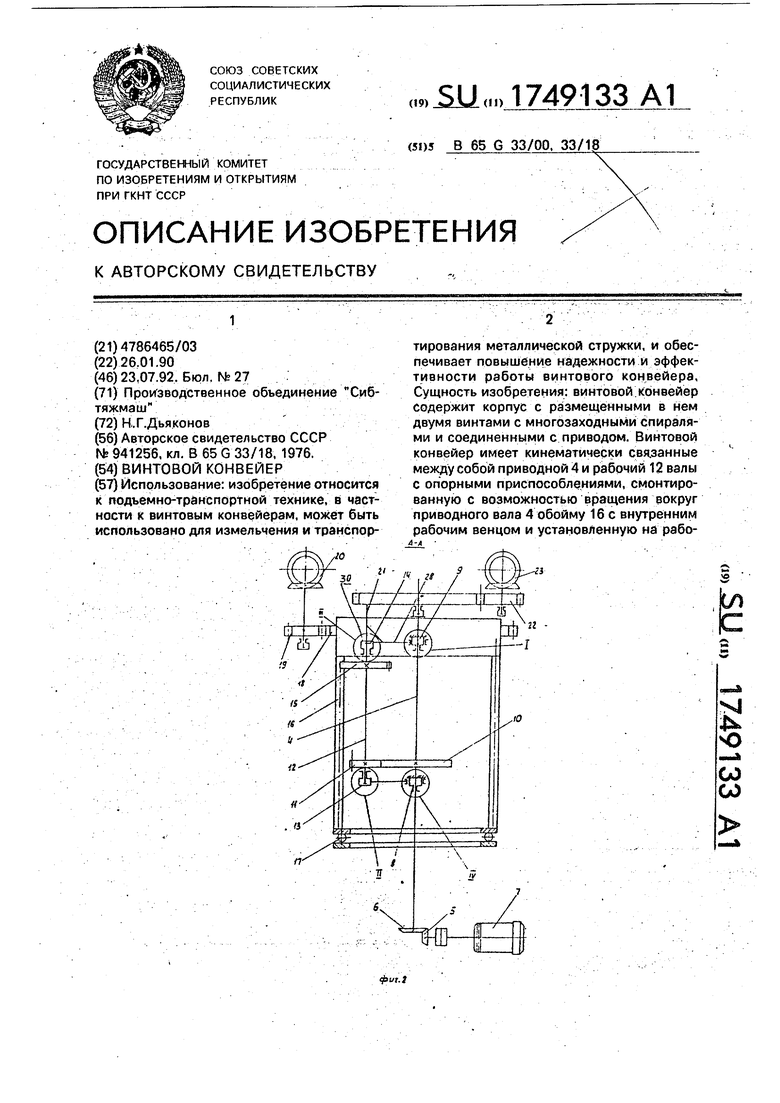
Изобретение относится к подъемно- транспортной технике, в частности к винто- вым конвейерам, и может быть использовано для измельчения и транспортировки металлической стружки.
Известен шнековый конвейер, содержащий корпус и размещенные в нем два шнека, вращающиеся от привода.
Недостатком этого конвейера является постоянство угловых скоростей вращающихся шнеков, что не обеспечивает эффективное дробление металлической стружки при транспортировки ее. При постоянстве взаимных угловых скоростей вращающихся шнеков не удается получить надежную работу конвейера из-за образования Сопротивлений вращению при попадании в конвейер, и особенно в межвитковое пространство, большегабаритных размеров стружки, имеющей высокие удельные сопротивления сколу или изгибу, или посторонних предметов (куски, резцы, прутки и т.д.
Цель изобретения - повышение надежности и эффективности работы путем передачи движения со взаиморегулируемыми скоростными параметрами на оба винта.
Цель достигается тем, что винтовой, конвейер, включающий корпус, размещенные в нем два винта с многозаходными спиралями, соединенные с приводом, снабжен кинематически связанными между собой приводным и рабочим валами с опорными приспособлениями, смонтированной с возможностью вращения вокруг приводного вала зубчатой обоймой с внутренним рабочим венцом и установленной с возможностью вращения вокруг приводного вала обоймой с ёнутренним рабочим венцом и установленной на рабочем валуе возможностью взаимодействия с внутренним зубчатым венцом шестерней, причем рабочий вал и его опорное приспособление установлены
в корпусе с возможностью вращения вокруг приводного вала, при этом обойма кинематически соединена с одним из винтов, а опорное приспособление рабочего вала - с
другим, причем опорное приспособление каждого вала выполнено в виде корпусов и размещенных в них опор вала, а корпуса опор рабочего вала шарнирно смонтированы на корпусах опор приводного вала посредством тяг и кинематически связаны с соответствующим винтом.
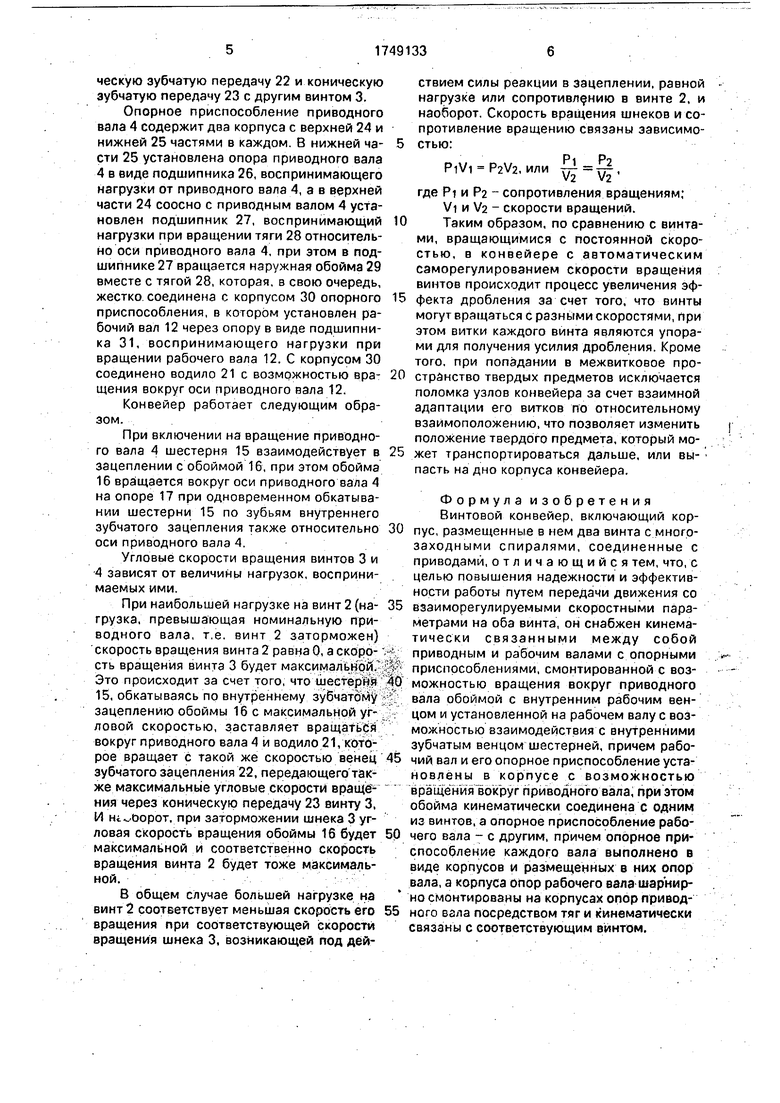
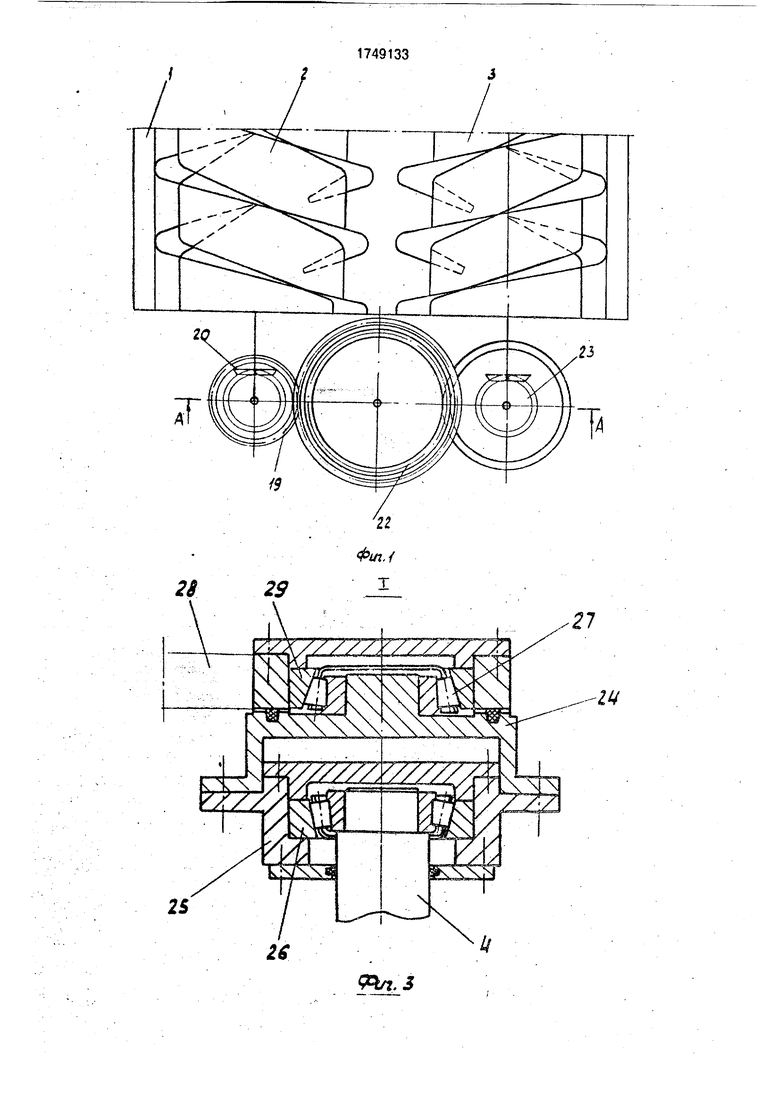
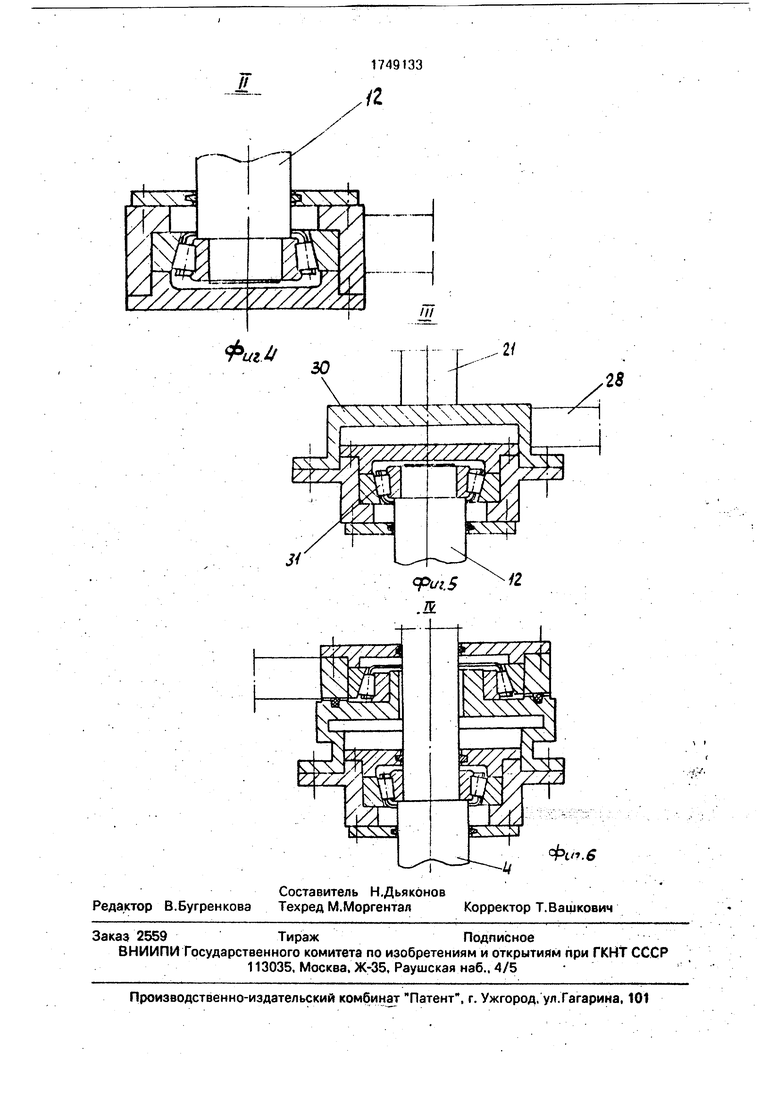
На фиг. 1 изображен винтовой конвейер; на фиг. 2 - разрез А-А на фиг. 1; ча фиг. 3 -узел I на фиг. 2; на фиг. 4-узел II на фиг. 2; на фиг. 5 - узел HI на фиг. 2; на фиг. 6 узел IV на фиг. 2.
Винтовой конвейер содержит корпус 1, внутри которого установлены винты 2 и 3 и привод для передачи вращения винтам 2 и 3.
Привод содержит приводной вал 4, полунающий вращение через конические шестерни 5 и б от электродвигателя 7 и имеющий опорное приспособление с опорами 8 и 9. Приводной вал 4 через кинематическую связь в виде жестко установленной
шестерни 10 и находящейся с ней в зацеплении шестерни 11, установленной на рабочем валу 12, связан с последним. Рабочий вал 12 смонтирован в опорах 13 и 14 его опорного приспособления. На рабочем валу
12 установлена шестерня 15, находящаяся во внутреннем зубчатом зацеплении с обоймой 16, установленной с возможностью вращения вокруг приводного вала 4 на опоре Т7. Обойма-16, имеющая на наружной поверхности зубчатый венец 18, кинематически связана через цилиндрическую зубчатую передачу 19, коническую зубчатую передачу 20 с ;;интом 2 для передачи ему движения, а рабский вал 12 через опору 14
своего опорного приспособления кинематически соединен через водило 21. цилиндрическую зубчатую передачу 22 и коническую зубчатую передачу 23 с другим винтом 3.
Опорное приспособление приводного вала 4 содержит два корпуса с верхней 24 и нижней 25 частями в каждом. В нижней части 25 установлена опора приводного вала 4 в виде подшипника 26, воспринимающего нагрузки от приводного вала 4, а в верхней части 24 соосно с приводным валом 4 установлен подшипник 27, воспринимающий нагрузки при вращении тяги 28 относительно оси приводного вала 4, при этом в подшипнике 27 вращается наружная обойма 29 вместе с тягой 28, которая, в свою очередь, жестко соединена с корпусом 30 опорного приспособления, в котором установлен рабочий вал 12 через опору в виде подшипника 31, воспринимающего нагрузки при вращении рабочего вала 12. С корпусом 30 соединено водило 21 с возможностью вращения вокруг оси приводного вала 12.
Конвейер работает следующим образом.
При включении на вращение приводного вала 4 шестерня 15 взаимодействует в зацеплении с обоймой 16, при этом обойма 16 вращается вокруг оси приводного вала 4 на опоре 17 при одновременном обкатывании шестерни 15 по зубьям внутреннего зубчатого зацепления также относительно оси приводного вала 4.
Угловые скорости вращения винтов 3 и 4 зависят от величины нагрузок, воспринимаемых ими.
При наибольшей нагрузке на винт 2 (нагрузка, превышающая номинальную приводного вала, т.е. винт 2 заторможен) скорость вращения винта 2 равна 0, а скорость вращения винта 3 будет максимальной. Это происходит за счет того, что шестерни 15, обкатываясь по внутреннему зубчатому зацеплению обоймы 16с максимальной угловой скоростью, заставляет вращаться вокруг приводного вала 4 и водило 21, которое вращает с такой же скоростью венец зубчатого зацепления 22, передающего также максимальные угловые скорости вращения через коническую передачу 23 винту 3, И m bopOT, при заторможении шнека 3 угловая скорость вращения обоймы 16 будет максимальной и соответственно скорость вращения винта 2 будет тоже максимальной.
В общем случае большей нагрузке на винт 2 соответствует меньшая скорость его вращения при соответствующей скорости вращения шнека 3, возникающей под действием силы реакции в зацеплении, равной нагрузке или сопротивлению в винте 2, и наоборот. Скорость вращения шнеков и сопротивление вращению связаны эависимо- стью:
P2V2, ИЛИ Јf,
где Pi и Ра - сопротивления вращениям; Vi и V2 - скорости вращений.
Таким образом, по сравнению с винтами, вращающимися с постоянной скоростью, в конвейере с автоматическим саморегулированием скорости вращения винтов происходит процесс увеличения эффекта дробления за счет того, что винты могут вращаться с разными скоростями, при этом витки каждого винта являются упорами для получения усилия дробления. Кроме того, при попадании в межвитковое пространство твердых предметов исключается поломка узлов конвейера за счет взаимной адаптации его витков по относительному взаимоположению, что позволяет изменить положение твердого предмета, который может транспортироваться дальше, или вы- пасть на дно корпуса конвейера.
Формула изобретения Винтовой конвейер, включающий корпус, размещенные в нем два винта с много- заходными спиралями, соединенные с приводами, отличающийся тем, что, с целью повышения надежности и эффективности работы путем передачи движения со
взаиморегулируемыми скоростными параметрами на оба винта, он снабжен кинематически связанными между собой приводным и рабочим валами с опорными
приспособлениями, смонтированной с возможностью вращения вокруг приводного вала обоймой с внутренним рабочим венцом и установленной на рабочем валуе возможностью взаимодействия с внутренними зубчатым венцом шестерней, причем рабочий вал и его опорное приспособление уста- новлены в корпусе с возможностью вращёния вокруг приводного вала, при этом обойма кинематически соединена с одним из винтов, а опорное приспособление рабочего вала - с другим, причем опорное приспособление каждого вала выполнено в виде корпусов и размещенных в них опор вала, а корпуса опор рабочего вала шарнир- но смонтированы на корпусах опор приводнего вала посредством тяг и кинематически связаны с соответствующим винтом.
2В
т
. J
//
Фи-.6
| Шнековый конвейер | 1979 |
|
SU941256A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
