Изобретение относится к машиностроению и может быть использовано в робототехнике, например в кистевых шарнирах и схватах манипуляторов.
Целью изобретения является уменьшение габаритов.
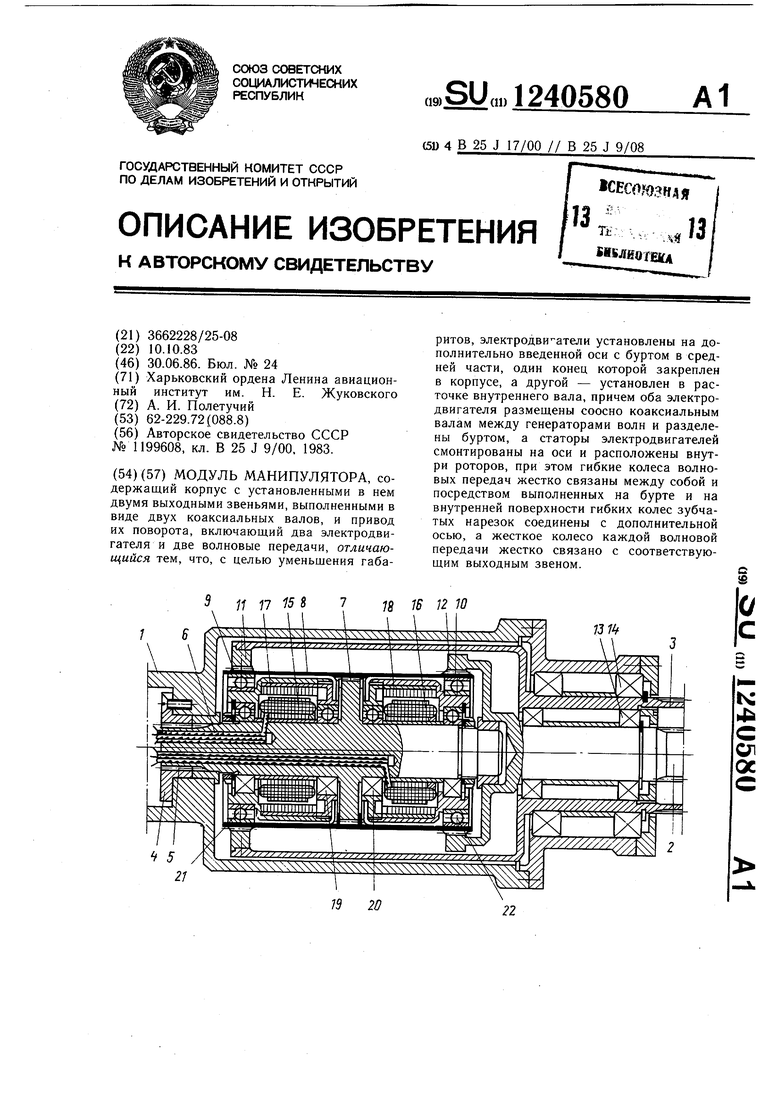
На чертеже изображен модуль манипулятора, продольный разрез.
Модуль манипулятора содержит корпус 1 и выходные звенЬ 2 и 3. С корпусом 1 посредством переходника 4 шлицами 5 соединена ось 6, содержащая в средней части бурт, связанный зубчатым соединением 7 с гибким колесом 8. На краях гибкого колеса 8 выполнены зубчатые венцы 9 и 10, с которыми зацепляются соответственно жесткие зубчатые колеса 11 и 12. Жесткое зубчатое колесо 11 связано с выходным звеном 3, а жесткое зубчатое колесо 12 - с выходным звеном 2. Выходные звенья 2 и 3 установлены коаксиально друг другу и через подшипниковые опоры 13 и 14 опираются на торец корпуса 1.
На оси статора смонтированы статоры 15 и 16, расположенные соответственно внутри роторов 17 и 18 электродвигателей. Роторы 17 и 18 смонтированы на подшипниковых опорах 19 и 20, установленных на
оси 6. На роторах 17 и 18 соответственно закреплены генераторы 21 и 22 волн, взаимодействуюш,ие с гибким колесом 8 в районе зубчатых венцов 9 и 10. Для обеспечения лучшей центровки ось б одним концом установлена в расточке выходного звена 2.
Модуль манипулятора работает следую- ш,им образом.
При подводе напряжения к статорам 15 и 16 начинают враш,аться роторы 17 и 18, а вместе с ними и генераторы 21 и 22 волн. Каждый генератор волн деформирует свой зубчатый венец гибкого колеса 8, которое неподвижно, так как связано через зубчатое соединение 7 и ось 6 с корпусом 1. Вследствие деформирования зубчатых венцов 9 и 10 гибкого колеса 8 и их зацепления соответственно с жесткими колесами 11 и 12 последние получают вращение и сообщают его выходным звеньям 2 и 3.
Напряжение может быть подано на два статора 15 и 16 одновременно или только на один из них. В зависимости от этого вращение получают оба выходных звена 2 и 3 или только одно из них. Выходные звенья 2 и 3 могут также вращаться с разной угловой скоростью в одном и противоположном направлениях.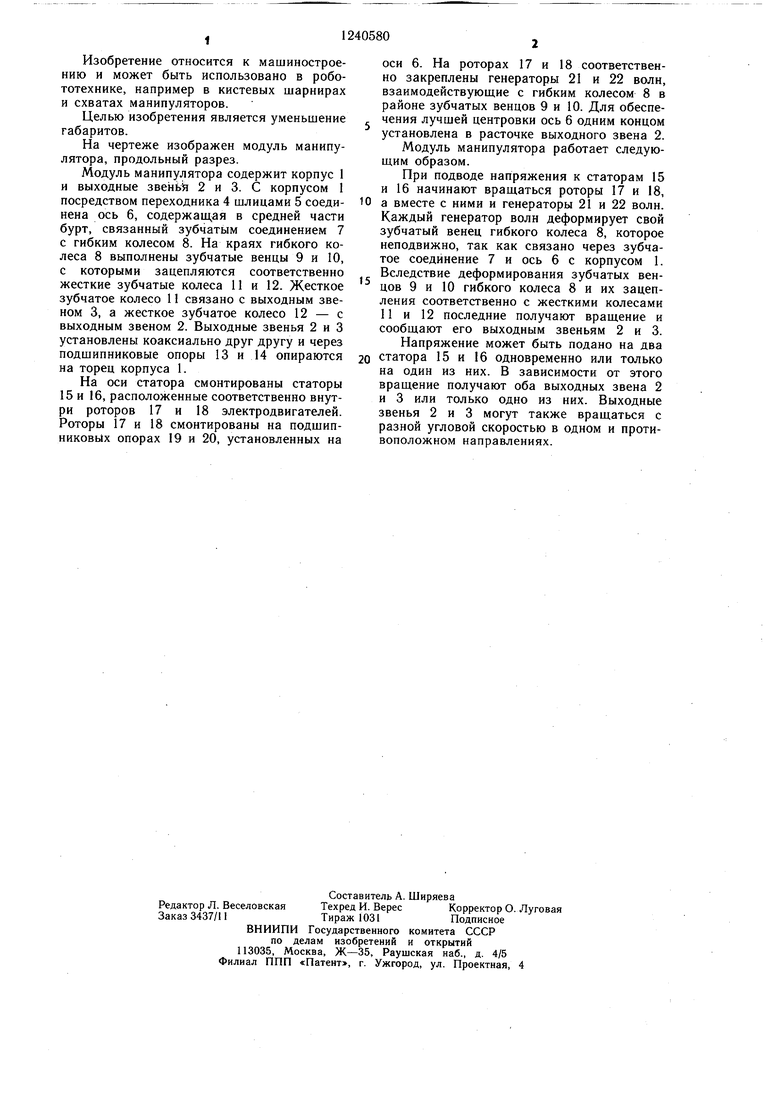
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир для соединения звеньев манипулятора | 1980 |
|
SU882736A1 |
| Шарнир соединения звеньев манипулятора | 1981 |
|
SU1013269A1 |
| Шарнир соединения звеньев манипулятора | 1981 |
|
SU1135643A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Шарнир манипулятора | 1988 |
|
SU1535717A1 |
| Манипулятор | 1987 |
|
SU1509245A1 |
| Модуль манипулятора | 1986 |
|
SU1360979A1 |
| Модуль манипулятора | 1985 |
|
SU1321584A1 |
| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| Рука манипулятора /ее варианты/ | 1983 |
|
SU1199608A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
