Изобретение относится к области неразрушающего контроля качества изделий и может быть использовано в системах автоматизированного и механизированного кож ропп круглого проката, труб в металлургической, электротехнической, нефтегазовой и других отраслях промышленности.
Известно устройство для манипулирования накладными акустическими блоками в механизме акустического контакта (МАКе), в дальнейшем - манипулятор, содержащее устройство подвода (отвода) накладных аку- CTi еских блоков к поверхности контроли- рузчого изделия, выполненное в виде системы рычагов, связывающей каждый на- гладной акустический блок с гидроцилиндром, закрепленным на планшайбе ротора МАКа 1.
Наиболее близким по технической сущности к предлагаемому является манипулятор акус ического блока, содержащий устройство подвода (отвода) накладных акустических блоков также в виде системы рычагов, по с приводом от пневмоцилиидра, и кроме того - устройство перенастройки на другой типоразмер контролируемого изделия, содержащее кронштейн, к которому шэрнирно закреплен корпус пневмоцилин- дра, асам кронштейн подвижно крепится на планшайбе ротора МАКа с возможностью перемещения по ней и перезакрепления в новом попожении 2.
Данное устройство имеет большие габариты и вес. в связи с наличием рычажной и пневматической систем, передающих усилие акустическому блоку, причем для каждого манипулятора имеется пневмоцилиндр, что не позволяет разместить их в МАКе в количестве более двух,
Целью изобретения является уменьшение габаритов и веса за счет компактности, выполнения элементов конструкции в виде единого агрегата, скомпанованного в одном корпусе (основании).
Поставленная цель достигается тем, что в манипуляторе акустического блока для контроля цилиндрических изделий, содер- жащем основание, установленный с возможностью перемещения вдоль оси манипулятора акустический блок и закрепленный на основании механизм прижима с рычагом, ось которого закреплена на основании перпендикулярно оси манипулятора, рычаг механизма прижима выполнен двуплечим, а сам механизм выполнен в виде установленных коаксиально цилиндрического ползуна, ось симметрии которого
совпадает с осью манипулятора и подпружиненного противовеса, концы которых упираются в соответствующие плечи рычага, манипулятор снабжен плунжером с внутренней резьбой, установленным коаксиально ползуну с возможностью их относительного перемещения, и стаканом, связанным с плунжером посредством резьбы, а с ползуном посредством накидной гайки, акустический блок соосно закреплен
нерабочей поверхностью на плунжере.
Поставленная цель достигается также тем, что манипулятор снабжен регулировочным грузом,установленным в противовесе механизма прижима с возможностью продольного перемещения относительно противовеса и фиксации.
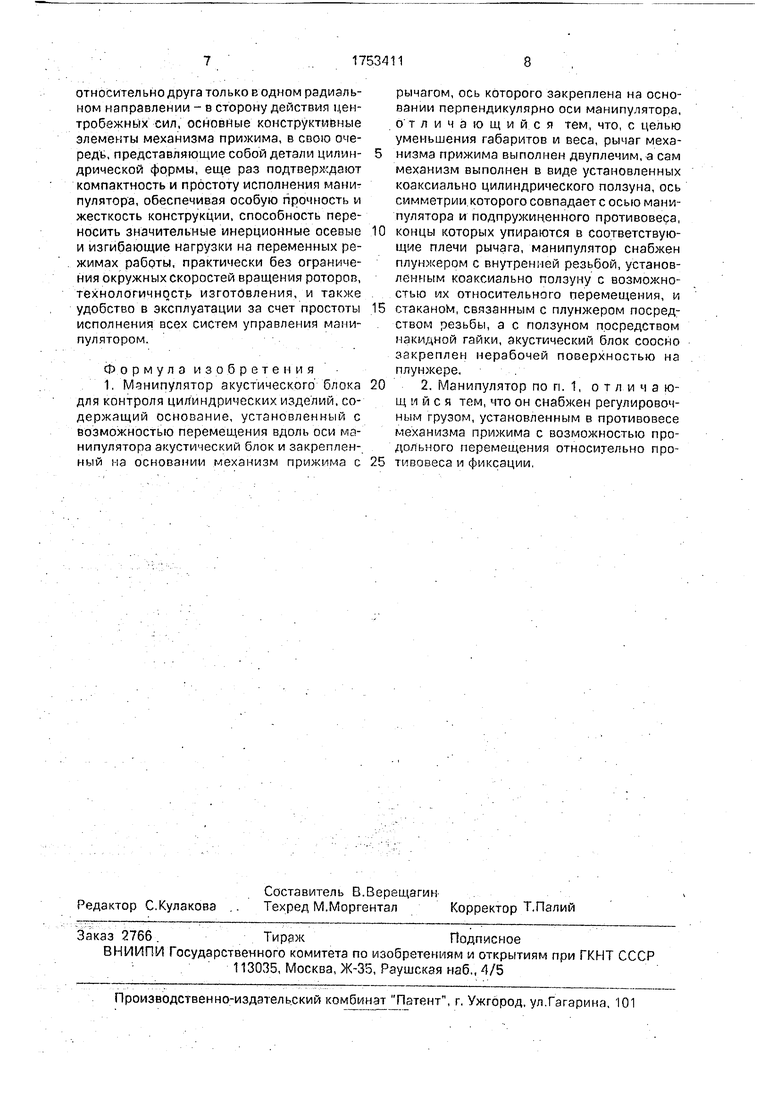
На чертеже представлен манипулятор, разрез.
Манипулятор содержит основание 1 с
двумя упорными кольцевыми поверхностями 2 и 3 и механизм прижима, содержащий два диаметрально расположенных двуплечих рычага 4 на осях 5, неподвижно закрепленную обойму 6 с набором пружин 7,
противовес 8 с гнездами 9 под плечи рыча- гов4ичетырьмя диаметрально расположенными цилиндрическими отверстиями 10 с направляющими продольными прорезями 11 и установленными в отверстиях 10
шпильками 12, закрепляемыми от самопроизвольного проворачивания гайками 13 и посаженными на резьбе шпилек 12 регулирующими грузами 14 с направляющими штифтами 15, а также ползун 16 с гнездами
17 под противоположные плечи рычагов 4 и шпоночным пазом 18 под шпонку 19, неподвижно закрепленную на плунжере 20 с
акустическим блоком 21, подвижно соедипенном резьбой 22 со стаканом 23, снабженным опорным кольцевым буртом 24 для соединения с ползуном 16 с помощью накидной гайки 25. Резиновое уплотнительное кольцо 26 и сильфом 27 предохраняют подвижные соединения поверхностей конструктивных элементов механизма прижима манипулятора от попадания контактной жидкости (воды) из полости ротора 28 МАКа.
Манипулятор работает следующим образом.
Изображенное на чертеже взаиморасположение конструктивных элементов механизма манипулятора соответствует их равновесному состоянию, когда ротор 28 МАКа с радиально установленными на нем манипуляторами либо неподвижен, либо вращается со скоростью, соответствующей рабочему режиму контроля При этом акустический блок 21 находится на установленном приближении от поверхности контролируемого изделия 29.
В положении покоя ротора 29 суммарное усилие пружин 7 передается противовесу 8 и через гнезда 9 -- соответствующим плечам рычагов 4, разворачивая последние в осях 5 в положение, при котором рычаги 4 своими противоположными плечами воздействуют через гнезда 17 на ползун 16, прижимая его к упорной кольцевой поверхности 2 основания 1.
При вращении МАКа (направление вращения условно показано стрелками на чертеже) со скоростью, соответствующей рабочему режиму контроля, возникающие центробежные силы, действующие на элементы конструкции механизма прижима МАКа, не могут нарушить их равновесного взаиморасположения - акустический блок 21 остается ь неизменном приближении от поверхности контролируемого изделия 29.
Для отвода акустического блока 21 от поверхности контролируемого изделия 29 необходимо повысить на определенную величину скорость вращения МАКа, при которой центробежная сипа, действующая на плунжер 20 с акустическим блоком 21, стаканом 23, накидной гайкой 25 и ползуном 16 преодолевает суммарное усилие пружин 7, сложенное с центробежной силой, действующей на противовес 8 с регулирующими грузами 14,
При этом ползун 16 отходит от упорной кольцевой поверхности 2, разворачивает рычаги 4 и через гнезда 9 передает усилие противовесу 8, заставляя его перемещаться, скользя по наружной поверхности обоймы 6, и сжимать пружины 7.
Перемещение противовеса 8 будет продолжаться до упора его в упорную кольцевую поверхность 3 основания 1, регламентируя конструктивно предусмотренную величину отвода акустического блока 21 от поверхности контролируемого изделия 29,
Приведение к одновременному отводу акустических блоков 21 от поверхности кон0 тролируемого изделия 29 всех установленных в роторе 28 МАКа манипуляторов производится регулированием величины центробежной силы, возбуждаемой противовесом 8 при вращающемся роторе, путем
5 изменения местоположения центра масс противовеса 8.
Это достигается поворотом за хвостовики шпилек 12 по часовой или против часовой стрелки. При этом регулирующие грузы 14
0 со скользящими в направляющих прорезях 11 штифтами 15 получают возможность перемещаться, занимая определенное положение по глубине в отверстиях 10 (по высоте противовеса 8), изменяя таким образом ме5 стоположение общего центра масс противовеса.
Новое положение регулирующих грузов 14 фиксируется затяжкой гаек 13.
Для перенастройки акустического блока
0 на другой типоразмер контролируемого изделия необходимо слегка освободить накидную гайку 25, прижимающую кольцевой бурт 24 стакана 23 к торцовой поверхности ползуна 16, и вращать стакан 23 по часовой
5 или против часовой стрелки. При этом плунжер 20 с акустическим блоком 21, находясь в резьбовом соединении со стаканом 23, при наличии шпонки 19, фиксирующей его с помощью паза 18 в ползуне 16 от прово0 рачивания, получает возможность перемещаться относительно неподвижного ползуна 16(основания 1)в радиальном направлении в сторону контролируемого изделия 29 или от него. Новое положение
5 плунжера 20 фиксируется затяжкой накидной гайки 25.
Использование предложенного манипулятора акустического блока, отличающегося компактностью конструкции,
0 представляющей единый агрегат, скомпа- нованный на одном основании, позволяет разместить в одной плоскости поперечного сечения ротора МАКа при относительно небольших размерах самого ротора, значи5 тельное количество манипуляторов (на чертеже показано, в частности, как могут быть размещены 6 манипуляторов).
Смонтированные на основании манипулятора взаимосвязанные между собой с возможностью свободного перемещения друг
относительно друга только в одном радиальном направлении - в сторону действия центробежных сил, основные конструктивные элементы механизма прижима, в свою очередь, представляющие собой детали цилиндрической формы, еще раз подтверждают компактность и простоту исполнения манипулятора, обеспечивая особую прочность и жесткость конструкции, способность переносить значительные инерционные осенью и изгибающие нагрузки на переменных режимах работы, практически без ограничения окружных скоростей вращения ротороп, технологичность изготовления, и также удобство в эксплуатации за счет простоты исполнения всех систем управления манипулятором.
Формула изобретения 1, Манипулятор акустического блока для контроля цилиндрических изделий, содержащий основание, установленный с возможностью перемещения вдоль оси манипулятора акустический блок и закрепленный на основании механизм прижима с
рычагом, ось которого закреплена на основании перпендикулярно оси манипулятора, отличающийся тем, что, с целью уменьшения габаритов и веса, рычаг механизма прижима выполнен двуплечим, а сам механизм выполнен в виде установленных коаксиально цилиндрического ползуна, ось симметрии которого совпадает с осью манипулятора и подпружиненного противовеса,
концы которых упираются в соответствующие плечи рычага, манипулятор снабжен плунжером с внутренней резьбой, установленным коаксиально ползуну с возможностью их относительного перемещения, и
стаканом, связанным с плунжером посредством резьбы, а с ползуном посредством накидной гайки, акустический блок соосно закреплен нерабочей поверхностью на плунжере.
2. Манипулятор по п. 1, отличающийся тем, что он снабжен регулировочным грузом, установленным в противовесе механизма прижима с возможностью продольного перемещения относительно противовеса и фиксации

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля веса | 1985 |
|
SU1282923A1 |
| Устройство для внутритрубной роботизированной механической очистки поверхности трубопроводов | 2024 |
|
RU2837919C1 |
| САМОДЕЙСТВУЮЩЕЕ РЕГУЛЯТОРНОЕ УСТРОЙСТВО ДЛЯ НАСОСОВ, ПРИВОДИМЫХ В ДЕЙСТВИЕ ВЕТРЯКОМ | 1933 |
|
SU38504A1 |
| Универсальный самоходный хлопкоуборочный комбайн | 1991 |
|
SU1819527A1 |
| Установка "Стресс" для определения термомеханических свойств керамических материалов при изгибе сосредоточенной силой | 1983 |
|
SU1180746A1 |
| Изгибающее устройство стенда для испытаний строительных изделий | 1980 |
|
SU945709A2 |
| Линия для динамической балансировки роторов электродвигателей | 1987 |
|
SU1490521A1 |
| Расточный патрон | 1973 |
|
SU516470A1 |
| Устройство для натяжения гибкого элемента передачи | 1988 |
|
SU1714254A1 |
| Прибор для двухпрофильного контроля цилиндрических зубчатых колес | 1990 |
|
SU1712770A1 |
Изобретение относится к области неразрушающего контроля качества изделий и может быть использовано в системах автоматизированного и механизированного контроля круглого проката, труб в металлур-0 гической, электротехнической, нефтегазовой и других отраслях промышленности. Целью изобретения является уменьшение габаритов и веса устройства. В манипуляторе акустического блока для контроля цилиндрических изделий, содержащем акустический блок 21, основание 1, шарнирно соединенные два рычага 4,5, смонтированные на горизонтальных осях основания, рычаги выполнены двуплечими и закреплены на диаметрально расположенных горизонтальных осях, одним плечом рычаги шар
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Установка Кодры | |||
| - Дефектоскопия, , 1977, с | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Техническое описание и инструкция по эксплуатации | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
