25
.Jrf/ /i xi
f/-НФ)
-П I
..
ел о сд ел
Изобретение относится к области машиностроения и может быть использовано в конструкциях манипуляторов.
Целью изобретения является расширение Технологических возможностей путем обеспечения объемности зоны обслуживания.
j На чертеже представлена схема манипулятора.
Электродвигатель 1 соединен с криво- 2 регулируемой длины, который через сферический шарнир 3 связан с уни- |версальным шарниром 4 посредством вилки 5, установленной в основании 6. С вилкой 5 скреплен коленчатый вал 7, установленный опорах 8. Коленчатый вал 7 связан р коленчатым валом 9 через тягу 10, соединенную сферическими шарнирами И. Коленчатый вал 9 установлен в опорах 12. (Зубчатый сектор 13 жестко связан с колен- Матым валом 9. С сектором 13 взаимодейст- 1вует зубчатое колесо 14, с которым свя- fjaH схват 15. Рука манипулятора выполне- |на в виде стержневой призмы, в частности, параллелепипеда, образованного стержнями 16 равной длины, причем их длины равны длине тяги 10. В верши- inax параллелепипеда установлены сферические Н1арниры 17. Для поворота стержневого параллелепипеда в горизонтальной плоскости используется привод 18, соединенный с кривон1ипом 19 изменяемой длины. Кри- В01ПИП 19 через сферический П1арнйр 20 :вязан с универсальным шарниром 21, |к которому присоединены вилки 22 и 23. Вилка 22 установлена с возможностью вра- :П1ения в опоре 24, вилка 23 связана ;со стержнем 16 параллелепипеда. Для пово- :рота в вертикальной плоскости используется :электродвигатель 25, кривонжп 26 изменяе- ;мой длины, сферический шарнир 27, кресто- вина 28, вилки 29 и 30. Вилка 30 установлена в опоре 31.
Манипулятор работает следуюпгим образом.
При включении электродвигателя 1 движение посредством кривошипа 2, универсального шарнира 4, вилок 5, коленчатых валов 7 и 9, соединенных тягой 10, зубчатых колес сообщается возвратно-враш.а- тельное схвату 15. Для поворота схва- та 15 в горизонтальной плоскости включается электродвигатель, который через кривошип 19, универсальный шарнир 21 сообшает возвратно-враш.ательное движение вилке 23 и связанному с ней стержню 16. Поворот в вертикальной плоскости осу- шествляется аналогично от электродвигателя 25.
Формула изобретения
Манипулятор, содержаший основание, руку из шарнирно связанных между собой стержней, два основных привода перемеш.е- ния руки по координатным осям, выполненных в виде электродвигателей и кривошипов со сферическими шарнирами на их концах, а также схват, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения объемности зоны обслуживания, он снабжен третьим приводом руки, аналогичным двум основным, а сама рука выполнена из стержней, собранных в призму с изменяемыми между смежными стержнями углами, в вершинах которых установлены сферические шарниры, при этом кривошипы всех приводов выполнены с изменяемыми длинами и соединены каждый с соот- ветствуюшим стержнем руки, расположенным по одной из трех координатных осей, посредством дополнительно введенных трехстепенных универсальных шарниров, один из которых установлен в основании и снабжен двумя связанными между собой посредством тяги коленчатыми валами, при этом один из коленчатых Е1алов соединен с дополнительно введенной ;1убчатой передачей, ведомое колесо которой закреплено на схвате.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
| Стержневой манипулятор | 1985 |
|
SU1323361A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2006 |
|
RU2313478C1 |
| Захват манипулятора | 1987 |
|
SU1511115A1 |
| РЕКЛАМНО-ИНФОРМАЦИОННЫЙ СТЕНД | 2004 |
|
RU2267165C1 |
| Устройство для струйной обработки поверхностей | 1976 |
|
SU682286A1 |
| Манипулятор | 1985 |
|
SU1281400A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
Изобретение относится к машиностроению и может быть использовано в конструкциях манипуляторов. Целью изобретения является расширение технологических возможностей путем обеспечения объемности зоны обслуживания. В начале работы включается электродвигатель 1, который через кривошип 2, универсальный шарнир 4, коленчатые валы 7 и 9, тягу 10, зубчатое колесо 14 и сектор 13 сообщает возвратно-вращательное движение схвату 15. Для поворота последнего в горизонтальной плоскости включается электродвигатель 18, который через кривошип 19, универсальный шарнир 21 сообщает возвратно-вращательное движение вилке 23 и связанному с ней стержню 16. Поворот в вертикальной плоскости осуществляется от электродвигателя 25 аналогично описанному. 1 ил.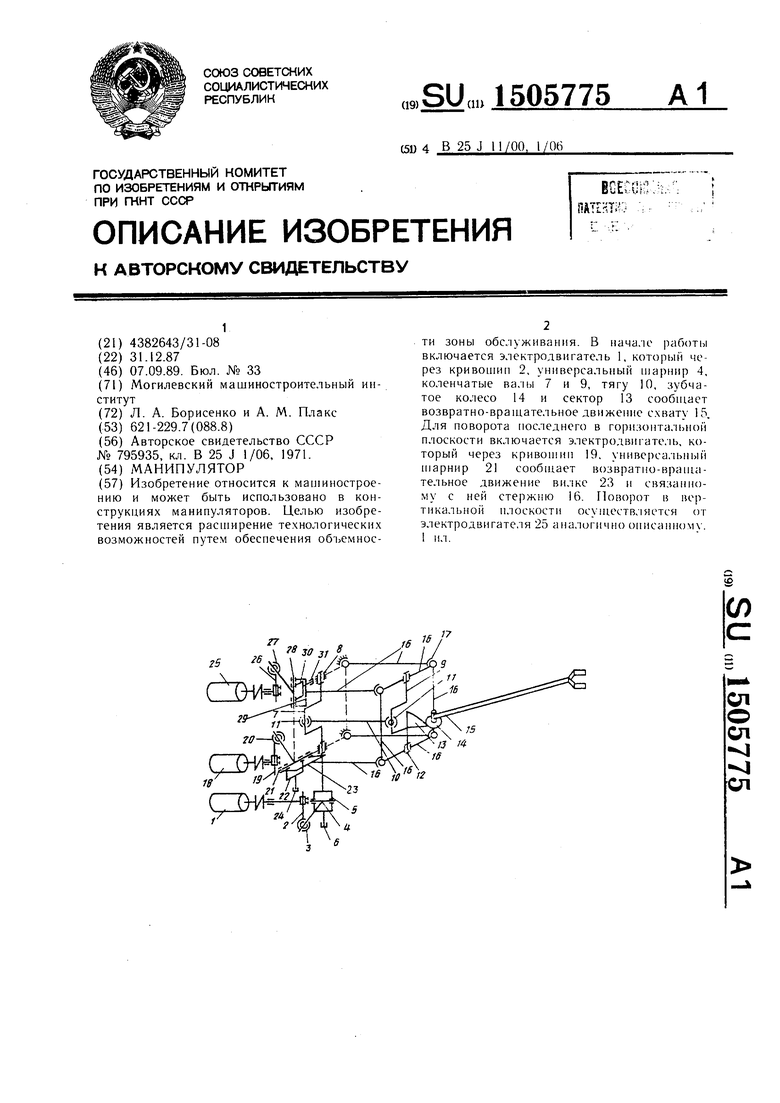
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
