.
Изобретение относится к машиностроению и может быть использовано в приводах металлорежущих станков, а также в качестве привода для управления летательным аппаратом.Известен электромеханический привод, J содержащий электродвигатель, с ротоном -- которого связаны элементы зацепления с Ч перемещаемым механизмом. Ј, -,
Наиболее близким по технический - сущности к предлагаемому являетей электромеханический привод, содержащий электродвигатель и встроенную в него п аруТс винт-гайка.v
К недостаткам указанного электромех,а- нического привода при передачезначитёль- ных усилий поступательным звен ом4 относится наличие прогиба выходного эГ&ё1- на от действия боковой силы, что ограничивает кинематические возможности привода.
Цель изобретения - расширение кинематических возможностей.
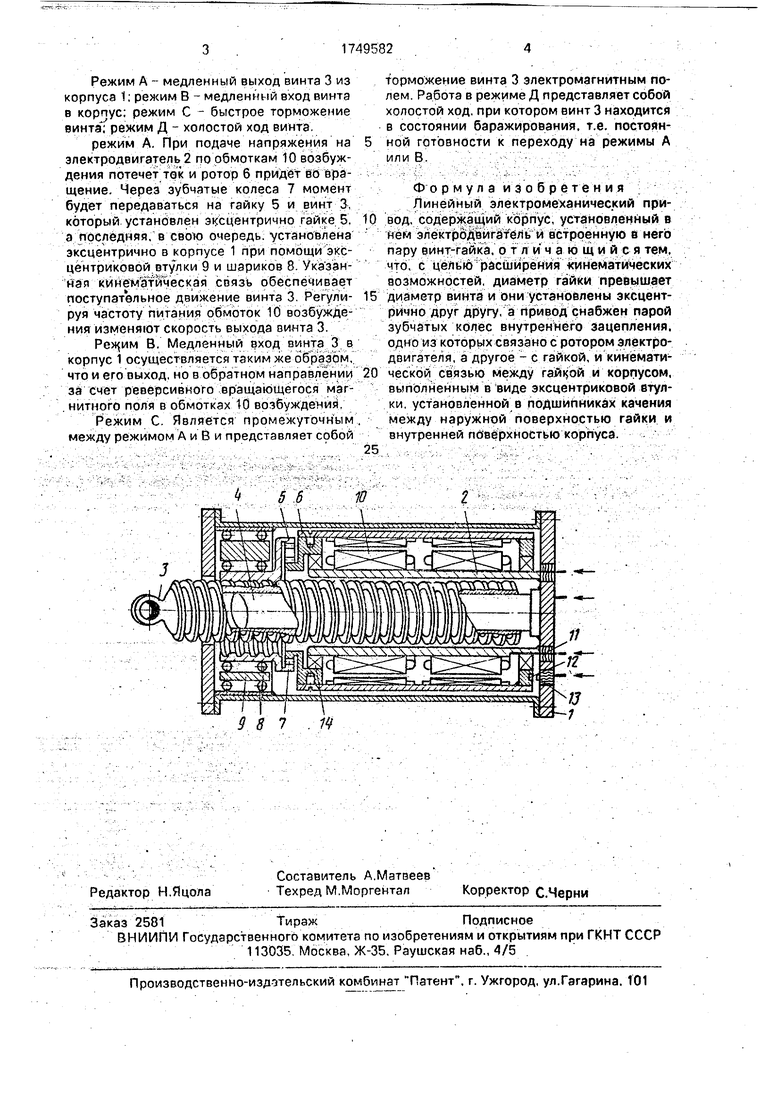
На чертеже изображен привод, общий вид, разрез.
Л
.
, J -- Ч , -,
- Тс
4
Л
Привод содержит корпус 1. установлен- ный в нем электродвигатель 2, в который встроен полый винт 3, установленный на направляющей 4. С винтом взаимодейстг вует гайка 5, диаметр которой превышает диаметр винта, и они у 5Тановлены эксцентрично друг другу. На гайке нарезаны зубья, образующие с зубьями ротора б пару 7 внут- р еннего эксцентрикового зацепления. Между корпусом 1 и наружной поверхностью гайки 5 на шариках 8 установлена1 эксцентриковая втулка 9. Обмотки 10 возбуждения электродвигателя 2 имеют электрические выводы 11, На роторе 6 установлен магнит 12 датчика 13 скорости вращения. Ротор 6 опирается на подшипники 14.
Привод работает следующим образом.
В зависимости рт последовательности включения обмоток 10 возбуждения, представляющих собой два электрически не связанных между собой вентильных электродвигателя 2, можно выделить четыре режима их работы. А, В, С и Д,
сл
VI
&W
ю сл
00
ю
Режим А - медленный выход винта 3 из корпуса 1, режим В - медленный вход винта в корпус; режим С - быстрое торможение винта/режим Д - холостой ход винта
режим А. При подаче напряжения на электродвигатель 2 по обмоткам 10 возбуждения потечет ток и ротор 6 придет во вращение. Через зубчатые колеса 7 момент будет передаваться на гайку 5 и винт 3, который установлен эксцентрично гайке 5, а последняя, в свою очередь, установлена эксцентрично в корпусе 1 при помощи эксцентриковой втулки 9 и шариков 8 Указанная кинематическая связь обеспечивает поступательное движение винта 3 Регулируя частоту питания обмоток 10 возбуждения изменяют скорость выхода винта 3
Режим В. Медленный вход винта 3 в корпус 1 осуществляется таким же образом, что и его оыход, но в обратном направлении за счет реверсивного вращающегося магнитного поля в обмотках 10 возбуждения
Режим С Является промежуточным между режимом А и В и представляет собой
торможение винта 3 электромагнитным полем Работа в режиме Д представляет собой холостой ход, при котором винт 3 находится в состоянии баражирования, т.е. постоян- ной готовности к переходу на режимы А или В
Формула изобретения Линейный электромеханический привод, содержащий корпус, установленный в нем электродвигатель и встроенную в него пару винт-гайка, отличающийся тем, что, с целью расширения кинематических возможностей, диаметр гайки превышает
диаметр винта и они установлены эксцентрично друг другу, а привод снабжен парой зубчатых колес внутреннего зацепления. одно из которых связано с ротором электродвигателя, а другое - с гайкой, и кинематической связью между гайкой и корпусом, выполненным в виде эксцентриковой втулки установленной в подшипниках качения между наружной поверхностью гайки и внутренней поверхностью корпуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МИНИ-ПРИВОД ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2012 |
|
RU2526366C2 |
| ЭЛЕКТРОПРИВОД ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2016 |
|
RU2630966C1 |
| Исполнительный механизм системы управления | 2015 |
|
RU2607490C2 |
| Безредукторный электрический привод запорной арматуры | 2016 |
|
RU2659703C2 |
| Электромеханический привод зажима Барановского В.В. | 1987 |
|
SU1511000A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ СИСТЕМЫ УПРАВЛЕНИЯ | 2015 |
|
RU2601368C1 |
| Электромеханический привод гребного винта судна | 2015 |
|
RU2622175C1 |
| УСТРОЙСТВО ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ САМОЛЕТА | 2010 |
|
RU2442721C1 |
| Винтовой механизм | 1990 |
|
SU1783203A1 |
| Стенд для испытания электроприводов | 2020 |
|
RU2737738C1 |
Изобретение относится к машиностроению и может быть использовано, например, в прецизионных приводах металлообрабатывающих станков. Целью изобретения является расширение кинематических возможностей. Привод позволяет преобразовать высокую частоту вращения ротора 6 электродвигателя в любую управляемую по скорости знакопеременную комбинацию поступательного движения ходового винта 3, при этом обеспечивается его быстрый ход, а также безударное торможение при переходе с режима на режим. 1 ил.
3 8 7
| Линейный шаговый электродвигатель | 1983 |
|
SU1169100A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электродвигатель | 1985 |
|
SU1410215A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| - s | |||
