Изобретение относится к машиностроению и может быть использовано при создании промышленных роторов и манипуляторов.
Целью изобретения является повышение грузоподъемности и быстроходности модуля манипулятора.
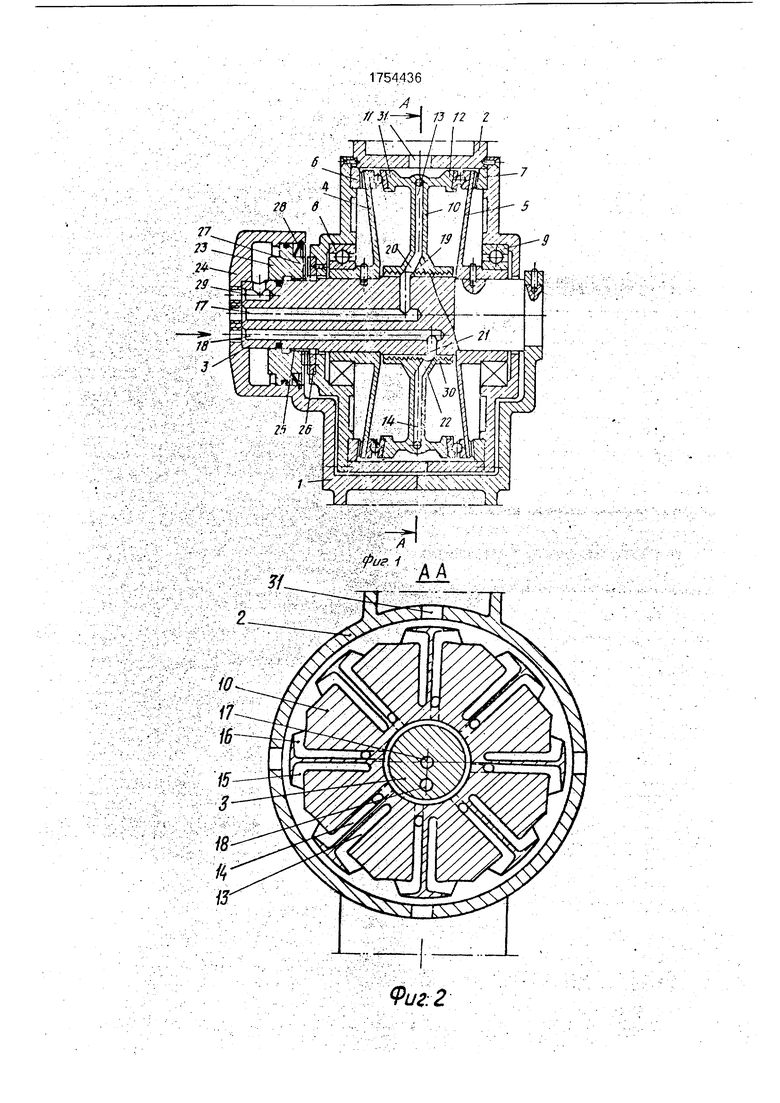
На фиг, 1 изображен модуль манипулятора, общий вид, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - модуль, вид сбоку.
Модуль манипулятора содержит ведущее 1 и ведомое 2 звенья Со звеном 1 жестко связан приводной вал 3. С валом 3 неподвижно соединены гибкие зубчатые колеса 4, 5, входящие в зацепление с жесткими зубчатыми колесами 6, 7, которые неподвижно закреплены на звене 2. Последнее связано с валом 3 посредством подшипников 8, 9 Между гибкими колесами 4, 5 на валу 3 свободно установлен ротор 10с закрепленными на нем генераторами 11, 12 волн,
Генератор 11 волн взаимодействует с гибким коническим колесом 4, а генератор 12 - с колесом 5. В роторе 10 выполнены радиальные коленчатые каналы 13 и 14, расположенные попарно, при этом выходные отверстия 15, 16 каждой пары на наружной поверхности ротора 10 противоположно направлены. В приводном валу 3 выполнены продольные каналы 17, 18 для подвода рабочей среды. Выходное отверстие 19 канала 17 сообщается с входными отверстиями 20 коленчатых каналов 13, а выходное отверстие 21 канала 18 сообщается с входными отверстиями 22 коленчатых каналов 14.
На валу 3 установлен поршень 23 цилиндра 24. Поршень 23 связан с валом 3 посредством шлицов 25. Со звеном 2 свяэаvjСЛ
Јv Јw OJ О
на полумуфта 26 с торцовыми крупнозубы- ми шлицами. На внешней торцовой поверхности поршня 23 выполнена полумуфта 27 с ответными торцовыми крупнозубыми шлицами. Поршень 23 имеет возможность через полумуфты 26,27 взаимодействовать со звеном 2.
Поршень 23 нагр ужен пружиной 28. Полость между цилиндром 24 и поршнем 23 сообщается через канал 29. выполненный в приводном валу 3, с источником подачи рабочей среды.
Для предотвращения утечки рабочей среды до подачи ее в коленчатые каналы 13, 14 между ротором 10 и валом 3 выполнено лабиринтное уплотнение 30. Для отвода отработанной рабочей среды в звене 2 выполнены каналы 31,
Модуль манипулятора работает следующим образом.
Для поворота звена 2 относительно оси вала 3 в канал 17 подается рабочая среда с некоторым избыточным давлением, поступающая в коленчатые каналы 13, при истечении на которых реактивная энергия давления рабочей среды преобразуется в механическую работу, вследствие чего получает вращение ротор 10 и связанные с ним генераторы 11, 12 волн, деформирующие гибкие колеса 4, 5, за счет зацепления с которыми получают вращение жесткие колеса 6, 7. Последние передают вращение звену 2. Отрабоотанная среда, например газ, отводится через каналы 31, выполненные в звене 2.
Для поворота звена 2 в противоположном направлении рабочая среда поступает по каналу 18 вала 3 в коленчатые каналы 14, а так как выходные отверстия 16 направлены в противоположном отверстиям 15 направлении, ротор 10 получит противоположное вращение.
Для фиксации звена 2 в требуемом положении под нагрузкой рабочая среда не
подается в каналы 17,18, а подается в канал 29, откуда она поступает в рабочую полость между поршнем 23 и цилиндром 24, вследствие чего поршень 23 получает осевое перемещение и полумуфты 26 и 27 образуют соединение, момент в котором уравновешивает момент, стремящийся повернуть ротор 10 под действием приложенной нагрузки к звену 2.
При торможении звена 2 снимается давление рабочей среды в полости между поршнем 23 и цилиндром 24, при этом поршень 23 под действием пружины 28 возвращается в исходное положение, а полумуфты
26 и 27 получают возможность свободного вращения друг относительно друга. Формула изобретения Модуль манипулятора, содержащий ведущее и ведомое звенья, приводнйо вал с
установленными на нем ротором, два генератора волн, связанных с ротором, два конических зубчатых гибких колеса, закрепленных на валуе возможностью вза4- имодействия с соответствующими генераторами волн, и два жестких зубчатых колеса, закрепленных на ведомом звене с возможностью взаимодействия С соответствующими гибкими зубчатыми колесами, отличающийся тем, что, с целью повышения
грузоподъемности и быстроходности, в роторе выполнены радиальные коленчатые каналы, расположенные в одной поперечной плоскости, в приводном валу выполнены каналы для подвода рабочей среды, а в
ведомом звене - каналы для отвода отработанной среды, при этом коленчатые каналы размещены попарно, а выходные отверстия каналов на наружной поверхности ротора в каждой паре противоположно
направлены, причем входные отверстия каналов в каждой паре выполнены с возможностью сообщения с соответствующими им выходными отверстиями каналов на валу модуля.
к
SJ
ОЭР сьЗ- ЙЭ
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1465300A1 |
| Многоскоростная волновая передача | 1985 |
|
SU1352119A1 |
| Шарнир манипулятора | 1983 |
|
SU1138270A1 |
| Волновая зубчатая передача | 1990 |
|
SU1747769A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Манипулятор | 1987 |
|
SU1509245A1 |
| Манипулятор | 1983 |
|
SU1199610A1 |
| Модуль манипулятора | 1983 |
|
SU1240580A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2146010C1 |
| Модуль манипулятора | 1986 |
|
SU1360979A1 |
Использование: машиностроение, в частности модули промышленных роботов и манипуляторов. Сущность изобретения: в роторе 10 выполнены коленчатые каналы 13 и 14, в приводному валу 3 - продольные каналы 17 и 18, а в ведомом звене - каналы 31. Каналы 13 и 14 расположены попарное радиальном направлении в поперечной плоскости ротора 10, а выходные отверстия каждой пары направлены в противоположные стороны. При подаче рабочей среды в канал 17 вала 3 ротор 10 вращается в одном направлении, так как выходное отверстие 19 канала 17 сообщается с входными отверстиями 20 каналов 13. При подаче рабочей среды в канал 18 ротор вращается в противоположном направлении, так как выходное отверстие 21 канала 18 сообщается с входными отверстиями 22 каналов 14. 3 ил.
ФигЗ.
| Павлов Б.И, Механизмы приборов и систем управления | |||
| Л.: Машиностроение, 1972, с | |||
| Прялка для изготовления крученой нити | 1920 |
|
SU112A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
