(54) МАНИПУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU871991A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1980 |
|
SU919804A1 |
| Погрузочно-транспортный агрегат | 2022 |
|
RU2776189C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| Телескопическая стрела манипулятора | 1976 |
|
SU555007A1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| Система управления манипулятором | 1980 |
|
SU884997A1 |
| Гидравлический кран-манипулятор | 1975 |
|
SU865771A1 |
Лзобретение относится к станкостроению и может быть использовано при работе с вредными для здоровья человека веществами и во вредных средах, например, в Горячих камерах и боксах.
Известен манипулятор, содержащий управляющий и исполнительный органы, образованные из плоских щарнирных механизмов с кистевыми узлами дифференциального типа на их концах, и соединительное звено с опорой.
Недостатком этого манипулятора является низкая надежность в работе и недолговечность из-за наличия в конструкции гибких элементов.
С целью повышения надежности и долговечности, в предложенном манипуляторе шарнирные механизмы управляющего и исполнительного органов кинематически связаны между собой посредством зубчатых пар, размещенных в соединительном звене, а кистевые узлы снабжены индивидуальными приводами, например, гидроприводами, соединенными трубопроводами.
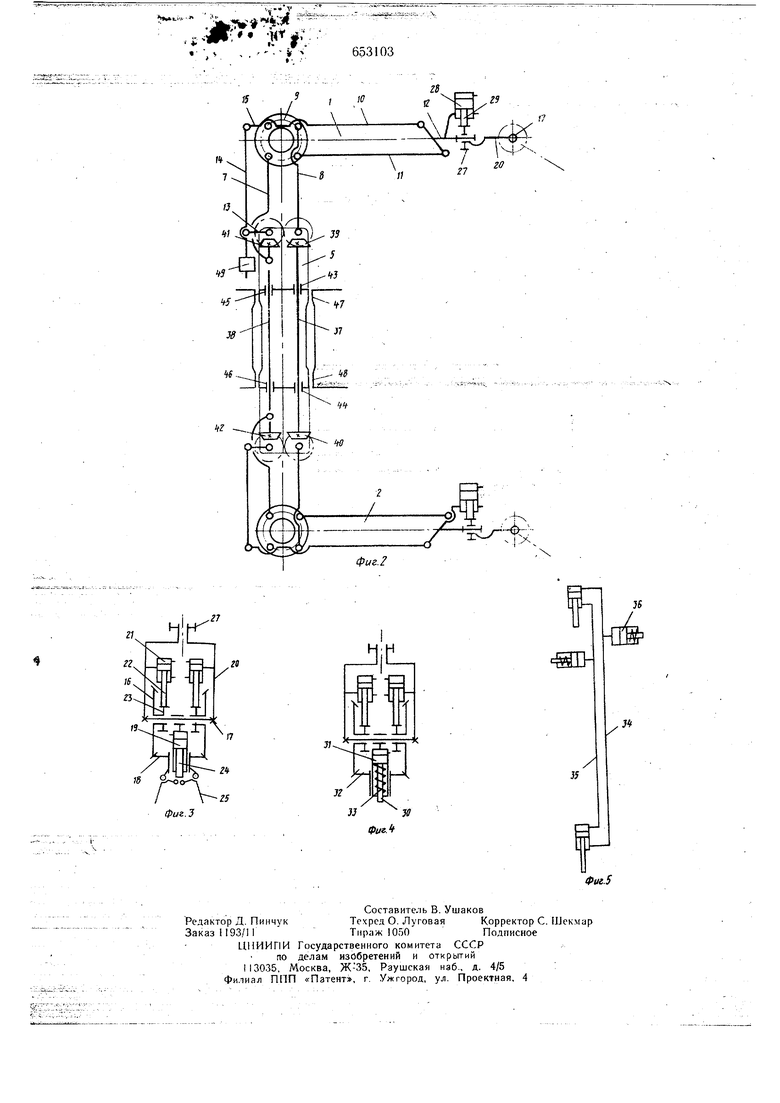
Ыа фиг. 1 изображен манипулятор, обН1ИЙ вид; на фиг. 2 - кинематическая схема манипулятора (без кистевых узлов); на
фиг. 3 -- кинематическая схема кистевого узла управляющего органа; на фи1. 4 - кинематическая схема кистевого узла исполнительного органа;на фиг, 5 - схемя соединения трубопроводами гидропривода кистевого узла управляющего органа с соответствующим гидроприводом кистевого узла исполнительного органа (кроме гидроприводов, расположенных в сателлитных шестернях) :
Манипулятор состоит из управляющего 1 и исполнительного 2 органов с кистевыми узлами 3 и 4 на конце и соединительного звена 5, расположенного в опоре 6, заделанной в стене (перегородке). Кистевые узлы 3 и 4 снабжены индивидуальными приводами, например гидроприводами.
Управляющий орган 1 образован из плоского шарнирного механиз.ма, смонтированного из трех шарнирных параллелогра.ммов: первого, состоян1его из звеньев 7 и 8, шарнирно-спязаннь:.х с концом Соединительного зпси.ч 5, и четырсхигарцирного звена 9; второго, состоящего из звеньев 10 и 11, присоединенных к звену 9, и звена 12, к которому шариирно присоединен кистевой узел 3; третьегг состоящего из звена 13, связанного с соединительным звеном 5, звена 14 и звена 15, жестко связанного со звеном 10 и имеющего с ним общий шарнир на звене 9.
Исполнительный орган 2 выполнен аналогично управляющему, но связан он со вторым концом соединительного звена 5, а к внешнему звену второго параллелограмма шарнирно присоединен кистевой узел 4.
Кистевой узел 3 выполнен в виде конического дифференциала, состоящего из солнечных шестерен 16, сидящих на оси дифференциала 17, и сателлитной шестерни 18, осью для которой является корпус гидропривода 19.
К корпусу 20 кистевого узла 3 прикреплены два гидропривода 21, каждый из которых состоит из гидроцилиндра и поршня со Д1ТОКОМ 22, внешний конец которого снабжен зубьями.
Этими зубьями штоки 22 соединяются с ЦJecтepнями 23, скрепленными с солнечными шестернями 16.
Гидропривод 19 также состоит из гидроцилиндра со штоком 24, внешний конец которого контактирует с двумя коленчатыми рычагами 25, шарнирно связанными с выступами втулки сателлитной шестерни 18.
Внешние концы коленчатых рычагов 25 предназначены под пальцы руки оператора, а рукоять 26, жестко присоединенная к втулке сателлитной шестерни 18, - под его ладонь. Ось рукоятки 26 расположена перпендикулярно к плоскости действия рычагов 25.
К корпусу 20 кистевого узла 3 прикреплена также шестерня 27, которая свободно вращается относительно хвостовика звена 12. К этому звену прикреплен гидропривод 28, состоящий из гидроцилиндра и поршня со HITOKOM 29, внешний конец которого снабжен зубьями, находящи мися в зацеплении с шестерней 27.
Кистевой узел 4 выполнен в основном аналогично кистевому узлу 3. Отличие заключается в том, что на штоке 30 гидропривода 31, размещенного в сателлитной шестерне 32, посажена пружина 33 для возврата штОка с поршнем в исходное (втянутое) положение. Шток 30 при выдвижении из цилиндра своим внешним конЦом воздействует на инструмент или другой рабочий орган, который насаживается на втулку сателлитной шестерни 32.
Связь каждого гидроцилиндра гидропривода 21 кистевого узла 3 с соответствуюШимй тйдроцилиндрами кистевого узла 4 осуществляется двумя соединительными трубопроводами 34 и 35, которые снабжены компенсаторами 36 давления для поддержания постоянного давления рабочей жидкости в гидросистеме. ..
Аналогично соединены между собой трубопроводами гидроцилиндры гидроприводов 28 кистевых узлов 3 и 4.
Гидроцилиндры гидроприводов 19 и 31
кистевых узлов 3 и 4 соединены между собой одним трубопроводом, к которому также подключен компенсатор давления.
Соединительное звено 5 имеет внутри два вала 37 и 38, которые через конические зубчатые пары 39, 40 и 41, 42 кинематически связывают звенья 8 и 13 управляющего механизма 1 с соответствующими звеньями исполнительного механизма 2.
Валы 37 и 38 в подшипниках 43, 44, 45, 46 и соединительное звено 5 в подшипниках 47 и 48 снабжены уплотнениями (манжетами) для герметизации.
Соединительные трубопроводы гидросистем расположены в контурах управляющего и исполнительного 2 органов и в соединительном звене 5 по отношению к нему также герметизированы уплотнениями в двух местах по длине звена 5.
Массы управляющего 1 и исполнительного 2 органов с кистевыми узлами 3 и 4 уравновешены грузом 49, расположенным на удлиненной части звена 14 управляющего органа 1.
Манипулятор имеет семь степеней свободы (движений): две - за счет плоских шарнирных механизмов управляющего 1 и исполнительного 2 органов; одну - за счет
качания всего манипулятора в опоре 6; одну - за счет вращения кистевых узлов 3
и 4 относительно осей шестерен 27; две
за счет качания относительно осей дифференциалов 17 и вращения относительно осей сателлитных шестерен 18 и 32 кистевых узлов 3 и 4; одну -- за счет перемещения щтокоп 24 и 30 гидроцилиндров 19 и 31, приводимых в движение в одном направлении рычагами 25, в другом - пружиной 33.
Манипулятор работает следующим образом.
Ладонь оператора прикладывается к рукоятке 26, а пальцы - к рычагам 25 кистевого узла 3.
При перемещении кистевого узла 3 в трех взаимно перпендикулярных направлениях в соответствующих направлениях будет перемещаться и кистевой узел 4.
При вращении кистевого узла 3 относительно оси щестерни 27 в том же направлении будет вращаться кистевой узел 4 относительно оси аналогичной шестерни.
i;
При качании сателлитной шестерни 18 относительно оси дефференциала 17 кистевого узла 3 в. том же направлении будет качаться сателлитная шестерня 32 кистевого узла 4.
При вращении сателлитной шестерни 18 кистевого узла 3 относительно собственной оси в том же направлении будет вращаться сателлитная шестерня 32 кистевого узла 4.
При нажатии на рычаги 25 шток 30 кистевого узла 4 будет выходить наружу, приводя тем самым в движение инструмент, а в исходное положение рычаги 25 приводятся пружиной 33 кистевого узла 4 после прекращения нажима.
Формула изобретения
Манипулятор, содержащий управляющий и исполнительный органы, образованные из плоских шарнирных механизмов с кистевыми узлами дифференциального типа на их концах, и соединительное звено с опорой, отличающийся тем, что, с целью повыщенИя надежности и долговечности, шарнирные механизмы управляющего и исполнительного органов кинематически связаны между собой посредством зубчатых пар, размещенных в соединительном звене, а кистевые узлы снабжены индивидуальными приводами, например, гидроприводами, соединенными трубопроводами.
и
Фчг.Ч
Wrv
- ,,m
653103
фиг.
JZ
фиг.З
JS
A
j«
/
/
J5
