ИзоОретение относится к балансировочной технике и может быть ис-; пользовано для балансировки роторов электродвигателей, имеющих на торцах кольцевой паз, запрессовкой корректирующих масс,
Целью изобретения является повышение производительности путем формирования заданной корректирующей мае- сы в схвате манипулятора.
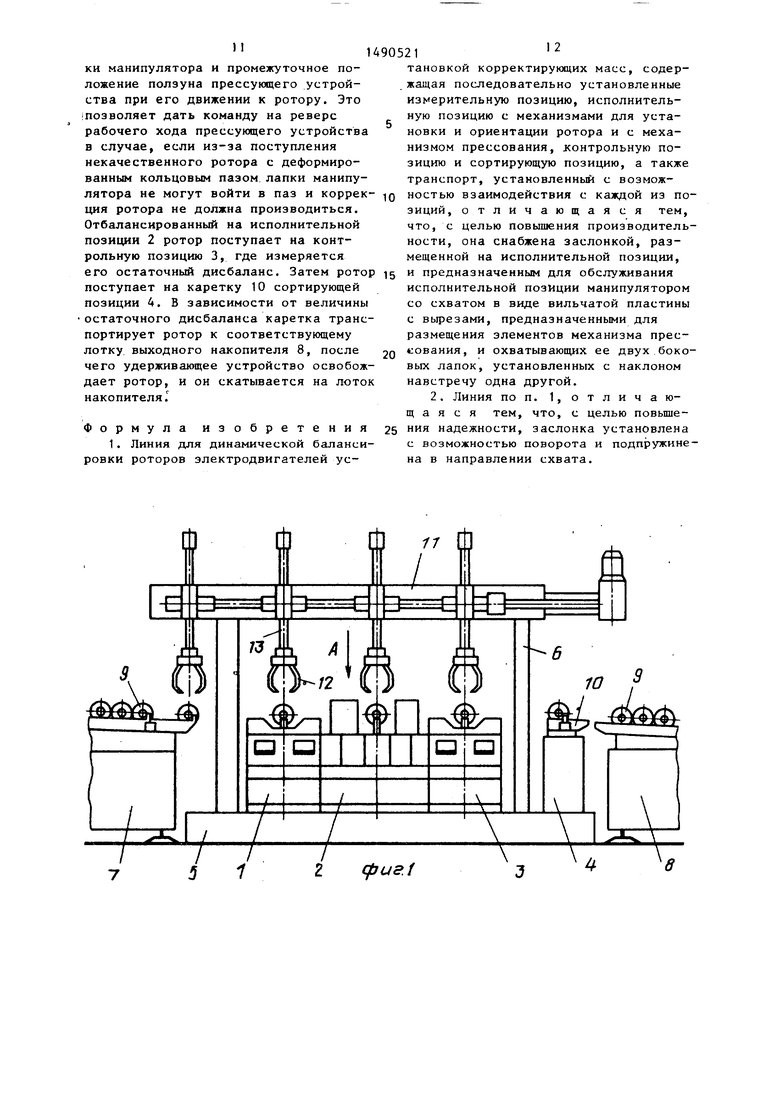
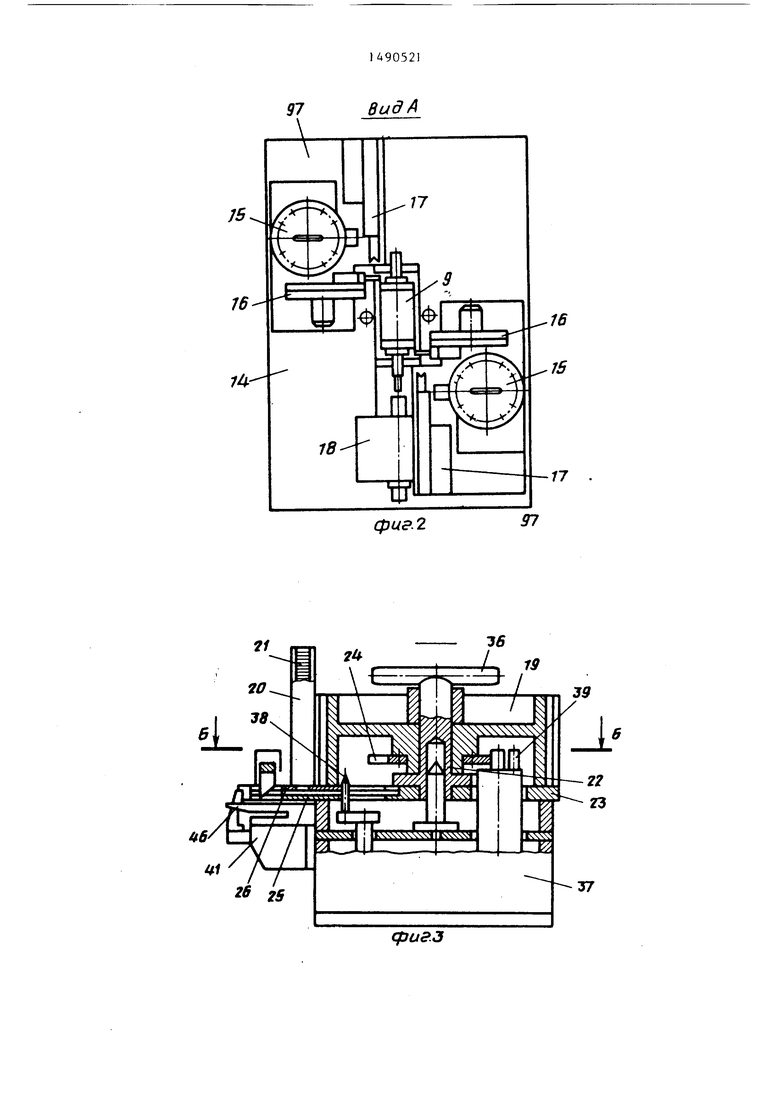
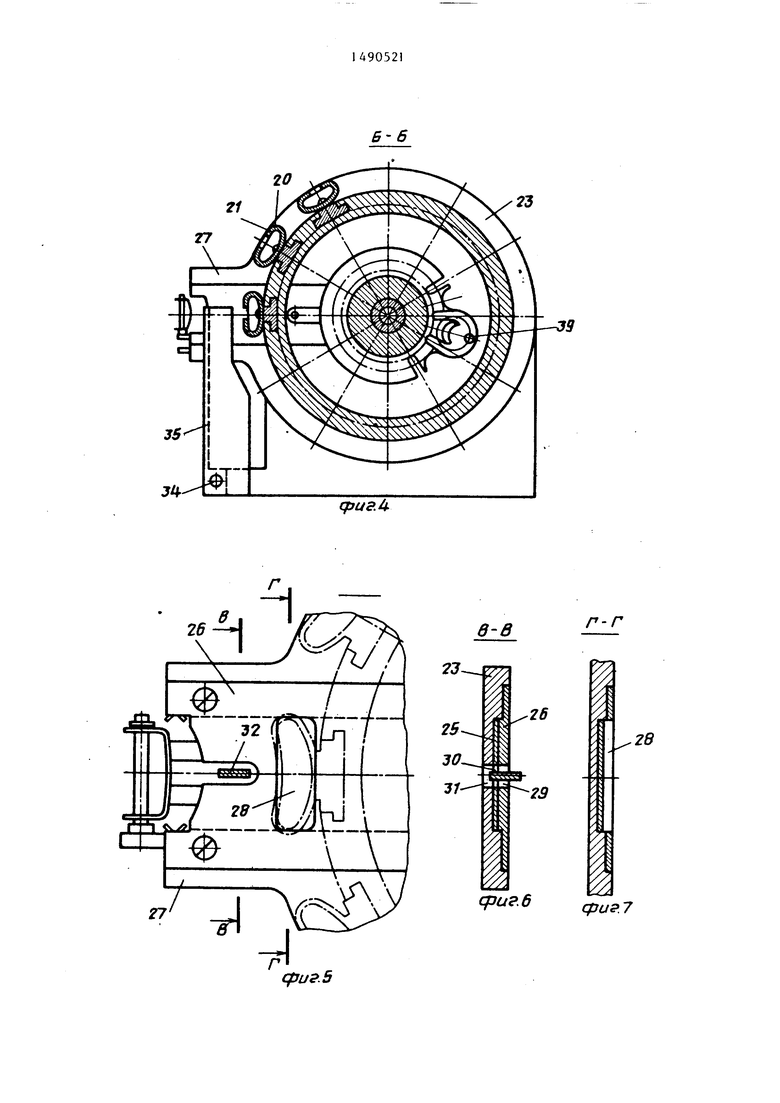
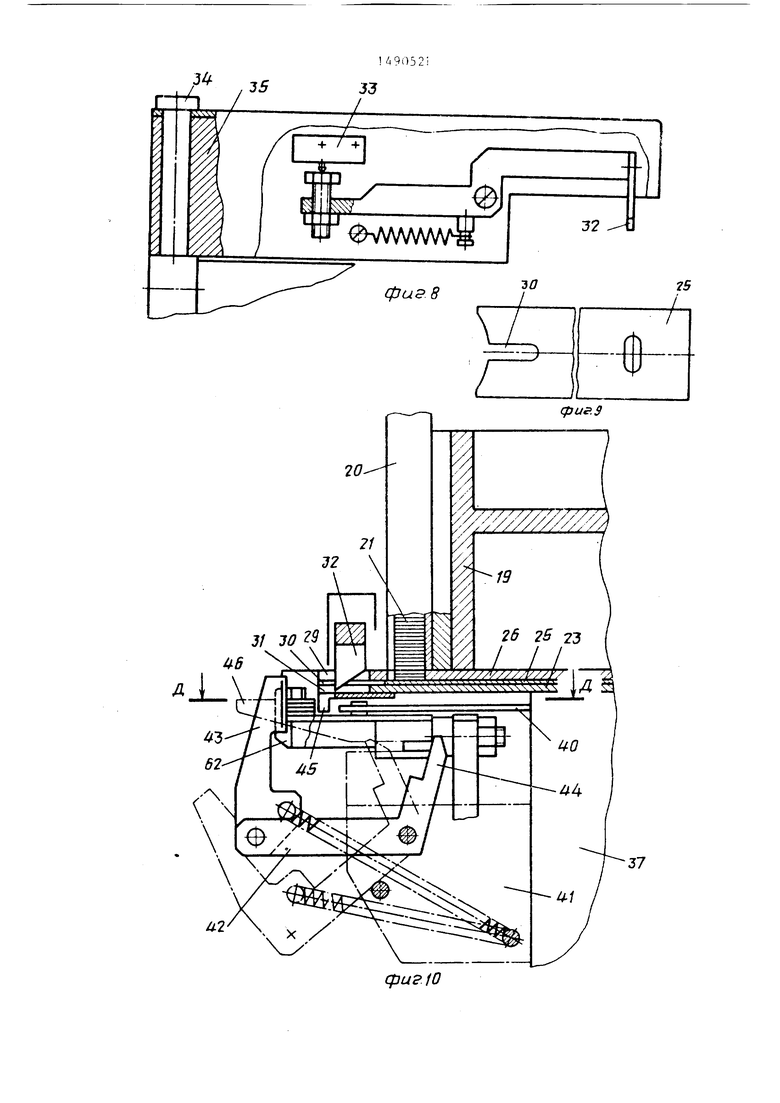
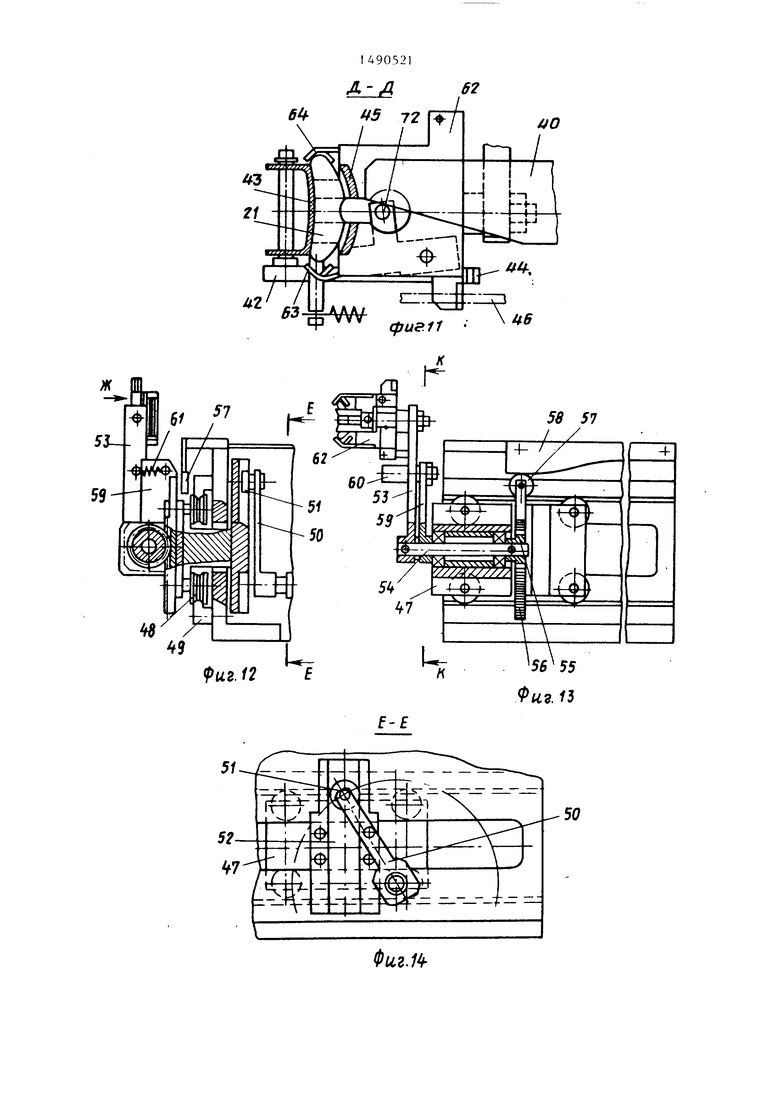
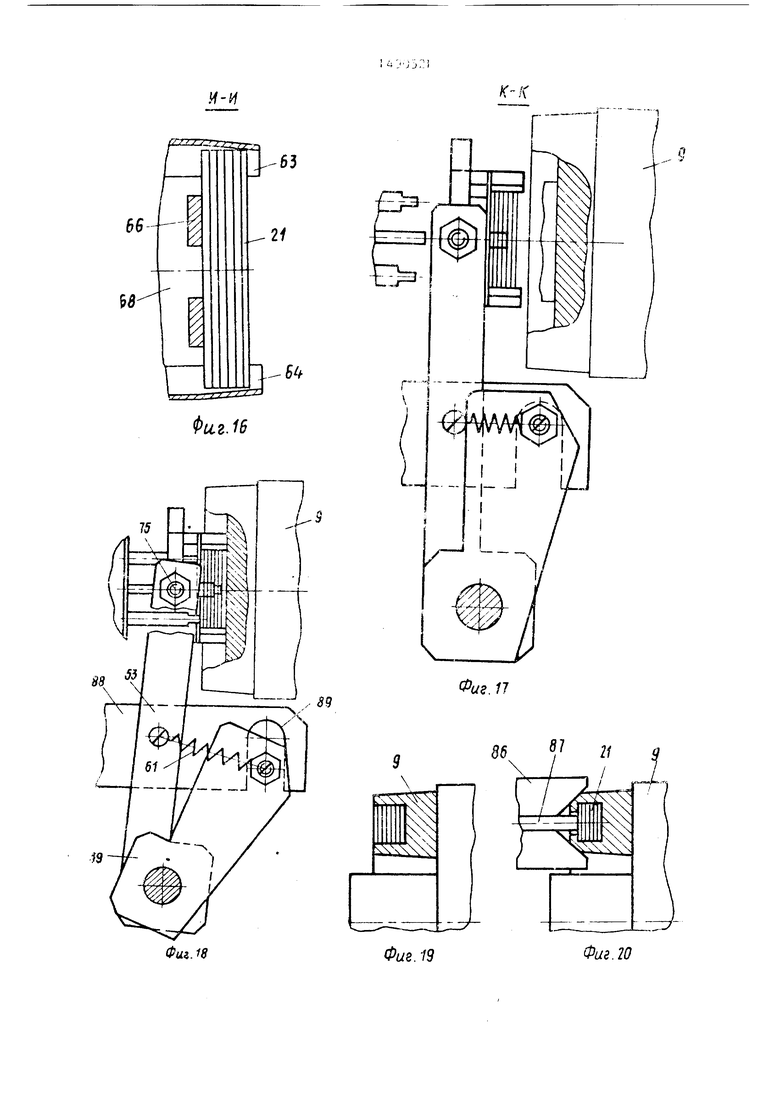
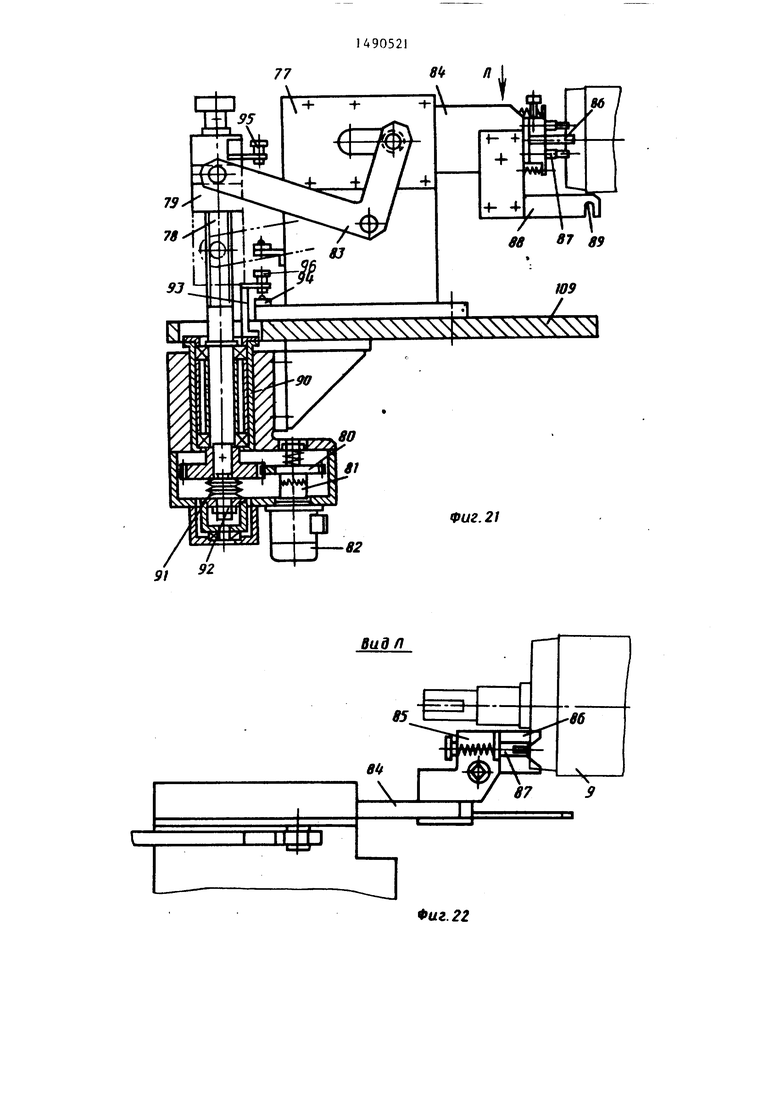
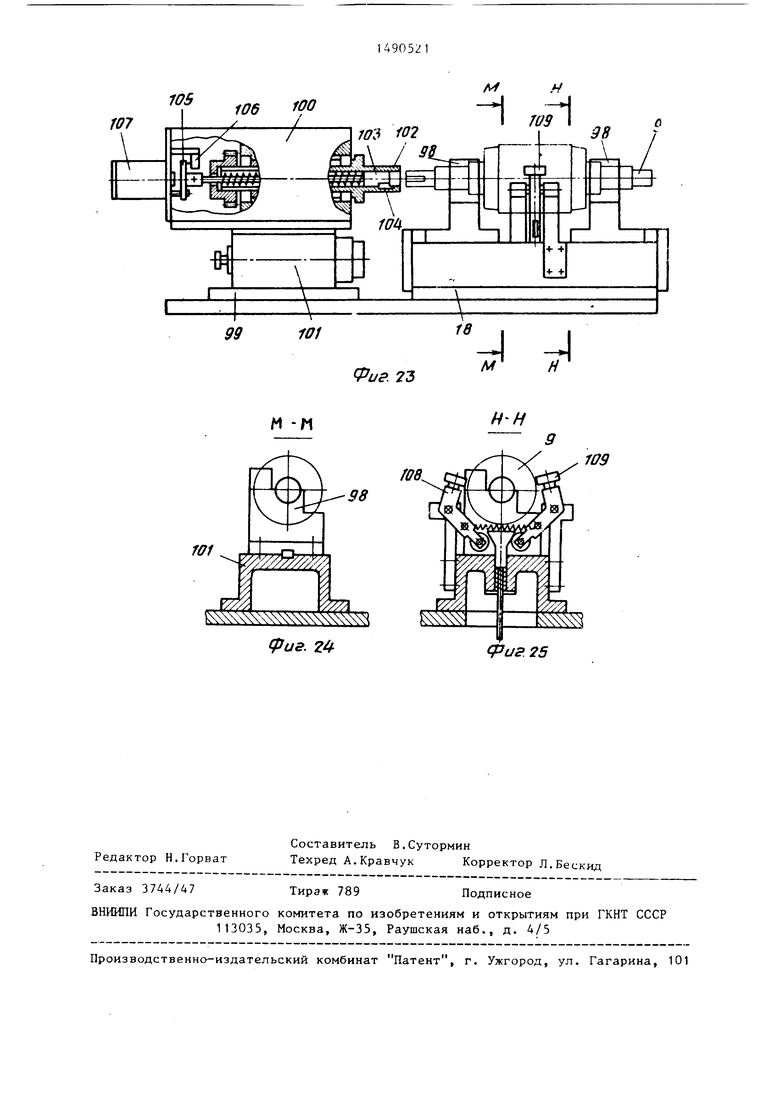
На фиг. 1 изображена линия, обший Бид на фиг. 2 - вид А на фиг. 1 на фиг. 3 - магазин, сечение; на фиг.4 разрез Б-Б на фиг. 3; на фиг. 5 - узел выдачи корректирующих масс; на фиг. 6 - разрез В-В на фиг. 5; на фиг. 7 - разрез Г-Г на фиг. 5} на фиг. 8 - механизм счета корректирующих масс: на фиг. 9 - толкатель ма- газина на фиг. 10 - зона загрузки схвата; на фиг. 11 - разрез Д-Д на фиг. 10; на фиг. 12 - манипулятор, вид сбоку; на фиг. 13 - манипулятор, вид спереди на фиг. 14 - разрез Е-Е на фиг. 12; на фиг. 15 - вид Ж на фиг. 12; на фиг. 16 - разрез И-И на фиг. 15; на фиг. 17 - разрез К-К на фиг. 13; на фиг. 18 - установка корректирующих масс в паз ротора; на фиг. 19 - паз ротораj на фиг. 20 - момент запрессовкиJ на фиг. 21 - . механизм прессования, на фиг. 22 - вид Л на фиг. 21; на фиг.23 - механизм ориентации; на фиг. 24 - разрез М-М на фиг. 23; на фиг. 25 разрез Н-Н на фиг. 23. 1
Линия включает в себя измерительную позицию 1, исполнительную позицию 2, контрольную юзицию 3 и сор- тирующую позицию 4, последовательно установленные на основании 5. Транспорт 6 установлен с возможностью взаимодействия с каждой из позиций. К линии примыкают входной и выходной накопители 7 и 8 для поступивших на балансировку и отбалансированных роторов 9. Выходной накопитель содержи ряд параллельных лотков, предназначенных для роторов,, отбалансированны по различным классам точности. Электрошкаф (не показан) содержит систему управления линии. Измерительная и контрольная позиции аналогичны по конструкции, каждая представляет со- бой балансировочный-станок с ременным приводом балансируемого ротора, предназначенный для измерения параметров динамического дисбаланса ро
j
Ю
5 0 5 0
0
5
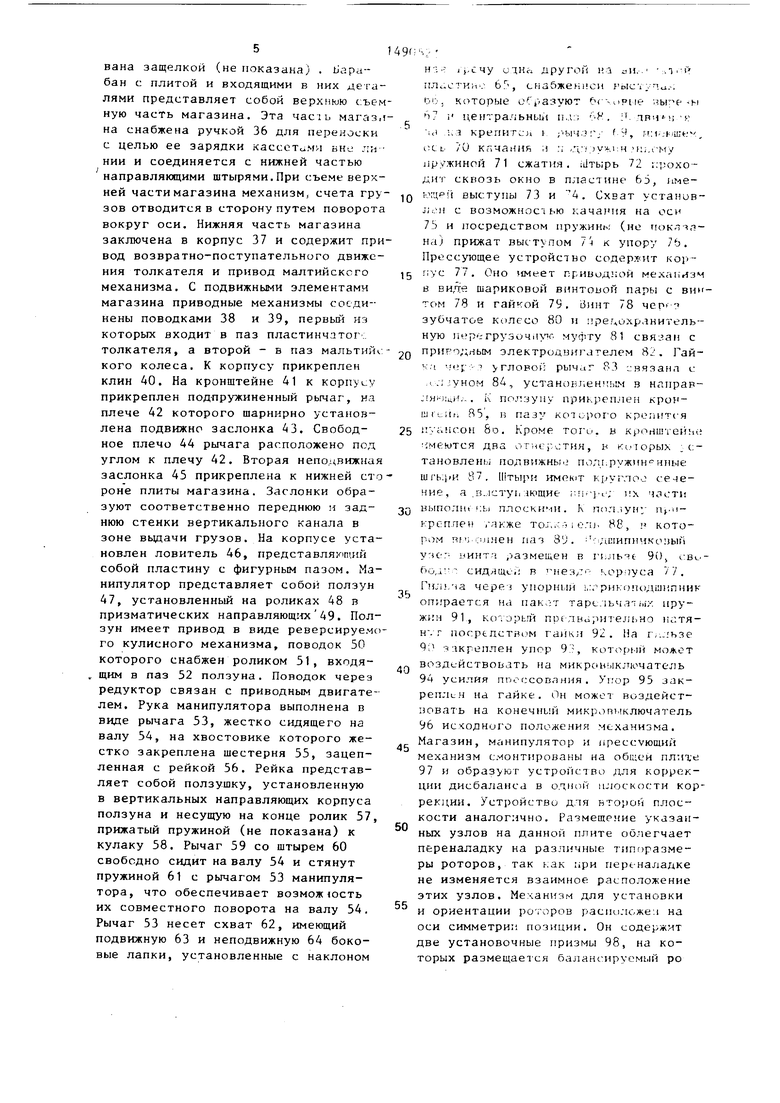
тора. Исполнительная позиция содержит средства для автоматической кор- ре1;ции дисбаланса. Сортирующая пози- ция содержит каретку 10, снабженную устройством для установки и удержания ротора, каретка установлена на направляющей, к которой примыкают лотки выходного накопителя. Транспорт представляет собой портал, на котором установлена ползущка 11, несущая четыре подвижных в вертикальном направлении руки 12, снабженных схватами 13. На портале установлены также приводные механизмы ползушки и рук. Исполнительная позиция содержит стол 14, на котором установлены магазины 15 для пощтучной выдачи грузов, манипуляторы 16 для их транс- Тюртировки, механизмы 17 лрессова- ния, механизм 18 для установки и ориентации ротора. Магазин содержит барабан 19, снабженный равномерно расположенными Т-образными пазами, в которые вставлены кассеты 20. Кассеты представляют собой фасонные трубчатые оболочки, снабженные соответствующими пазам выступами. В кассеты уложены стопками пластинчатые корректирующие массы 21. Барабан свободно насажен на ось 22, связанную
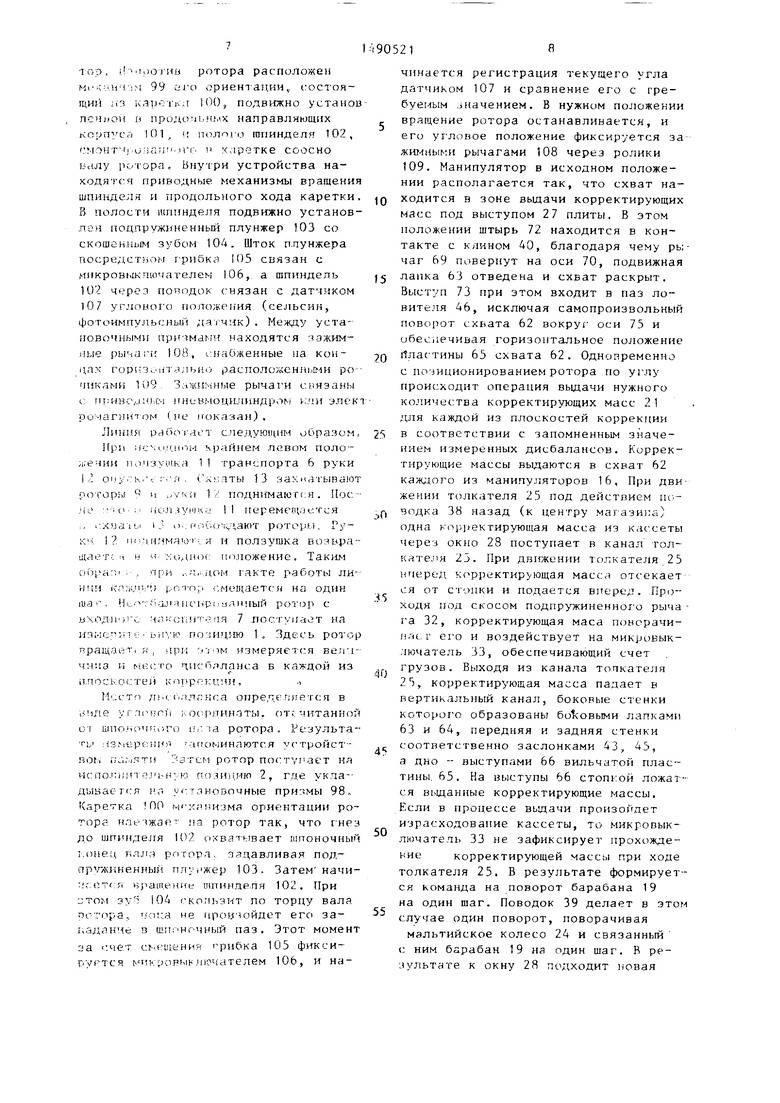
с плитой 23. С барабаном жестко связано мальтийское колесо 24 поворота барабана. Число пазов мальтийского колеса равно числу пазов для установки кассет в барабане. В плите выполнен канал, в котором размещен пластинчатый толкатель 25, толщина которого несколько меньще толщины корректирующей массы. Канал толкателя закрыт крышкой 26, поверхность которой находится на одном уровне с поверхностью плиты. Выступ 7 плиты является зоной выдачи корректирующих масс из кассеты. Под кассетой, находящейся против зоны выдачи, в крышке выполнено окно 28, размеры которого несколько превышают размеры корректирующей массы. Кроме того, в крьшке, толкателе и плите имеются сквозные пазы 29-31. Сквозь эти пазы проходит скошенный конец подпружиненного рычага 32, второй конец которого связан с микровыключателем 33, Подпружиненный рычаг и микровыключатель образуют механизм счета корректирующих масс. Он установлен на поворотной относительно оси 34 пластине 35, которая в рабочем положении заЛиксирпвана защелкой (не гюказана) . tJapa- бан с плитой и входящими в них дега- лями представляет собой верхнюю съемную часть магазина. Эта часiь магазина снабжена ручкой 36 для переноски с целью ее зарядки кассетами вне линии и соединяется с нижней частью
направляющими штырями.При съеме верхней части магазина механизм, счета грузов отводится в сторону путем поворота вокруг оси. Нижняя часть магазина заключена в корпус 37 и содержит привод возвратно-поступательного движения толкателя и привод малтийсксго механизма. С подвижными элементами магазина приводные механизмы соединены поводками 38 и 39, первьш из которьгх входит в паз пластинчатог толкателя, а второй - в паз мальтийского колеса. К корпусу прикреплен клин АО. На кронштейне 41 к корпусу прикреплен подпружиненный рычаг, на плече 42 которого шарнирно установлена подвижно заслонка 43. Свободное плечо 44 рычага расположено под углом к плечу 42. Вторая неподвижная заслонка 45 прикреплена к нижней стороне плиты магазина. Заслонки образуют соответственно переднюю и заднюю стенки вертикального канала в зоне выдачи грузов. На корпусе установлен ловитель 46, представляушцш собой пластину с фигурным пазом. Манипулятор представляет собой ползун 47, установленный на роликах 48 в призматических направляющ.чх 49. Ползун имеет привод в виде реверсируемого кулисного механизма, поводок 50 которого снабжен роликом 51, входящим в паз 52 ползуна. Поводок через редуктор связан с приводным двигателем. Рука манипулятора выполнена в виде рычага 53, жестко сидящего на валу 54, на хвостовике которого жестко закреплена шестерня 55, зацепленная с рейкой 56. Рейка представляет собой ползушку, установленную в вертикальных направляющих корпуса ползуна и несущую на конце ролик 57, прижатый пружиной (не показана) к кулаку 58. Рычаг 59 со штырем 60 свободно сидит на валу 54 и стянут пружиной 61 с рычагом 53 манипулятора, что обеспечивает возмож 1ость их совместного поворота на валу 54. Рычаг 53 несет схват 62, имеющий подвижную 63 и неподвижную 64 боковые лапки, установленные с наклоном
0
5
0
5
ii-cqy одна другой М п.. пл сткио , cнa5жe il cи Poic i уп.... bij. которые оГ азуют (-. г ыпе-hi )7 i центральньы п.л:: Н . ; . лп-i -1; ;
|с1 :,3 КреПИТСЛ 1 ;- ЫЧ.Л .-- f 9, ,4M-JbiiL4 - ,
ось 70 качания и :; ,. i,i:)y,i:H .ч;,чгму 1ружиной 71 сжатия. ;| ть;рь 72 ;;рохо- дит скгюзь окно в п:1астине 65, име- выступы 73 и 4. Схват устанив- j;r.-n с возможностью качания на оси 75 и посредством пружинь; (но гюклтл- на) прижат выступом 7 ч к упору 7Ь. Прессующее устройство содержит KOIV- г;ус 77. Оно имеет приводной меха1;г зм в виде шариковой винтоиой пары с вик- том 78 и гайкой 79. Винт 78 4epf зубчатое колесо 80 и ре.охрлнитель-- ную neperpysoMiiw. муфту 81 с приро;;нь м электродвигателем 82. Гайка . -т углороГ; рычаг 83 - :вязанл с ,..;jyHOM 84, установ, в напрар- ,if.., К ползуну прикреплен и 85. н пазу ксчорог о крепится Во. Кроме тог о. в KporiUiren ii; имеются дна отне -стня, в кс Юрых ; с:- тановлень подвижны. полгФужин -нные
0
6
0
5
0
5
их ктсти
К nd- Liyny llj.Ho.-i). 88. котоние, а .в..1стуь лющие ; выполи i;bi плоскими, кроплен , то.;..;.) ром Hf ) с:лнен паз 89. угк . ьинтл размешен в гьльяс 905 г-В.- f)O,i ; сидящо, в Л(ез/:г ь.с рпуса /7. Гильча чере j упорный /. рико кщшппник опирается на пак.гг тар.ьчат ь;;--. иру- жин 91, который пр( лва; ит ед1ьно патя- Н-. г nocpencTBiiM гаикл 92. На г,.льзе 40 з:1кгеплен упор 9., котормй может воздействоьать на микроьык;71очатель 94 усилия ппос;сования . Упор 93 закреплен на гайке. Он можо воздейст- иовать на конечный мик1)опь ключатель
96исходного положения механизма. Магазин, мг1нипулятор и прессующий механизм смонтированы на обшей плиге
97и образуют устройство для коррекции дисбаланса в одной плоскости коррекции. Устройство для второй плоскости аналогично. Размещение указанных узлов на данной плите облегчает переналадку на различные типоразмеры роторов, так ь:ак при riept-наладке не изменяется взаимное расположение этих узлов. Механизм для установки
и ориентации po i opoB расположен на оси симметрии позиции. Он содержит две установочные призмы 98, на которых размещается балансируемый ро
тор. H iporHB ротора расположен М1 ;. 99 ИГО ориентации, состоя- щиг из ;йэро 1 к;. 100, подвижно установ ПСИ1ЮИ в продомьнь х направляющих коип сл 101. полого гапиндел.я t02, г:монт .. in% i каретке соосно Кс1лу ротора, Бнуг ри устройства находятся приводные механизмы вращения шпинделя и продольного хода каретки. В полости шпинделя подвижно установлен подпружиненный плунжер 103 со скошенным зубом 104. Шток плунжера посредст зом Г рибка 105 связан с кикровыкпючателем 106, а шпиндель 10 Z через поподок связан с датчиком 107 углоиог о положения (сельсин, фотоимпульсныЛ да)чик). Между установочными при:1мами находятся зажимные рычаги 103, снабженные на концах ropin /iiTcUibHij располо/кенр1ьми ро тиками 109 Зажимные рычаги сянзаны
(.: rTI:HBC alUiC4 1ГНеВМОЦШИ1НДрОМ V.VUi ЭЛеК
ромагнтом (не показан),
JIiuiJiH работает следующим образом, и-сх(.1)гиом крайнем левом поло;1. ечии 1ь,111зуп ка 1 1 транспорта 6 руки
1Л о1)У :к,ч ; . я . 13 захиач ынают
р(ТТОрЫ 1 и /v-K;l 1 V: ПОДНИМа1 }ТГ;Я . ПоС.че iiOJi WiU- u II неремегцается ,. i-.xya iL.i i3 о.: г-| лС . poTopt.i. Ру- К Д 1. К лмлимя о -.-, я и ползушка возвращает: : и ч .ч;дно : ипложение. Таким оОра. i ,- при ..,;;,-иом гакте работы ли- г, т;и клау.- - po voji г,мев1;ается на один шаг, ..итчпсир- ааннын ротор с ь чод11 ) с Miv.fоп)Т.5(тя 7 .поступает на измет тя f- ьгр;ю позицию 1. Здесь ротор лращает, ,-,, .ари rrjiiM измеряется ветпчм: а к мйс го дис:б,тланса в каждой из
Г
плоскостей коррекции,,
Место д.; (.ЛоКса опре,ггс.П);ется в йиде угл1(П11 .; оо хпинчты. отсчитанной OI шпо- оччс.го 1ь: а ротора, Результа- ть .(;:HHM апоминаются устройст- p.oti г;а;.1яти Зэтем ротор поступает на испо.гплгт.з.пьную позицию 2, где укла- дывается на уг.тановочные призмы 98,. Каретка 00 механизма ориентации ротора нлезжаег t,a ротор так, что гнез до шпинде.ля 10. охватьшает пшоночный i.oae.n ял,11а ротора., зздавливая под- пр глчиненный гтлунжер 103. Затем начи- ;..::стся Hpariie:nne шпинде.пя 102, При стом зу : IQft скользит по торцу вала потора, ;от;а не гцтоцзойдет его за- кадлнче в шпоночный паз. Этот момент за 1чет сь.ч-щени.я ррибка 105 фикси- иустся ь М л ;к1рыь .мючателем 106, и на
чинается регистрация текущего угла датчиком 107 и сравнение его с гре- 6yei-ibiM знамением. В нужном положении врапдение ротора останавливается, и его угловое положение фиксируется за жимными рычагами 108 через ролики 109. Манипулятор в исходном положении располагается так, что схват находится в зоне вьщачи корректирующих масс под выступом 27 плиты, В этом положении штырь 72 находится в контакте с клином 40, благодаря чему рычаг 69 повернут на оси 70, подвижная лапка 63 отведена и схват раскрыт. Выступ 73 при этом входит в паз ловителя 46, исключая самопроизвольный поворот схвата 62 вокруг оси 75 и обес|1ечивая горизоптальное положение ГГластины 65 схвата 62. Одновременно с позиционированием ротора по углу происходит операция выдачи нужного количества корректирующих масс 21 для каждой из плоскостей коррекции в соответствии с заиомненным значением измеренных дисбалансов. Корректирующие массы выдаются в схват 62 каяддого из манипуляторов 16, При движении толкателя 25 под действием поводка 38 назад (к центру магазина) одна кор)ектирутощая масса из кас.сеты через окно 28 иоступает в канал тол- сате.пя 23. При движении толкателя 25 нг|еред корректирующая масса отсекает ся от стопки и иодается вперед. Про-- ходя под скосом подпружиненног о рыча - га 32, корректир тощая маса поворачи- fiac V его и воздействует на микровык- .тючатель 33, обеспечивающий счет грузов. Выходя из канала топкателя 25, корректирующая масса падает в вертикальный канал, боковые стенки которог о образованы боТчовыми лапками 63 и 64, передняя и задняя стенки соответственно заслонками 43, 45, а дно - выступами 66 вильчатой пластины. 65. На выступы 66 стопкой ложатся выданные корректирующие массы. Если в процессе произойдет израсходование кассеты, то микровык- ли)чате.пь 33 не зафиксирует прохождение корректирующей массы при ходе толкателя 25, В результате формируется команда на поворот барабана 19 на один шаг. Поводок 39 делает в этом случае один поворот, поворачивая
мальтийское колесо 24 и связанный с ним барабан 19 на один щаг. В результате к окну 28 пс дходит новая
15
кассета. После вьщачи нужного количества корректирующих масс в схват
62включается привод манипулятора и ; поводок 50 совершает поворот на
180, посылая ползун 47 манипулято- ра вперед. При этом штырь 72 сходит ,с клина 40, подвижная боковая лапка.
63смещается к неподвижной 64 и схват 62 закрывается, собирая корректирую- Q щие массы в пакет. Пакет надежно фиксируется в схвате 62 при любом его положении благодаря тому, что боковые лапки 63 и 64 установлены с наклоном навстречу друг другу относительно пластины 65. Заслонка 43 при движении охвата 62 вперед утапливается за счет поворота подпружиненного плеча
42 и схват 62 проходит над ней. В процессе движения манипулятора 16 ролик 57 катится по кулачку 58, перемещая рейку 56. Рейка через шестерню 55 поворачивает вал 54 так, что в крайнем переднем положении ползуна 47 манипулятора рычаг 53 и вильчатая пластина 65 с находящимся на ней пакетом корректирующих масс занимают вертикальное положение. Пакет грузов располагается строго против кольцевого паза ротора 9, а штырь 60 на рычаге 59 манипулятора входит в паз 89 толкателя 88. После этого включается прессующее устройство и ползун 84 движется к ротору. Ползун 84 посредством паза 89 через штырь 60 ведет за собой рычаг 59 манипулятора и связанный с ним пружиной 61 рычаг 53, несущий схват 62. Боковые лапки 63, 64 и расположенный между
20
25
30
35
центральньй паз ;Й BUJ;ьчатгк njiai ны 65, вступает и контакт сз cTei кольцевого паза ротора, которьп с щается до упора в противоположну; призму 98. При этом ролики 109, ч жимающие ротор, не препятствуют е осевому смещению, но предохраняют ротор от случайного проворота. По упора ротора в призму начинается пластическая деформация кромок ко цевого паза ротора и образование местных выступов, крепящих грузы. процессе прессования нагружается |Кет предварительно сжатых тарельч тых нружин 91 в опорном узле винт j78 прессующего устройства. После тижения усилием прессования задан ного значения происходит просадка пакета пружин 91 и опирающейся на него гильзы, в результате чего уп 93 воздействует на микровыключате 94, от которого поступает команда реверс хода пуансона. Прл обратно ходе ползуна 84 боковые лапки 63 64 схвата 62 вьшодятся из паза ро ра благодаря воздействию толкател 88 через штырь 60 на рычаг 59. За происходит раскрытие рычагов 108 механизм 1В ориентации ротора пов чивает его для установки корректи ющих масс 2t во второй плоскости рекции. Эта операция производится аналогично предыдущей. После этог все механизмы возвращаются в исхо ные положения. При обратном ходе нипулятора 16 выступ 73 схвата 62 попадает в паз ловителя 46 и скол зит по нему. Благодаря этому прои
ними пакет корректирующих масс входят ходит доворот схвата 62 на оси 75
в кольцевой паз ротора, а затем боковые лапки упираются в дно кольцевого паза, причем схват 62 самоустанавливается на оси 75, обеспечивая прилегание обеих лапок к дну паза. После этого рычаг 53 останавливается, а рычаг 59 движется дальше, так как продолжается движение ползуна 84 прессующего устройства. Избыток хода рычага 59 поглощается пружиной 61, натяжение которой обеспечивает плотное прижатие боковых лапок к дну паза. В процессе дальнейшего движения ползуна 84 подпружиненные штыри 87 входят в боковые вырезы 67 вильчатой пластины 65 схвата и, встречая пакет грузов, досылают его до упора в дно кольцевого паза и прижимают к нему. После этого пуансон 86, пройдя через
45
50
55
до горизонтального положения и фи ция его в этом положении. Кроме т при обратном ходе задняя кромка с та 62 наезжает на плечо 44, в рез тате рычаг, поворачиваясь, подним ет заслонку 43 в рабочее положени Шарнирное крепление заслонки 43 к плечу 42 обеспечивает ее плотное легание к вильчатой пластине 65. П подходе схвата 62 к магазину 15 штырь 72 входит в контакт с клином 40, благодаря чему отводится рыча 69 с подвижной боковой лапкой 63. Таким образом, в крайнем заднем по жении манипулятора 16 схват 62 рас крыт и готов к приему корректирующ масс. На исполнительной позиции ус новлены микровыключатели (не показа регистрирующие крайнее положение x
5
Q
0
5
0
5
центральньй паз ;Й BUJ;ьчатгк njiai:/ :- ны 65, вступает и контакт сз cTeiiKni-tn кольцевого паза ротора, которьп смещается до упора в противоположну;. призму 98. При этом ролики 109, ча- жимающие ротор, не препятствуют его осевому смещению, но предохраняют ротор от случайного проворота. После упора ротора в призму начинается пластическая деформация кромок кольцевого паза ротора и образование местных выступов, крепящих грузы. В процессе прессования нагружается па- |Кет предварительно сжатых тарельчатых нружин 91 в опорном узле винта j78 прессующего устройства. После достижения усилием прессования заданного значения происходит просадка пакета пружин 91 и опирающейся на него гильзы, в результате чего упор 93 воздействует на микровыключатель 94, от которого поступает команда на реверс хода пуансона. Прл обратном ходе ползуна 84 боковые лапки 63 и 64 схвата 62 вьшодятся из паза ротора благодаря воздействию толкателя 88 через штырь 60 на рычаг 59. Затем происходит раскрытие рычагов 108 и механизм 1В ориентации ротора поворачивает его для установки корректирующих масс 2t во второй плоскости коррекции. Эта операция производится аналогично предыдущей. После этого все механизмы возвращаются в исходные положения. При обратном ходе манипулятора 16 выступ 73 схвата 62 попадает в паз ловителя 46 и скользит по нему. Благодаря этому проис ходит доворот схвата 62 на оси 75
45
50
55
до горизонтального положения и фиксация его в этом положении. Кроме того, при обратном ходе задняя кромка схвата 62 наезжает на плечо 44, в результате рычаг, поворачиваясь, поднимает заслонку 43 в рабочее положение. Шарнирное крепление заслонки 43 к плечу 42 обеспечивает ее плотное прилегание к вильчатой пластине 65. При подходе схвата 62 к магазину 15 штырь 72 входит в контакт с клином 40, благодаря чему отводится рычаг 69 с подвижной боковой лапкой 63. Таким образом, в крайнем заднем положении манипулятора 16 схват 62 раскрыт и готов к приему корректирующих масс. На исполнительной позиции установлены микровыключатели (не показаны), регистрирующие крайнее положение x)vкн манипулятора и промежуточное положение ползуна прессующего устройства при его движении к ротору. Это Позволяет дать команду на реверс рабочего хода прессующего устройства в случае, если из-за поступления некачественного ротора с деформированным КОЛЬЦОВЫМ пазом лапки манипутановкой корректирующих масс, содержащая последовательно установленные измерительную позицию, исполнительную позицию с механизмами для установки и ориентации ротора и с механизмом прессования, контрольную позицию и сортирующую позицию, а также транспорт, установленный с возмож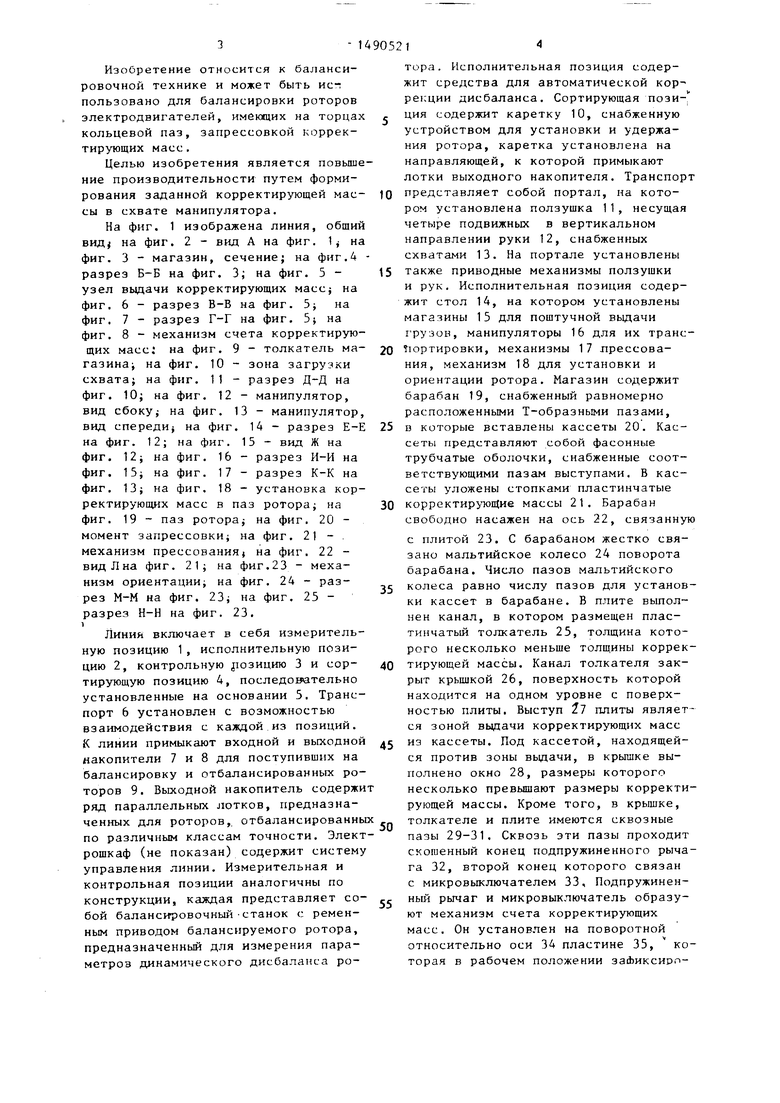
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Устройство для изготовления проволочных штырей и запрессовки их в изделие | 1988 |
|
SU1593879A2 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1984 |
|
SU1214290A1 |
| Устройство для подбора пар радиоэлементов, преимущественно конденсаторов и резисторов | 1986 |
|
SU1522440A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для изготовления петель | 1986 |
|
SU1444041A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ БЛОКОВ ПРЕССОВАНИЕМ, ПРЕСС-ФОРМА И ЛИНИЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1995 |
|
RU2087307C1 |
| Автоматизированный комплекс для многопереходной штамповки | 1986 |
|
SU1349851A1 |
| Устройство для выдачи билета и сдачи | 1979 |
|
SU868800A1 |
| Установка для прессования многослойных бетономозаичных плит | 1981 |
|
SU973370A1 |
Изобретение может быть использовано для балансировки роторов электродвигателей, имеющих на торцах кольцевой паз, запрессовкой корректирующих масс и позволяет повысить производительность путем формирования требуемого пакета корректирующих масс в схвате манипулятора. Линия включает в себя измерительную позицию, исполнительную позицию, контрольную позицию и сортирующую позицию, последовательно установленные на основании. Транспорт установлен с возможностью взаимодействия с каждой из позиций. На исполнительной позиции выполняется установка на ротор корректирующих масс с помощью механизмов установки и ориентации ротора, механизма прессования, манипулятора. Схват манипулятора выполнен в виде закрепленных на нем вильчатой пластины 65 с вырезами для размещения элементов механизма прессования и охватывающих ее двух боковых лапок 63, 64, установленных навстречу друг другу. Размещенная на исполнительной позиции подвижная заслонка установлена с возможностью поворота и подпружинена в направлении схвата. Она используется при формировании пакета корректирующих масс в механизме схвата. 1 з. п. ф-лы, 25 ил.
зиции, отличающаяся тем, что, с целью повышения производительности, она снабжена заслонкой, размещенной на исполнительной позиции.
лятора не могут войти в паз и коррек- Q ностью взаимодействия с каждой из по- ция ротора не должна производиться. Отбалансированный на исполнительной позиции 2 ротор поступает на контрольную позицию 3, где измеряется его остаточный дисбаланс. Затем ротор 15 предназначенным для обслуживания поступает на каретку 10 сортирующей исполнительной позиции манипулятором позиции 4. В зависимости от величины остаточного дисбаланса каретка транспортирует ротор к соответствующему
20
лотку, выходного накопителя 8, после чего удерживающее устройство освобождает ротор, и он скатывается на лоток накопителя.
Формула изобретения
зиции, отличающаяся тем, что, с целью повышения производительности, она снабжена заслонкой, размещенной на исполнительной позиции.
ностью взаимодействия с каждой из по- предназначенным для обслуживания исполнительной позиции манипулятором
ностью взаимодействия с каждой из по- предназначенным для обслуживания исполнительной позиции манипулятором
со схватом в виде вильчатой пластины с вьфезами, предназначенными для размещения злементов механизма прессования, и охватывающих ее двух боковых лапок, установленных с наклоном навстречу одна другой.
cfjua.f
8
Вид А
фцг.2
39
37
(J3US.3
20
71
(ригЛ
27
ери г. 5
2Ъ
в в
r-r
.26
-29
.2В
сриг.6
I
сри.7
U.2
фиг{0
Ж
49
аг, П
fjQ
Фиу. f3
50
Фиг.1
и-и
ьв
Фиг.16
89
Фиг. 18
Фи$. 17
86
81
1
21
J
Фиг. 19
Фиг. 20
Фиг. 21
Вид л
Фиг. 22
107
М -М
фиг. 2
Фиа 23
Н-Н
ГО9
98
(риг 25
| Автоматическая балансировочная линия | 1985 |
|
SU1272134A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ выплавки железа из стали непосредственно из руд и электрическая печь для означенной цели | 1925 |
|
SU9794A1 |
| М.: НИИМАШ, 1975. | |||
