Изобретение предназначено для управления захватом,транспортированием и ориентацией в пространстве материальных тел разного веса и может быть использовано в автоматических и дистанционно-управляе- мых манипуляторах в машиностроении и приборостроении.
Известны устройства позволяющие автоматически корректировать усилие сжатия губок схвата в зависимости от веса обьекта манипулирования и осуществлять транспортирование и ориентацию в пространстве материальных тел.
Однако такие устройства имеют слишком сложную и недостаточно надежную конструкцию.
Наиболее близким к изобретению является устройство для управления схватом ма- нипулятора. При эксплуатации этого устройства усилие сжатия автоматически корректируется так, чтобы оно было минимально необходимым для удержания обьекта. Затем осуществляется транспортирование. Конструктивно это обеспечивается за счет того, что устройство содержит генератор импульсов, установленные на губках схвата тактильный датчик и индикатор проскальзывания, кинематически связанные с датчиком импульсов. Выход последнего соединен через последовательно подключенные первый элемент И и первый элемент ИЛИ с первым входом первого электронного коммутатора, подключенного выходами к соответствующим вхоДам первого привода, который кинематически связан с губками схвата. Устройство содержит первый вход (управление разжатием губок схвата), соединенный через второй элемент И с вторым входом первого электронного коммутатора. Второй вход (управление сжатием губок схвата) устройства через последовательно установленные третий элемент И и четвертый элемент И подключен к второму входу первого элемента ИЛИ, а выход тактильного
(/
С
ч ел
4
4 СО Ю
датчика соединен с вторым входом первого элемента И и через элемент НЕ с вторым входом четвертого элемента VI.
Индикатор проскальзывания состоит из подпружиненных роликов, охваченных бесконечной гибкой лентой и кинематически связан с датчиком импульсов. Последний может быть выполнен, например, в виде диска с отверстиями и фотоэлектрического считывающего элемента.
Привод состоит из шагового электродвигателя и усилителя мощности.
Электронный коммутатор - стандартный.
Работает схват-прототип следующим образом.
При подаче единичного сигнала на второй вход устройства (управление сжатием губок схвата) импульсы от генератора через третий и четвертый --элемент И и первый элемент ИЛИ поступают на вход первого электронного коммутатора, затем на первый привод. Происходит сжатие схвата. При соприкосновении губок схвата с объектом захвата на выходе тактильного датчика появляется единичный сигнал, который инвертируется, после чего поступает на второй вход четвертого элемента И, что препятствует дальнейшему прохождению импульсов от генератора к первому электронному коммутатору. Сжатие схвата прекращается.
Затем происходит подъем схвата. Если при этом усилие сжатия схвата недостаточно для удержания объекта захвата, то происходит проскальзывание последнего относительно губок схвата. При проскальзывании датчик импульсов выдает сигналы, которые через первый элемент И, первый элемент ИЛИ, первый электронный коммутатор поступают на первый привод, происходит поджатие губок схвата. Это поджатие будот происходить до тех пор, пока не прекратиться проскальзывание объекта захвата относительно губок схвата.
После транспортирования схвата в заданную точку пространства производится подача единичного сигнала на первый вход устройства (управление разжатием губок) и губки схвата разжимаются.
Преимуществом данного схвата является то, что он обладает высокой надежностью и обеспечивает-минимальное необходимое усилие для удержания объекта захвата.
Недостаток - низкая точность манипулирования. Снижение точности манипулирования происходит потому, что положение объекта захвата относительно губок схвата является неопределенным. Неопределенность положения возникает из-за проскаль- зывания объекта (а насколько
проскальзывает неизвестно) относительно губок схвата. В результате положение объекта относительно губок схвата и базовых координат манипулятора точно не определено, что ограничивает точное манипулирование этим объектом (например, при сборке и т.п.).
Цель изобретения - повышение точности манипулирования.
0 Цель достигается тем, что устройство дополнительно снабжено пятым, шестым, седьмым, восьмым и девятым элементами И, вторым и третьим элементами ИЛИ, делителем частоты, вторым электронным ком5 мутатором, вторым приводом, триггером, реверсивным счетчиком и блоком синхронизации.
Дополнительные элементы позволяют манипулятору при работе осуществить ком0 пенсацию проскальзывания объекта захвата относительно губок схвата за счет дополнительного подъема схвата на величину проскальзывания.
Частота генератора импульсов в пред5 лагаемом устройстве в 2-6 раз больше, чем у прототипа. Делитель частоты уменьшает частоту в такое же число раз. Делитель частоты может быть выполнен с использованием триггеров. (Работоспособность схемы
0 обеспечивается при условии, что частота генератора выше, чем максимальная частота импульсов датчика импульсов,).
Подключение дополнительных элементов осуществлено следующим образом. По5 следовательно соединены пятый элемент И, блок синхронизации, второй электронный коммутатор и второй привод. Последовательно подключены к выходу генератора импульсов делитель частоты, шестой элемент
0 И и третий элемент ИЛИ, выход которого соединен с другим входом второго эле кт- ронного коммутатора. Последовательно подключен триггер, седьмой элемент И, восьмой элемент И и реверсивный счетчик.
5 Также последовательно подключены девятый элемент И и блок синхронизации, второй вход которого подключен к входу делителя и выходу генератора импульсов, третий вход- к выходу пятого элемента И, а
0 выход к второму входу второго электронного коммутатора, соединенного выходами с соответствующими входами второго привода, выход делителя частоты подключен к второму входу второго, третьего и восьмого
5 элементов И и первому входу шестого и пятого элементов И, втор ой вход последнего соединен с третьим входом устройства (управление подъемом схвата) и первым входом триггера и девятого элемента И, подключенного вторым входом к выходу
первого элемента ИЛИ, а выходом к второму (суммирующему) входу реверсивного счетчика, выходы которого соединены с соответствующими входами второго элемента ИЛИ, четвертый вход устройства (управление опусканием схвата) подключен к второму входу шестого элемента И и триггера, а второй вход седьмого элемента И соединен с первым входом устройства.
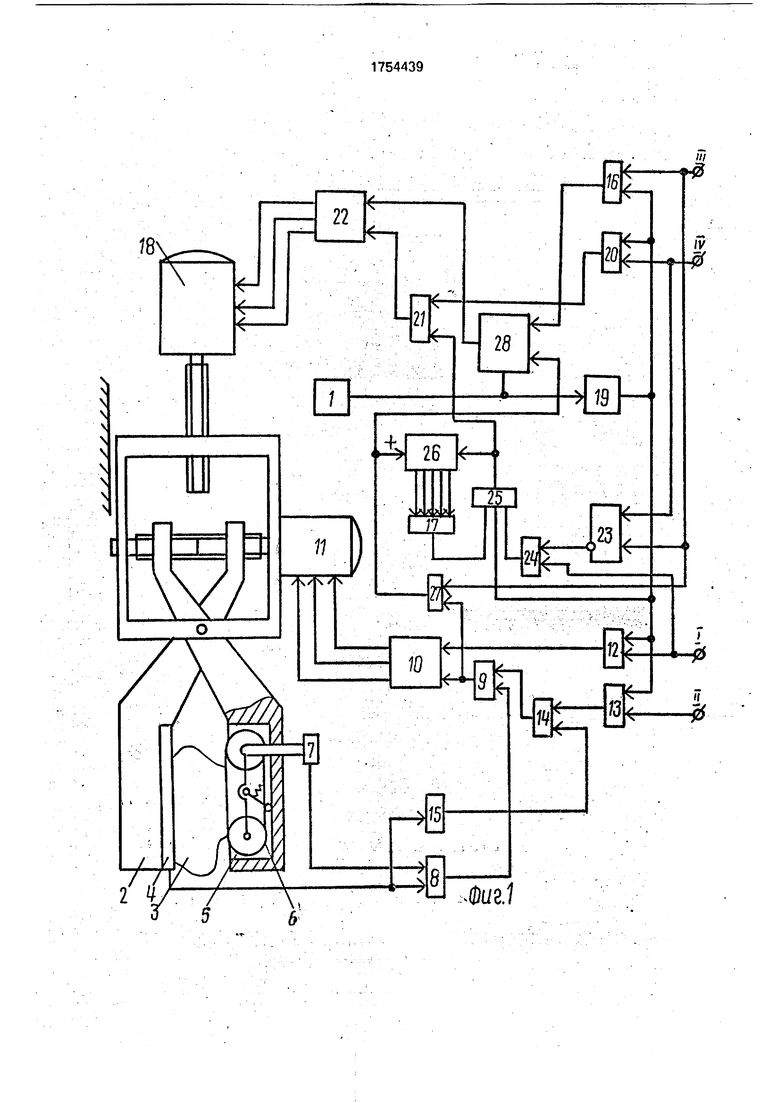
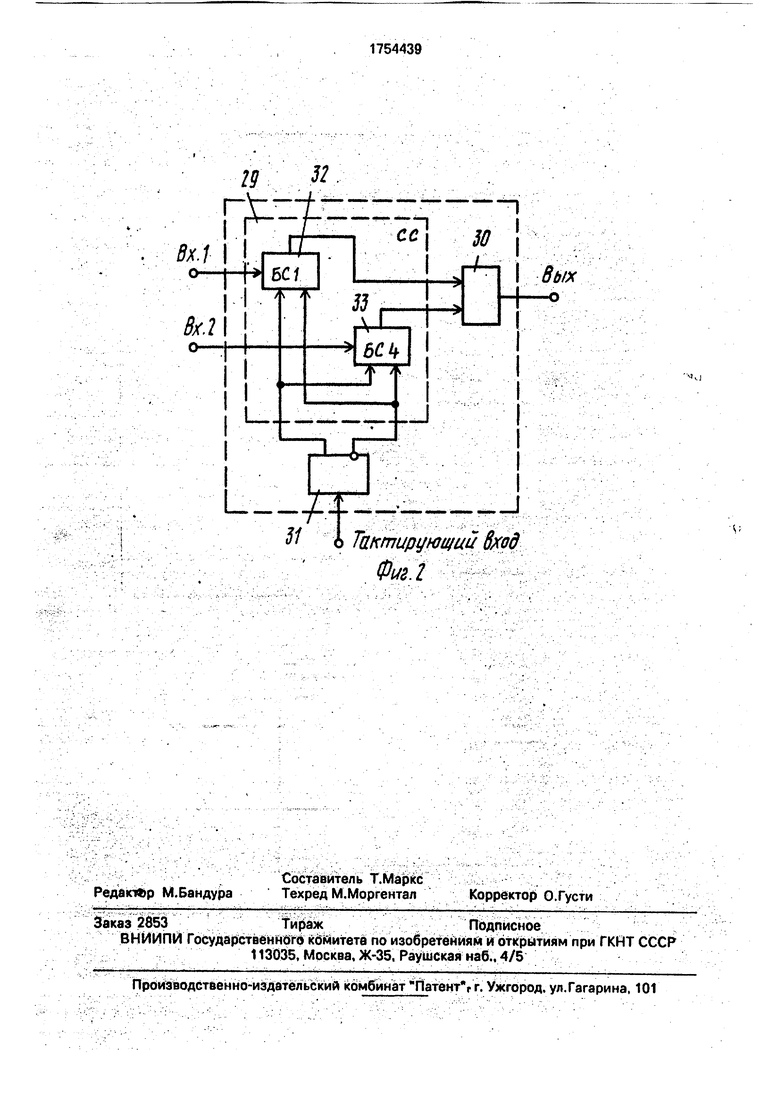
На фиг.1 показана схема предлагаемого устройства; на фиг.2 - возможная схема блока синхронизации.
Устройство содержит генератор импульсов 1, губки 2 схвата и обьектЗ манипулирования, тактильный датчик А, индикатор проскальзывания, состоящий из подпружиненных роликов 5, охваченных бесконечной гибкой лентой, датчик 7 импульсов, первый 8 элемент И, первый 9 элемент ИЛИ, первый электронный коммутатор 10, первый привод 11, состоящий из шагового электродвигателя и усилителя мощности, второй 12, третий 13 и четвертый 14 элементы И, элемент 15 НЕ, пятый 16 элемент И, второй 17 элемент ИЛИ, второй привод 18, делитель 19 частоты, шестой 20 элемент И, третий 21 элемент ИЛИ, второй электронный коммутатор 22, триггер 23, седьмой 24, восьмой 25 элементы И, реверсивный счетчик 26, девятый 27 элемент И, и блок синхронизации 28.
На схеме обозначено: I - первый вход, управляющий разжимом схвата; II - второй вход, управляющий сжатием схвата; III - третий вход, управляющий подъемом схвата; IV - четвертый вход, управляющий опусканием схвата.
Блоки 28 синхронизации известны. Например, блок синхронизации (фпг.2) содержит схему 29 синхронизации (СС), элемент 30 ИЛИ и триггер 31 со счетным входом. Схема 29 синхронизации состоит из блока 32 БС1 и блока 33 БС4. На входы блока синхронизации поступают сигналы: Вх.1 -с датчика 7 импульсов через элементы 8, 9 и 27; Вх.2 - непосредственно с генератора 1 импульсов; Вх.З - с генератора 1 импульсов через делитель 19 частоты и элемент 16.
В исходнбм состоянии устройства сигналы на выходах тактильного датчика 4 и датчика 7 импульсов отсутствуют. Генератор 1 работает, но на I (первом), II (втором), III (третьем) и IV (четвертом) входах устройства нулевые сигналы, т.е. первый 11 и второй 18 приводы выключены. Единичный сигнал с выхода элемента 15 НЕ поступает на второй вход четвертого 14 элемента И. На выходах реверсивного счетчика 26 нулевые сигналы, на выходе триггера 23 нулевой
сигнал. Используемые в предлагаемом устройстве элементы общеизвестны.
Схват работает следующим образом. Для сжатия губок схвата на II (второй)
вход устройства подается единичный сигнал. При этом импульсы с генератора 1 через делитель 19 частоты, третий 13 и четвертый 14 элементы И и первый 9 элемент ИЛИ поступают на первый 10 элект0 ройный коммутатор. Первый привод 11 включается и губки 2 схвата начинают сходиться. При сжатии объекта 3 с силой, достаточной для срабатывания тактильного датчика 4, последний выдает единичный
5 сигнал, который, проходя через элемент 15 НЕ, инвертируется и на одном из входов четвертого 14 элемента И появляется нулевой сигнал. Это препятствует прохождению импульсов с генератора 1 к первому элект0 рониому коммутатор 10. Таким образом, происходит отключение первого 11 привода от генератора 1 импульсов.
При подаче единичного сигнала на II (второй) вход устройства (подъем) импульсы
5 от генератора 1 через делитель 19 частоты, пятый 16 элемент И, блок 28 синхронизации второй 22 электронный коммутатор поступят на второй 18 привод. Начнется подъем схвата. Если при этом объект 3 начнет вы0 скальзывать из схпата, то ролики 5, охваченные лентой б, начнут проворачиваться. При этом на выходе датчика 7 появятся импульсы, которые через первый 8 элемент И и первый 9 элемент ИЛИ и первый 10 элект5 ронный коммутатор поступят на первый 11 привод. Происходит поджэтие губок, которое закончится с прекращением проскаль-1- зывания объекта 3 относительно губок охвата.,
0Кроме того, импульсы от датчика 7, возникающие при проскальзывании объекта 3 относительно губок схвата, через первый 8 элемент И, первый 9 элемент ИЛИ, девятый 27 элемент И поступают на суммирующий
5 вход реверсивного счетчика 26, а также на вход блока 28 синхронизации и далее через второй 22 электронный коммутатор на второй привод 18, т.е. при проскальзывании объекта 3 захвата относительно губок схва0 та происходит дополнительный подъем схвата на величину проскальзывания. Для выполнения этого необходимо шаг винтовой передачи (или соответствующий параметр другой передачи) механисма подъема
5 схвата (см. фиг. 1) выбирать в зависимости от дискретности датчика 7 или наоборот.
В результате дополнительного подъема схвата при проскальзывании положение объекта 3 захвата относительно основных координатных осей манипулятора не изменяется. Это обеспечивает более высокую точность манипулирования по сравнению с устройством-п рототи пом.
Для опускания схвата единичный сигнал подается на IV (четвертый) вход устройства.
В этом случае импульсы от генератора 1 через делитель 19 частоты, шестой 20 элемент И, третий 21 элемент ИЛИ, второй 22 электронный коммутатор поступят на второй привод 18. Кроме того, единичный сигнал с IV (четвертого) входа поступит на триггер 23 и на его выходе установится единичный сигнал.
Для разжатия схвата единичный сигнал подают на I (первый) вход устройства. Тогда импульсы от генератора 1 через делитель 19 частоты, второй 9 элемент И, первый 10 электронный коммутатор поступят на первый привод 11. Кроме того, единичный сигнал с I (первого) входа устройства поступит на вход седьмого 24 элемента И и на его выходе установится единичный сигнал. В результате на все три входа восьмого 25 элемента И поступят единичные сигналы и этот элемент будет пропускать импульсы, поступающие от делителя 19 частоты на вычитающий вход реверсивного счетчика 26 и через третий 21 элемент ИЛИ, второй 22 электронный коммутатор на второй привод 18. Начнется дополнительное опускание схвата. Это опускание будет протекать до тех пор, пока на выходах реверсивного счетчика 26 будет хоть один единичный сигнал. Когда на всех выходах счетчика 26 будут нулевые сигналы, то на выходе второй схемы ИЛИ 17 тоже будет нулевой сигнал, который будет препятствовать прохождению импульсов от генератора 1 к второму приводу 18 и дополнительное опускание схвата прекратится.
В результате при разжиме схвата произойдет его дополнительное опускание на такую же величину, на какую осуществлялся дополнительный подъем. Подключение другого входа триггера 23 к III (третьему) входу (подъем) устройства обеспечивает возвращение триггера 23 в исходное состояние.
Сравнение предлагаемого устройства с базовым (он же прототип) показало, что точность манипулирования повышается в 6-20 раЖ
Использование предлагаемого устройства позволит отказаться от специальных систем коррекции, что даёт экономию не менее 15% от стоимости манипулятора.
Формула изобретения Устройство для управления схватом ма нипулятора, содержащее генератор импуль сов, установленные на губках схвати
тактильный датчик и индикатор проскальзывания, кинематически связанный с датчиком импульсов, выход которого соединен через последовательно подключенные первый элемент И и первый элемент ИЛИ с
первым входом первого электронного коммутатора, подключенного выходами к соответствующим входам первого привода, кинематически связанного с губками схвата, первый вход устройства через второй
элемент И соединен с вторым входом первого электронного коммутатора, второй вход устройства через последовательно подключенные третий элемент И и четвертый элемент И подключен к второму входу
первого элемента ИЛ И, а выход тактильного датчика соединен с вторым входом первого элемента И и через элемент НЕ - с вторым входом четвертого элемента И, о т л и ч a tout e e с я тем, что, с целью повышения
точности устройства, оно содержит пятый элемент И, второй элемент ИЛИ, второй привод и последовательно соединенные делитель частоты, шестой элемент И, третий элемент ИЛИ и второй электронный коммутатор, последовательно подключенные триггер, седьмой элемент И, восьмой элемент И и реверсивный счетчик, а также последовательно соединенные девятый элемент И и блок синхронизации, второй
вход которого подключен к входу делителя и выходу генератора импульсов, третий вход - к выходу пятого элемента И, а выход - к второму входу второго электронного коммутатора, соединенного выходами с соответ ствующими входами второго привода, выход делителя частоты подключен к вторым входам второго, третьего и восьмого элементов И и первому входу пятого элемента И, второй вход которого соединен с
третьим входом устройства и первыми входами триггера и девятого элемента И. подключенного вторым входом к выходу первого элемента ИЛИ, а выходом - к второму входу реверсивного счетчика, выходы
которого соединены с соответствующими входами второго элемента ИЛИ, подключенного выходом к третьему входу восьмого элемента И, выход которого соединен с входом третьего элемента ИЛИ, четвертый вход
устройства подключен к вторым входам шестого элемента И и триггера, а второй вход седьмого элемента И соединен с первым входом устройства.
19 


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным роботом | 1988 |
|
SU1541556A2 |
| Устройство для управления схватом манипулятора | 1987 |
|
SU1493459A1 |
| Устройство для управления адаптивным роботом | 1976 |
|
SU704774A1 |
| СИСТЕМА МОНИТОРИНГА ЖИМА ЛЕЖА В ПАУЭРЛИФТИНГЕ | 2011 |
|
RU2489177C2 |
| Устройство для адаптации робота к весу захватываемых деталей | 1986 |
|
SU1395436A1 |
| Устройство для управления адаптивным роботом | 1984 |
|
SU1188700A1 |
| Устройство для управления технологическим объектом | 1985 |
|
SU1275377A1 |
| Электронные цифровые весы | 1987 |
|
SU1597591A1 |
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU457970A1 |
| Устройство для кодирования сигналов частотных датчиков | 1985 |
|
SU1336246A1 |
Использование: изобретение относится к робототехнике и может быть использовано при создании дистанционно-управлязмых манипуляторов. Сущность изобретения: устройство содержит генератор импульсов, тактильный датчик, индикатор проскальзывания, электронные коммутаторы, приводы, реверсивный счетчик, делитель частоты, триггер, элемент НЕ, элементы И и ИЛИ. 2 ил.
31
Т
I.ЈTIl.
Тактирующ Фиг. 2
I I
I Вь/х
I
Тактирующий Sxod Фиг. 2
| Устройство для управления схватом манипулятора | 1987 |
|
SU1493459A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
