Фиг г
вдоль продольной оси канала в противофа- зе. В канале установлены носовой и кормовой упругие фиксаторы 26, а на его боковых стенках - продольные направляющие 20 с установленными в них каретками. Каждая
пара пластин выполнена с подкосами 21, шарнирно связанными с каретками, которые установлены с возможностью попеременного взаимодействия с носовым и кормовым упругими фиксаторами. 8 ил.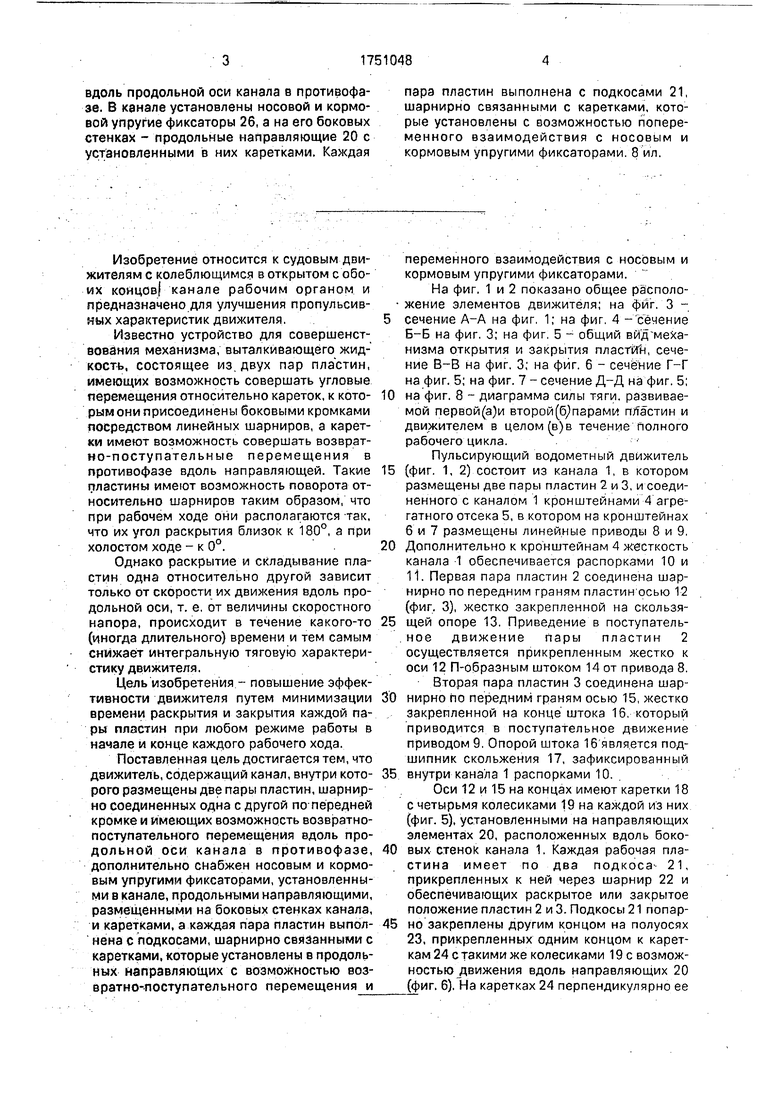
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИЕМА В ПОДВОДНУЮ ЛОДКУ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2328407C1 |
| РЕАКТИВНЫЙ ДВИЖИТЕЛЬ | 1999 |
|
RU2152332C1 |
| КАЧЕХОД И КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2392177C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| СУДНО, ПИТАЕМОЕ И ДВИЖИМОЕ ЭНЕРГИЕЙ КАЧКИ СВОЕГО КОРПУСА | 2006 |
|
RU2365520C2 |
| БРОНЕТРАНСПОРТЕР | 2007 |
|
RU2369825C2 |
| ШАССИ ВОЕННОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2004 |
|
RU2279371C2 |
| АВТОПРИЦЕП - АМФИБИЙНЫЙ ПАРОМ | 2007 |
|
RU2339537C1 |
| АЭРОДИНАМИЧЕСКОЕ СУДНО | 1999 |
|
RU2149109C1 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
Использование: для судовых движителей с колеблющимся в открытом с обоих концов канала рабочим органом. Сущность изобретения: пульсирующий водометный движител ь содержит канал 1, внутри которого размещены две пары пластин, шарнирно соединенных одно с другой по передней кромке, установленные с возможностью возвратно-поступательного перемещения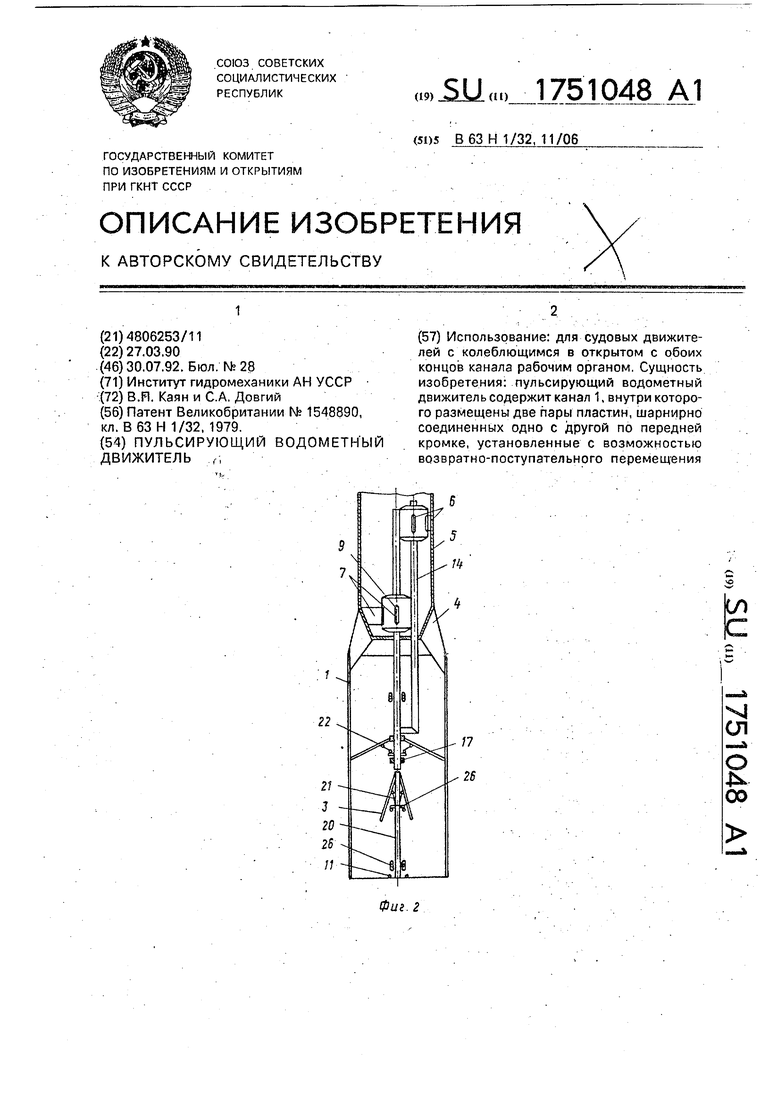
Изобретение относится к судовым движителям с колеблющимся в открытом с обоих концов} канале рабочим органом и предназначено для улучшения пропульсив- ных характеристик движителя.
Известно устройство для совершенствования механизма, выталкивающего жидкость, состоящее из двух пар пластин, имеющих возможность совершать угловые перемещения относительно кареток, к которым они присоединены боковыми кромками посредством линейных шарниров, а каретки имеют возможность совершать возврат- но-поступательные перемещения в противофазе вдоль направляющей. Такие пластины имеют возможность поворота относительно шарниров таким образом, что при рабочем ходе они располагаются так, что их угол раскрытия близок к 180°, а при холостом ходе - к 0°.
Однако раскрытие и складывание пластин одна относительно другой зависит только от скорости их движения вдоль продольной оси, т. е. от величины скоростного напора, происходит в течение какого-то (иногда длительного) времени и тем самым снижает интегральную тяговую характеристику движителя.
Цель изобретения - повышение эффективности движителя путем минимизации времени раскрытия и закрытия каждой пары пластин при любом режиме работы в начале и конце каждого рабочего хода.
Поставленная цель достигается тем, что движитель, содержащий канал, внутри которого размещены две пары пластин, шарнирно соединенных одна с другой по передней кромке и имеющих возможность возвратно- поступательного перемещения вдоль продольной оси канала в противофазе, дополнительно снабжен носовым и кормовым упругими фиксаторами, установленными в канале, продольными направляющими, размещенными на боковых стенках канала, и каретками, а каждая пара пластин выполнена с подкосами, шарнирно связанными с каретками, которые установлены в продольных направляющих с возможностью возвратно-поступательного перемещения и
переменного взаимодействия с носовым и кормовым упругими фиксаторами.
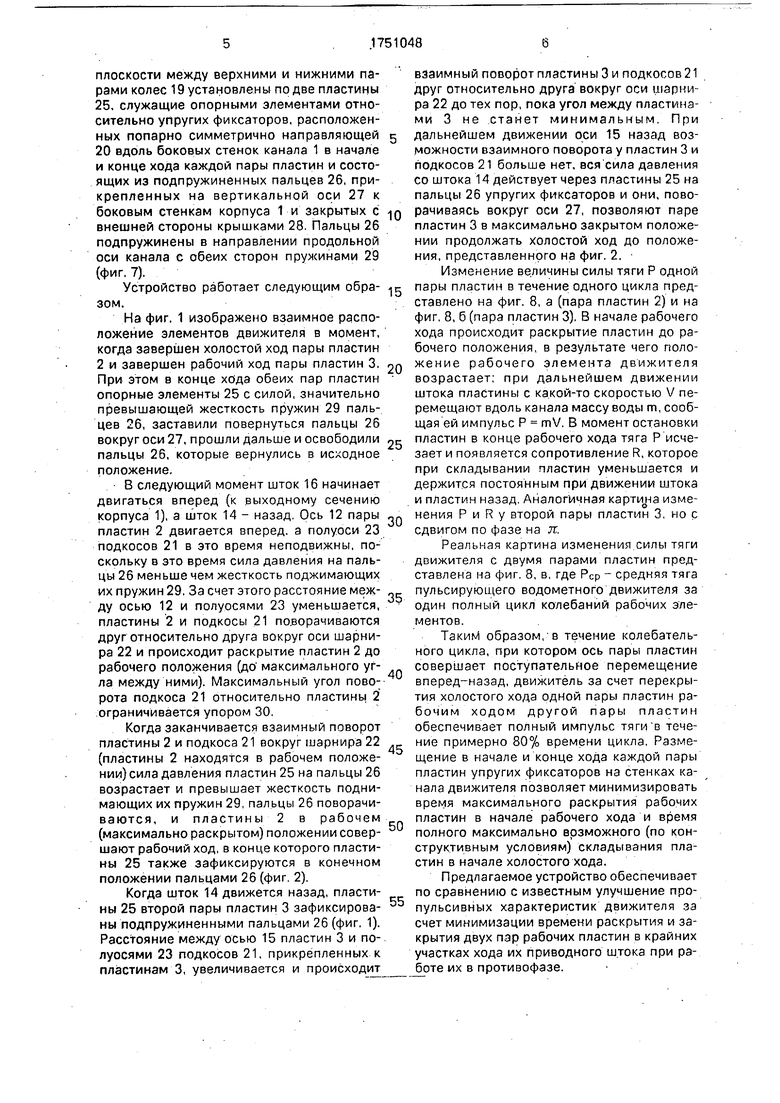
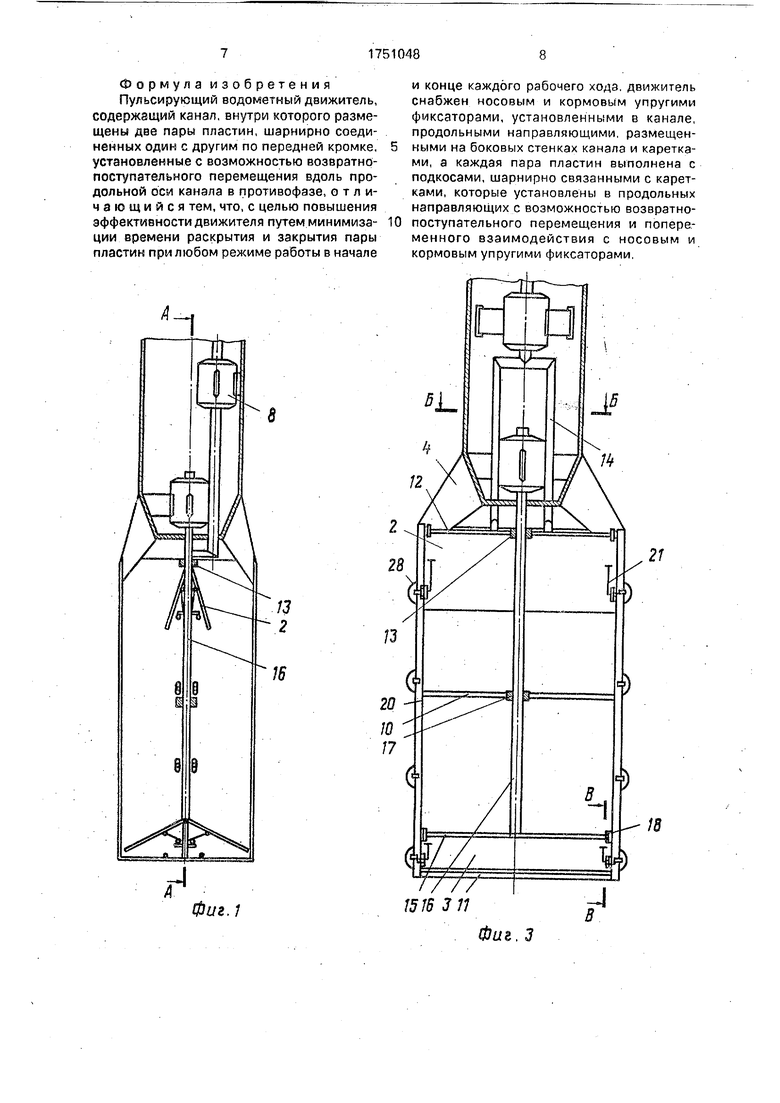
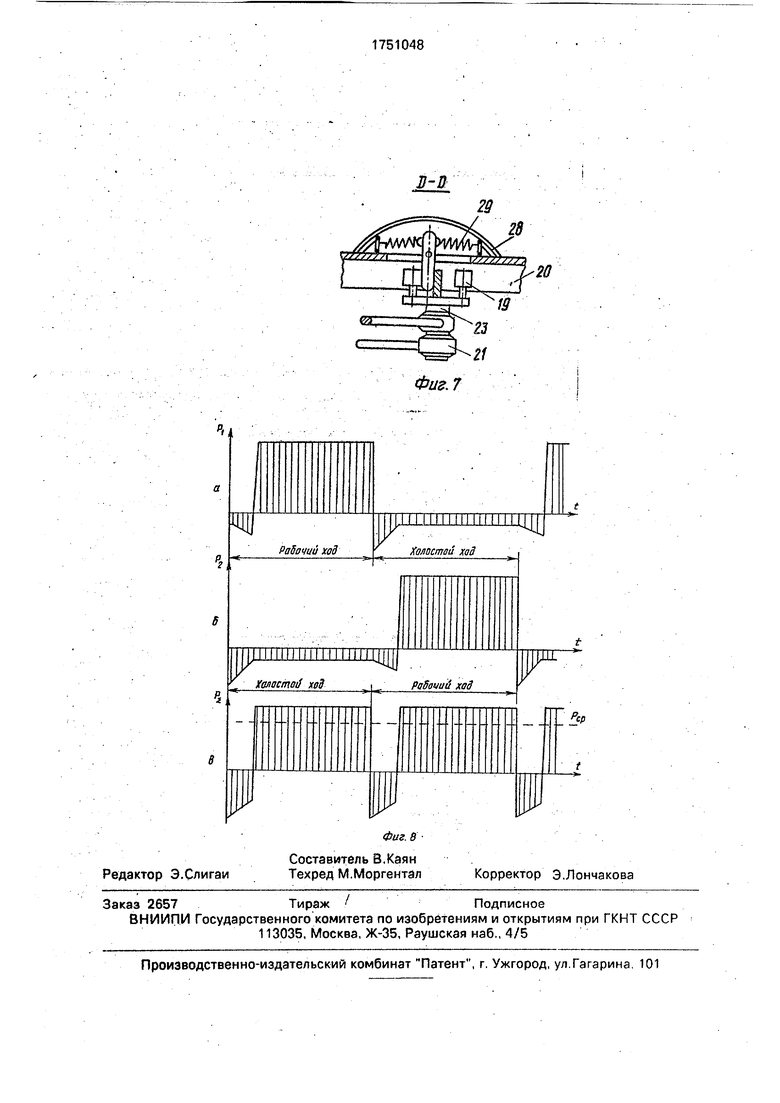
На фиг. 1 и 2 показано общее располо- жение элементов движителя; на фиг. 3 сечение А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 3; на фиг. 5 - общий вид механизма открытия и закрытия пластин, сечение В-В на фиг. 3; на фиг. 6 - сечение Г-Г на фиг. 5; на фиг. 7 - сечение Д-Д на фиг. 5;
на фиг. 8 диаграмма силы тяги, развиваемой первой(а)и второй(б)пзрами пластин и движителем в целом (в)в течение полного рабочего цикла.
Пульсирующий водометный движитель
(фиг. 1, 2) состоит из канала 1, в котором размещены две пары пластин 2 и 3, и соединенного с каналом 1 кронштейнами 4 агрегатного отсека 5, в котором на кронштейнах б и 7 размещены линейные приводы 8 и 9.
Дополнительно к кронштейнам 4 жесткость канала 1 обеспечивается распорками 10 и 11. Первая пара пластин 2 соединена шарнирно по передним граням пластин осью 12 (фиг. 3), жестко закрепленной на скользящей опоре 13. Приведение в поступательное движение пары пластин 2 осуществляется прикрепленным жестко к оси 12 П-образным штоком 14 от привода 8. Вторая пара пластин 3 соединена шарнирно по передним граням осью 15, жестко закрепленной на конце штока 16, который приводится в поступательное движение приводом 9. Опорой штока 16 является подшипник скольжения 17, зафиксированный
внутри канала 1 распорками 10.
Оси 12 и 15 на концах имеют каретки 18 с четырьмя колесиками 19 на каждой из них (фиг. 5), установленными на направляющих элементах 20, расположенных вдоль боковых стенок канала 1. Каждая рабочая пластина имеет по два подкоса- 21, прикрепленных к ней через шарнир 22 и обеспечивающих раскрытое или закрытое положение пластин 2 и 3. Подкосы 21 попарно закреплены другим концом на полуосях 23, прикрепленных одним концом к кареткам 24 с такими же колесиками 19 с возможностью движения вдоль направляющих 20 (фиг. 6). На каретках 24 перпендикулярно ее
плоскости между верхними и нижними парами колес 19 установлены по две пластины 25, служащие опорными элементами относительно упругих фиксаторов, расположенных попарно симметрично направляющей 20 вдоль боковых стенок канала 1 в начале и конце хода каждой пары пластин и состоящих из подпружиненных пальцев 26, прикрепленных на вертикальной оси 27 к боковым стенкам корпуса 1 и закрытых с внешней стороны крышками 28. Пальцы 26 подпружинены в направлении продольной оси канала с обеих сторон пружинами 29 (фиг. 7).
Устройство работает следующим образом.
На фиг. 1 изображено взаимное расположение элементов движителя в момент, когда завершен холостой ход пары пластин 2 и завершен рабочий ход пары пластин 3. При этом в конце хода обеих пар пластин опорные элементы 25 с силой, значительно превышающей жесткость пружин 29 пальцев 26, заставили повернуться пальцы 26 вокруг оси 27, прошли дальше и освободили пальцы 26, которые вернулись в исходное положение.
В следующий момент шток 16 начинает двигаться вперед (к выходному сечению корпуса 1), а шток 14 - назад. Ось 12 пары пластин 2 двигается вперед, а полуоси 23 подкосов 21 в это время неподвижны, поскольку в это время сила давления на пальцы 26 меньше чем жесткость поджимающих их пружин 29. За счет этого расстояние между осью 12 и полуосями 23 уменьшается, пластины 2 и подкосы 21 поворачиваются друг относительно друга вокруг оси шарнира 22 и происходит раскрытие пластин 2 до рабочего положения (до максимального угла между ними). Максимальный угол поворота подкоса 21 относительно пластины 2 ограничивается упором 30.
Когда заканчивается взаимный поворот пластины 2 и подкоса 21 вокруг шарнира 22 (пластины 2 находятся в рабочем положении) сила давления пластин 25 на пальцы 26 возрастает и превышает жесткость поднимающих их пружин 29, пальцы 26 поворачиваются, и пластины 2 в рабочем (максимально раскрытом) положении совершают рабочий ход, в конце которого пластины 25 также зафиксируются в конечном положении пальцами 26 (фиг. 2).
Когда шток 14 движется назад, пластины 25 второй пары пластин 3 зафиксированы подпружиненными пальцами 26 (фиг, 1). Расстояние между осью 15 пластин 3 и полуосями 23 подкосов 21. прикрепленных к пластинам 3, увеличивается и происходит
0
5
0
5
0
5
0
5
0
5
взаимный поворот пластины 3 и подкосов 21 друг относительно друга вокруг оси шарнира 22 до тех пор, пока угол между пластинами 3 не станет минимальным. При дальнейшем движении оси 15 назад возможности взаимного поворота у пластин 3 и подкосов 21 больше нет, вся сила давления со штока 14 действует через пластины 25 на пальцы 26 упругих фиксаторов и они, поворачиваясь вокруг оси 27, позволяют паре пластин 3 в максимально закрытом положении продолжать холостой ход до положения, представленного на фиг. 2.
Изменение величины силы тяги Р одной пары пластин в течение одного цикла представлено на фиг. 8, а (пара пластин 2) и на фиг. 8, б (пара пластин 3). В начале рабочего хода происходит раскрытие пластин до рабочего положения, в результате чего положение рабочего элемента движителя возрастает; при дальнейшем движении штока пластины с какой-то скоростью V перемещают вдоль канала массу воды т, сообщая ей импульс Р mV. В момент остановки пластин в конце рабочего хода тяга Р исчезает и появляется сопротивление R, которое при складывании пластин уменьшается и держится постоянным при движении штока и пластин назад. Аналогичная картина изменения Р и R у второй пары пластин 3, но с сдвигом по фазе на л.
Реальная картина изменения силы тяги движителя с двумя парами пластин представлена на фиг. 8, в, где РСр - средняя тяга пульсирующего водометного движителя за один полный цикл колебаний рабочих элементов.
ТакиМ образом, в течение колебательного цикла, при котором ось пары пластин совершает поступательное перемещение вперед-назад, движитель за счет перекрытия холостого хода одной пары пластин рабочим ходом другой пары пластин обеспечивает полный импульс тяги в течение примерно 80% времени цикла. Размещение в начале и конце хода каждой пары пластин упругих фиксаторов на стенках канала движителя позволяет минимизировать время максимального раскрытия рабочих пластин в начале рабочего хода и время полного максимально возможного (по конструктивным условиям) складывания пластин в начале холостого хода.
Предлагаемое устройство обеспечивает по сравнению с известным улучшение про- пульсивных характеристик движителя за счет минимизации времени раскрытия и закрытия двух пар рабочих пластин в крайних участках хода их приводного штока при работе их в противофазе.
Формула изобретения Пульсирующий водометный движитель, содержащий канал, внутри которого размещены две пары пластин, шарнирно соединенных один с другим по передней кромке, установленные с возможностью возвратно- поступательного перемещения вдоль продольной оси канала в противофазе, отличающийся тем, что, с целью повышения эффективности движителя путем минимизации времени раскрытия и закрытия пары пластин при любом режиме работы в начале
Фиг. 7
0
и конце каждого рабочего хода, движитель снабжен носовым и кормовым упругими фиксаторами, установленными в канале, продольными направляющими, размещенными на боковых стенках канала и каретками, а каждая пара пластин выполнена с подкосами, шарнирно связанными с каретками, которые установлены в продольных направляющих с возможностью возвратно- поступательного перемещения и попеременного взаимодействия с носовым и кормовым упругими фиксаторами,
2,6
/// 1516 ЗП
Фин. 3
53
TI Ч
1
Г з 1
о .& аз
с; «
Щ
Рабочий ход
Холостой ход
23
Фиг. 7
щ
Халостаи ход
Радочии ход
| Патент Великобритании № 1548890, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
