Изобретение относится к машиностроению, в частности к станкостроению, и может быть использовано преимущественно в шпиндельных узлах коробок скоростей и подшипниковых узлах механизмов станков, выполненных на базе гидростатических подшипников скольжения.
Цель изобретения - расширение технологических возможностей.
Указанная цель достигается за счет повышения чувствительности изменения радиальной составляющей силы резания.
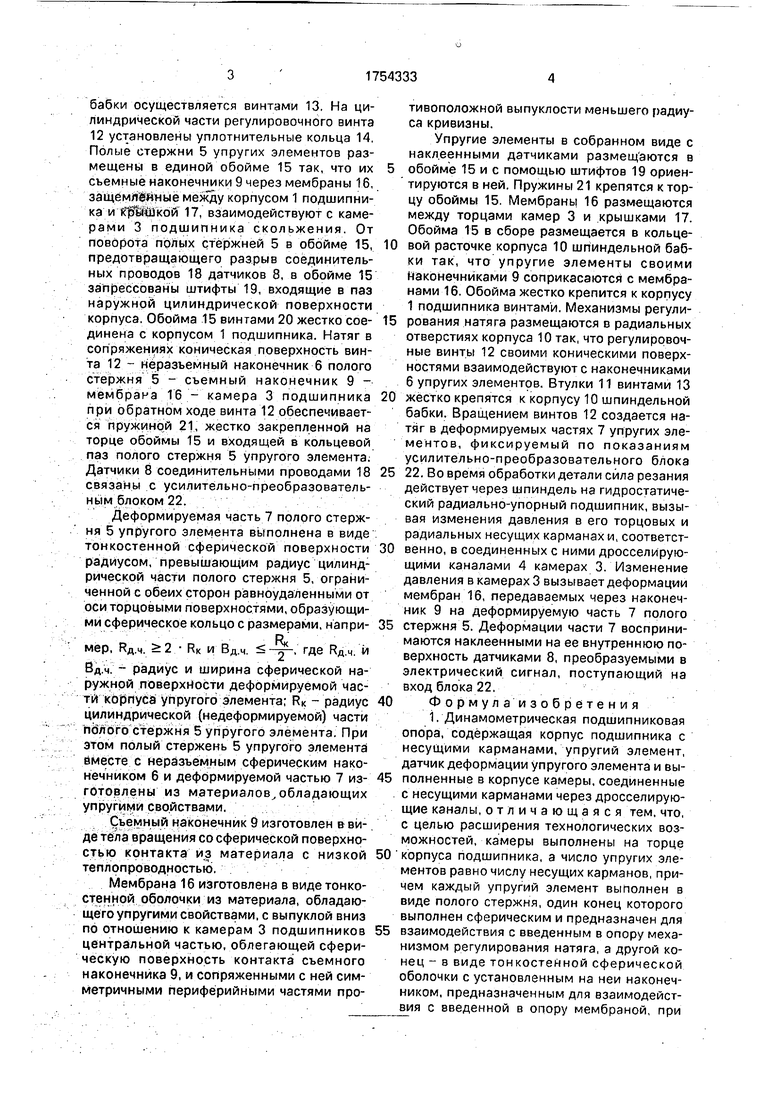
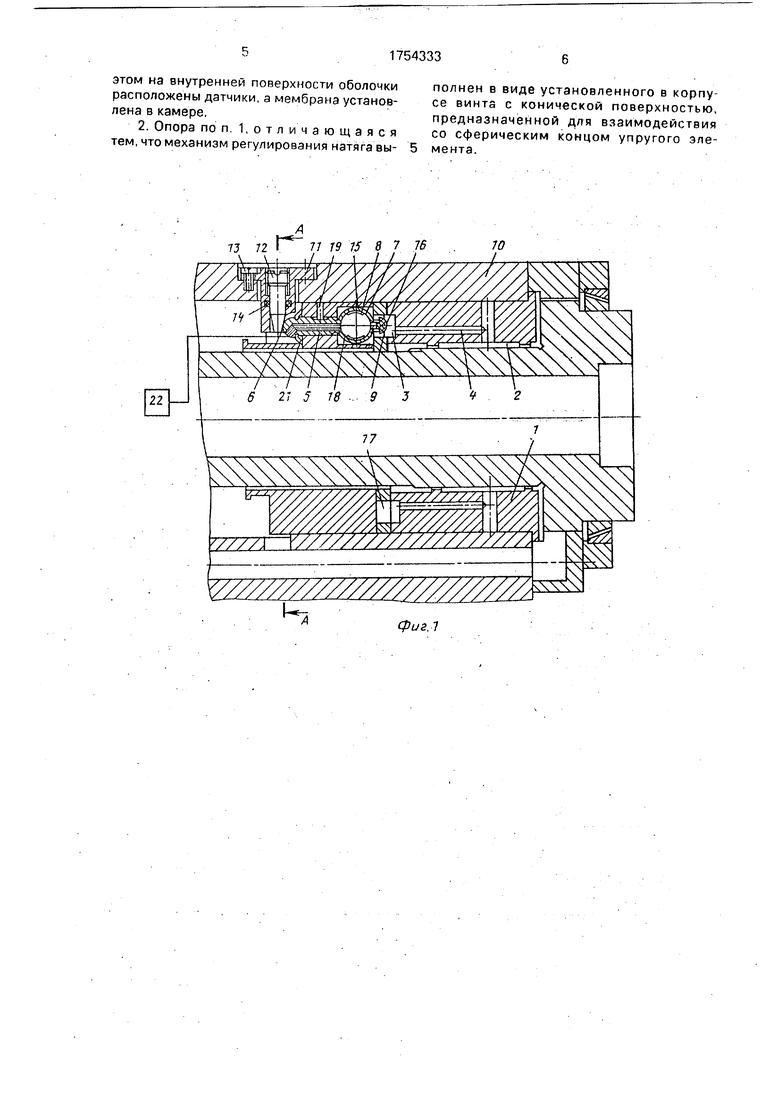
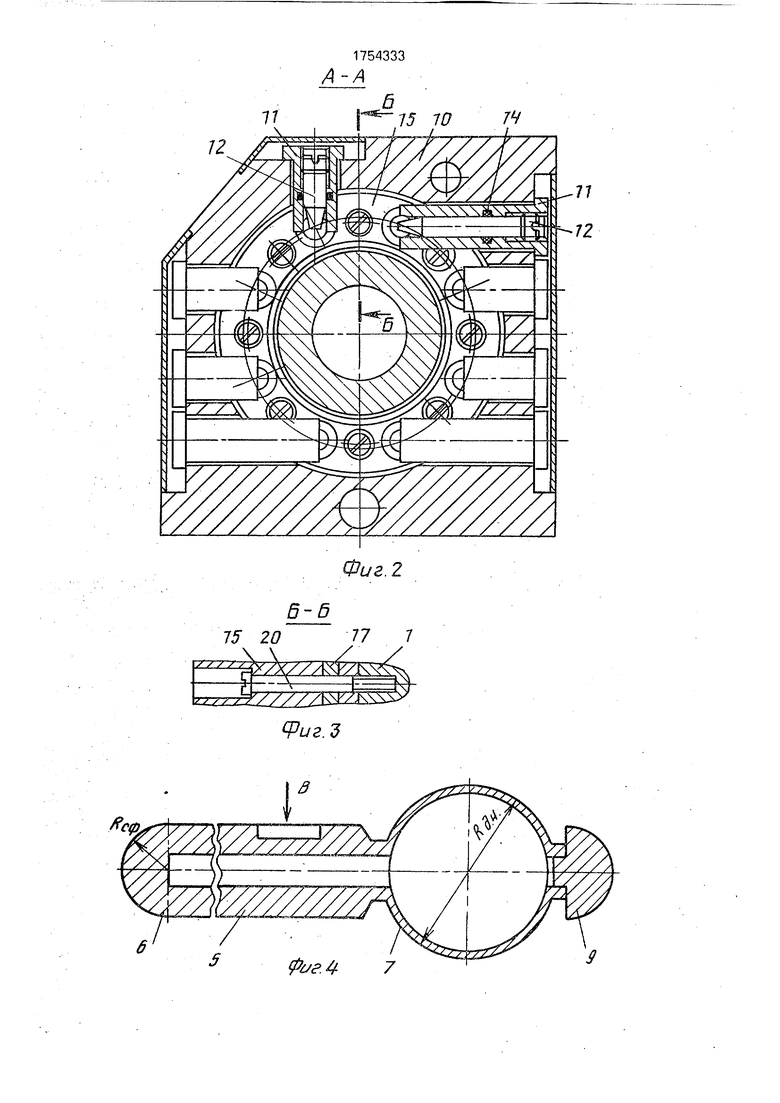
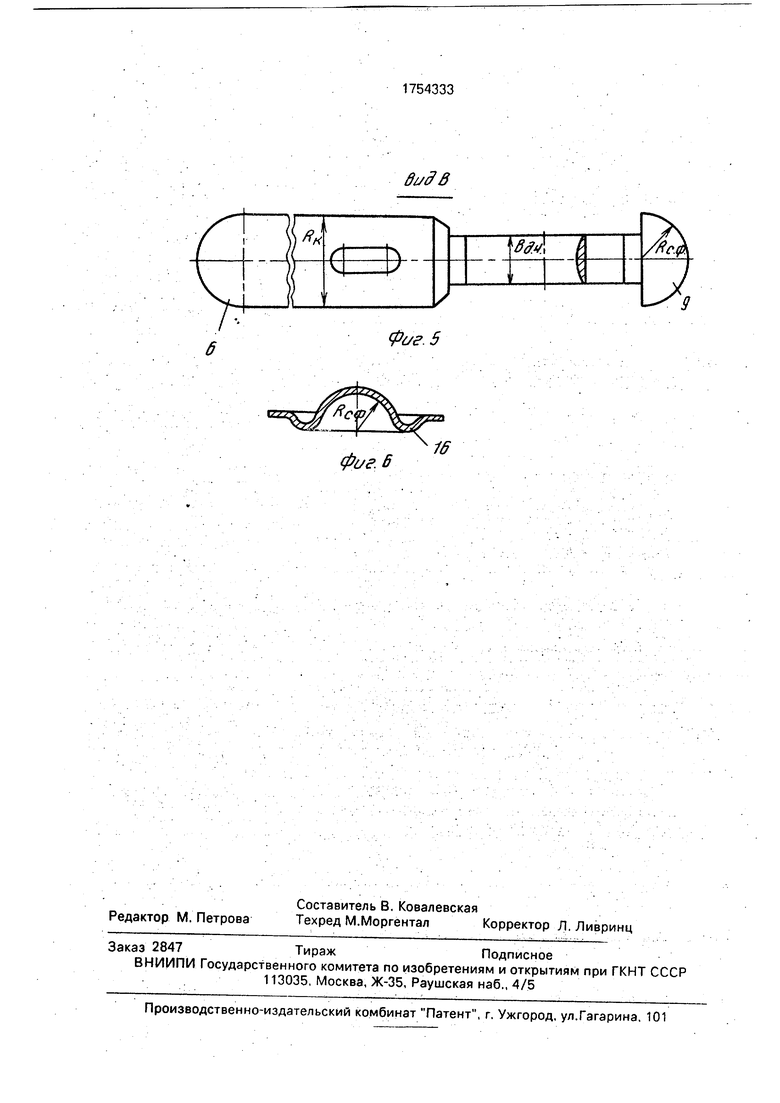
На фиг. 1 изображена динамометрическая подшипниковая опора, осевой разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - корпус упругого элемента со съемным наконечником; на фиг. 5 - вид В на фиг 4, на фиг. 6 - мембрана.
Динамометрическая подшипниковая опора содержит корпус 1 с несущими карманами 2. На торце корпуса 1 выполнены камеры 3, по изменению давления в которых можно судить об изменении давления в несущих карманах 2, связанные с карманами дросселирующими каналами 4. Упругий элемент выполнен по числу несущих карманов подшипника сборных конструкций, в состав каждой из которых входят полый стержень 5 с неразъемным сферическим наконечни- ком°6 с его протяженной стороны и деформируемой частью 7 с размещенными на ее внутренней стороне датчиками 8 и съемным наконечником 9 - с другой стороны Для создания натяга в деформируемой части 7 полого стержня 5 использован механизм регулирования натяга, состоящий из вмонтированной с корпус 10 шпиндельной бабки втулки 11, в которой размещен подвижный в направлении, перпендикулярном оси корпуса, регулировочный винт 12 с микрометрической резьбовой поверхностью с одной стороны и с опорШУй конической поверхностью - с другой стороны. Конической поверхностью винт 12 взаимодействует с неразъемным сферическим наконечником 6 полого стержня 5 упругого элемента, Крепление втулки 11 к корпусу 10 шпиндельной
VI
Ј
СлЭ 00 Сл)
бабки осуществляется винтами 13, На цилиндрической части регулировочного винта 12 установлены уплотнительные кольца 14 Полые стержни 5 упругих элементов размещены в единой обойме 15 так, что их съемные наконечники 9 через мембраны 16, защемленные между корпусом 1 подшипника и 17, взаимодействуют с камерами 3 подшипника скольжения. От поворота полых стержней 5 в обойме 15, предотвращающего разрыв соединительных проводов 18 датчиков 8, в обойме 15 запрессованы штифты 19, входящие в паз наружной цилиндрической поверхности корпуса. Обойма 15 винтами 20 жестко соединена с корпусом 1 подшипника. Натяг в сопряжениях коническая поверхность винта 12 - неразъемный наконечник 6 полого стержня 5 - съемный наконечник 9 - мембрана 16 - камера 3 подшипника при обратном ходе винта 12 обеспечивается пружиной 21, жестко закрепленной на торце обоймы 15 и входящей в кольцевой паз полого стержня 5 упругого элемента. Датчики 8 соединительными проводами 18 связаны с усилительно-преобразовательным блоком 22.
Деформируемая часть 7 полого стержня 5 упругого элемента выполнена в виде тонкостенной сферической поверхности радиусом, превышающим радиус цилиндрической части полого стержня 5, ограниченной с обеих сторон равноудаленными от оси торцовыми поверхностями, образующими сферическое кольцо с размерами, наприR, мер, Нд ч 2 RK и Вд ч -у-, где Рд ч и
Вдч - радиус и ширина сферической наружной поверхности деформируемой части корпуса упругого элемента; R - радиус цилиндрической (недеформируемой) части полого стержня 5 упругого элемента. При этом полый стержень 5 упругого элемента вместе с неразъемным сферическим наконечником 6 и деформируемой частью 7 изготовлены из материалов обладающих упругими свойствами.
Съемный наконечник 9 изготовлен в виде тела вращения со сферической поверхно- стью контакта из материала с низкой теплопроводностью.
Мембрана 16 изготовлена в виде тонкостенной оболочки из материала, обладающего упругими свойствами, с выпуклой вниз по отношению к камерам 3 подшипников центральной частью, облегающей сферическую поверхность контакта съемного наконечника 9, и сопряженными с ней симметричными периферийными частями противоположной выпуклости меньшего радиуса кривизны.
Упругие элементы в собранном виде с наклеенными датчиками размещаются в
обойме 15 и с помощью штифтов 19 ориентируются в ней. Пружины 21 крепятся к торцу обоймы 15 Мембраны 16 размещаются между торцами камер 3 и крышками 17. Обойма 15 в сборе размещается в кольце0 вой расточке корпуса 10 шпиндельной бабки так, что упругие элементы своими Наконечниками 9 соприкасаются с мембранами 16. Обойма жестко крепится к корпусу 1 подшипника винтами. Механизмы регули5 рования натяга размещаются в радиальных отверстиях корпуса 10 так, что регулировочные винты 12 своими коническими поверхностями взаимодействуют с наконечниками б упругих элементов. Втулки 11 винтами 13
0 жестко крепятся к корпусу 10 шпиндельной бабки. Вращением винтов 12 создается натяг в деформируемых частях 7 упругих элементов, фиксируемый по показаниям усилительно-преобразовательного блока
5 22. Во время обработки детали сила резания действует через шпиндель на гидростатический радиально-упорный подшипник, вызывая изменения давления в его торцовых и радиальных несущих карманах и, соответст0 венно, в соединенных с ними дросселирующими каналами 4 камерах 3. Изменение давления в камерах 3 вызывает деформации мембран 16, передаваемых через наконечник 9 на деформируемую часть 7 полого
5 стержня 5. Деформации части 7 воспринимаются наклеенными на ее внутреннюю поверхность датчиками 8, преобразуемыми в электрический сигнал, поступающий на вход блока 22.
0 Формула изобретения
1. Динамометрическая подшипниковая опора, содержащая корпус подшипника с несущими карманами, упругий элемент, датчик деформации упругого элемента и вы5 полненные в корпусе камеры, соединенные с несущими карманами через дросселирующие каналы, отличающаяся тем, что, с целью расширения технологических возможностей, камеры выполнены на торце
0 корпуса подшипника, а число упругих элементов равно числу несущих карманов, причем каждый упругий элемент выполнен в виде полого стержня, один конец которого выполнен сферическим и предназначен для
5 взаимодействия с введенным в опору механизмом регулирования натяга, а другой конец - в виде тонкостенной сферической оболочки с установленным на ней наконечником, предназначенным для взаимодействия с введенной в опору мембраной при
этом на внутренней поверхности оболочки расположены датчики, а мембрана установлена в камере.
2. Опора поп 1,отличающаяся
полней в виде установленного в корпусе винта с конической поверхностью, предназначенной для взаимодействия со сферическим концом упругого эле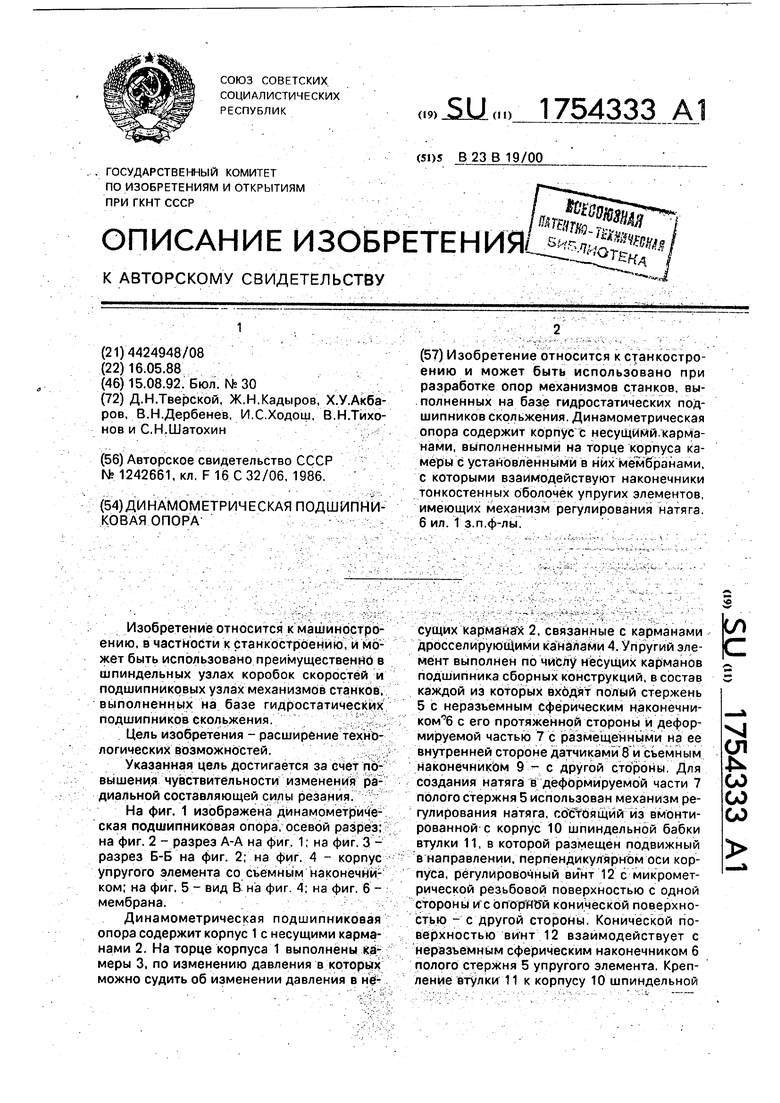
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамометрическая шпиндельная опора | 1991 |
|
SU1803272A1 |
| Опора шлифовальной бабки | 1988 |
|
SU1583270A1 |
| Шпиндельный узел | 1979 |
|
SU848146A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В.А. | 2015 |
|
RU2600953C1 |
| УНИВЕРСАЛЬНЫЙ КРУГЛОШЛИФОВАЛЬНЫЙ СТАНОК | 1992 |
|
RU2050248C1 |
| ОПОРА СКОЛЬЖЕНИЯ | 2001 |
|
RU2210684C2 |
| Динамометрическая револьверная головка | 1986 |
|
SU1414505A1 |
| Устройство для обработки тонкостенных цилиндров | 1987 |
|
SU1563843A1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| ШПИНДЕЛЬНЫЙ УЗЕЛ МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 1996 |
|
RU2116165C1 |
Изобретение относится к станкостроению и может быть использовано при разработке опор механизмов станков, выполненных на базе гидростатических подшипников скольжения. Динамометрическая опора содержит корпус с несущими карманами, выполненными на торце корпуса камеры с установленными в них мембранами, с которыми взаимодействуют наконечники тонкостенных оболочек упругих элементов, имеющих механизм регулирования натяга. 6 ил. 1 з.п.ф-лы.
тем, что механизм регулирования натяга вы- 5 мента.
75 72 Г /7 19 15 8 J JS
фиг. 7
12
Фиг.2
6-6
15 2077 1
i
K25ZZ2E32ES2
iZZZZZEZZESv
Фиг.З
8
22&2
five 4
74
вхдв
Фиг 5
фиг В
| Гидростатический подшипник | 1984 |
|
SU1242661A2 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
