«ИЛИ, причем единичный выход младшего разряда регистра сдвига связан с входами первой схемы «НЕ, реверсивного счетчика и одним из входов первой схемы «И, выход которой соединен с единичным входом первого триггера и одним из входов первой схемы «ИЛИ, выход которой подключен через первый электронный коммутатор к входу исполнительного двигателя механизма поперечного перемещения, выход первого триггера присоединен к первому входу, а выход первой схемы «НЕ - ко второму входу второй схемы «И, выход которой связан с вторым входом первой схемы «ИЛИ, выходы фотодатчиков линейки подключены к соответствующим входам второй схемы «ИЛИ, выход которой соединен с единичным входом второго триггера и через вторую схему «НЕ связан с первым входом третьей схемы «И, выход которой подключен к сдвигающему входу регистра сдвига, единичный выход второго триггера соединен с одним из входов четвертой схемы «И, выход которой через двоичный счетчик связан с первым входом пятой схемы «И, ее выход подключен к входу реверсивного счетчика, выход которого через расширитель импульсов связан с первым входом шестой схемы «И, выход которой через электронный коммутатор соединен с входом исполнительного двигателя механизма вертикального перемещения схват-а, выход основной частоты генератора тактовых импульсов подключен к третьему входу второй схемы «И и вторым входом третьей, четвертой и шестой схем «И, выход половинной частоты генератора тактовых импульсов соединен со вторым входом первой схемы «И, выход двойной частоты генератора тактовых импульсов связан со вторым входом пятой схемы «И.
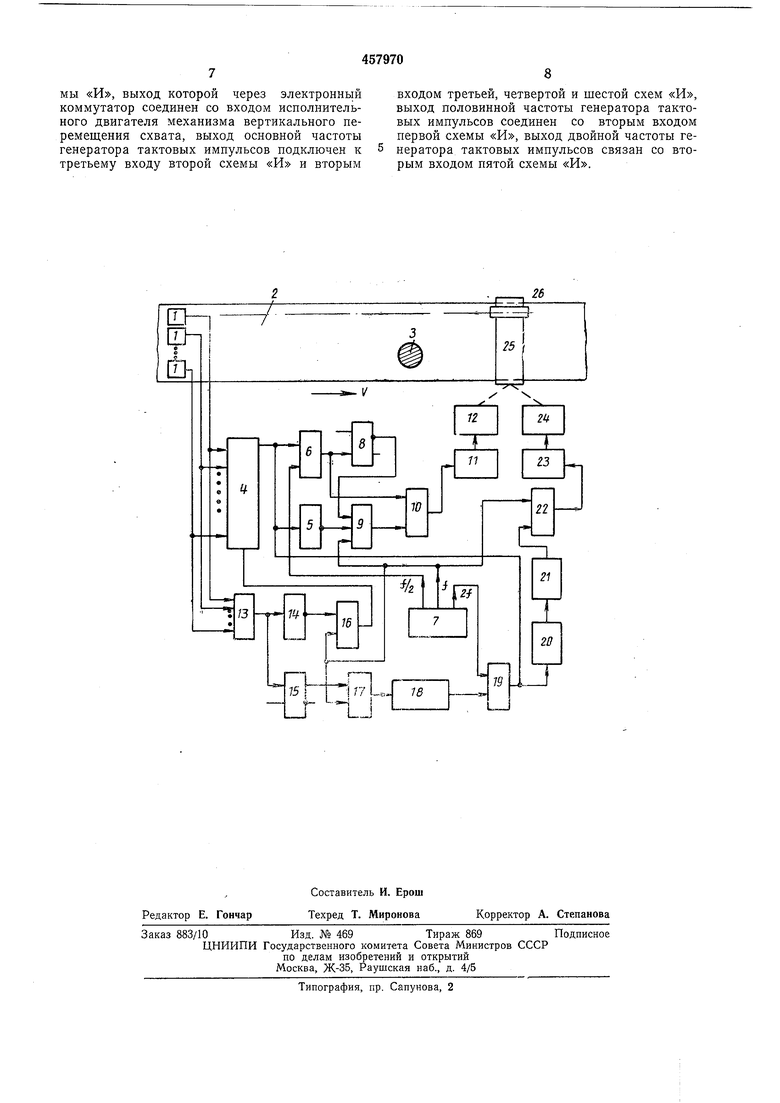
На чертеже изображено устройство управления роботом-манипулятором.
Фотодатчики 1 располагаются над конвейером 2, по которому двигаются круглые изделия 3. Каждый фотодатчик соединен с соответствующим входом регистра сдвига 4. Единичный выход младшего разряда регистра сдвига соединен с первой схемой «НЕ бис одним из входов первой схемы «И 6, второй вход которой соединен с выходом половинной частоты генератора тактовых импульсов (ГТИ) 7, а выход - с единичным входом первого триггера 8. Нулевой выход первого триггера подключен к одному из входов второй схемы «И 9, второй вход которой подключен к первой схеме «НЕ 5, а третий вход - к выходу основной частоты ГТИ. Выход второй схемы «И 9 подключен к одному из входов первой схемы «ИЛИ 10, второй вход которой подключен к выходу первой схемы «И 6. Выход первой схемы «ИЛИ 10 подключен к электронному коммутатору 11, выход которого подключен к управляющим обмоткам исполнительного двигателя 12 (например, шагового электродвигателя) поперечного перемещения схвата манипулятора. Фотодатчики 1 соединены также с соответствующими входами второй схемы «ИЛИ 13, выход которой соединен со второй схемой «НЕ 14 и с единичным входом второго триггера 15. Выход второй схемы ° «НЕ 14 подключен к одному из входов третьей схемы «И 16, второй вход которой подключен к выходу основной частоты ГТИ, а выход- к сдвигающему входу регистра сдвига 4. Единичный выход второго триггера 15 подключен к одному из входов четвертой схемы «И 17, второй вход которой подключен к выходу основной частоты ГТИ, а выход - к входу двоичного счетчика пути 18. Выход счетчика 18 подключен к одному из входов пятой схемы «И 19, второй вход которой подключен к выходу двоичной частоты ГТИ, а выход - к входу реверсивного счетчика диаметра 20. Кроме того, вход счетчика диаметра 20 соединен с выходом младшего разряда регистра
сдвига 4. Выход старшего разряда реверсивного счетчика диаметра 20 соединен с расширителем импульса 21, выход которого подключен к одному из входов шестой схемы «И 22. Второй вход шестой схемы «И 22 подключен
5 к выходу основной частоты ГТИ, а выход - к электронному коммутатору 23. Выход последнего соединен с управляющей обмоткой исполнительного двигателя 24 вертикального перемещения схвата манипулятора. Двухсте0 пенной робот-манипулятор 25 со схватом 26 располагается над конвейером 2 в требуемом месте на некотором расстоянии от фотодатчиков 1. Устройство работает следующим образом.
5 Линейка фотодатчиков 1 располагается над конвейером 2 перпендикулярно его движению. Число фотодатчиков и расстояние между ними определяется щириной ленты конвейера и требуемой точностью определения местоположе0 ния изделия на конвейере.
Нроследим управление поперечным перемещением схвата. В исходном состоянии схват манипулятора находится напротив крайнего фотодатчика. Двигаясь по конвейеру, изделие
5 подходит к линейке фотодатчиков 1. Те из фотодатчиков, под которыми оно оказывается, срабатывают, и в соответствующие разряды регистра сдвига 4 записывается «1. Число разрядов регистра сдвига 4 равно числу фото0 да чиков 1. В момент прохождения центра изделия под линейкой фотодатчиков число «единиц, записанных в соответствующих разрядах регистра сдвига 4, станет максимальным и будет соответствовать диаметру изде5 ЛИЯ и его местоположению на конвейере. После прохождения изделия под фотодатчиками производится сдвиг информации в регистре сдвига 4 в Сторону младших разрядов (онределение момента начала сдвига будет рассмотрено ниже). Пока в младщем разряде «О первая схема «И 6 будет закрыта, а вторая схема «И 9 через первую схему «НЕ 5 и нулевой выход первого триггера 8 будет открыта для прохождения импульсов с выхода основной частоты ГТИ. При этом сдвигу информации на один разряд в регистре сдвига 4 соответствует один импульс с ГТИ. Импульсы ГТИ через вторую схему «И 9 и первую схему «ИЛИ 10 поступают на электронный коммутатор 11, управляющий исполнительным двигателем 12 поперечного перемещения схвата. Одному импульсу ГТИ соответствует перемещение схвата 26 на расстояние, равное промежутку между фотодатчиками. Как только в младшем разряде регистра сдвига 4 появляются «1, вторая схема «И 9 закрывается через первую схему «НЕ 5, а первая схема «И 6 открывается. Через нее на первую схему «ИЛИ 10 и далее на электронный коммутатор 11 поступают импульсы вдвое меньшей частоты с выхода ГТИ. Теперь уже одному импульсу, поступающему на коммутатор 11, соответствует сдвиг информации в регистре сдвига 4 два разряда. За время считывания всех «1, число которых соответствует диаметру, манипулятор пройдет путь, равный половине диаметра изделия. Первая же «I с выхода первой схемы «И 6 переводит первый триггер 8 в единичное состояние. Ири этом вторая схема «И 9 закрывается по третьему входу и, когда в младшем разряде регистра сдвига опять появится «нуль, схват манипулятора двигаться уже не будет. Таким образом, регистр сдвига запоминает диаметр и местоположение круглого изделия на конвейере, а схват манипулятора перемещается в соответствии с содержимым младшего разряда регистра сдвига; если в нем записан «О, то схват перемещается на расстояние, равное расстоянию между фотодатчиками, а если «1 - на половину этого расстояния, т. е. схват манипулятора выходит в точку, соответствующую поперечной координате центра изделия. Определение второй (продольной) координаты в предлагаемом устройстве сводится к определению момента взятия изделия. Осуществляется это следующим образом. Как только изделие попадает в зону чувствительности фотодатчиков, на выходе второй схемы «И 13 появляется «1, которая переводит второй триггер 15 в единичное состояние. Четвертая схема «И 17 открывается, а третья схема «И 16 закрывается, предотвращая сдвиг информации в регистре сдвига 4. Через четвертую схему «И 17 импульсы ГТИ основной частоты начинают поступать на счетчик пути 18, который имеет коэффициент пересчета, соответствующий расстоянию от фотодатчиков до манипулятора, т. е. «1 на выходе этого счетчика появится в тот момент, когда край изделия подойдет к манипулятору. Как только изделие выйдет из зоны чувствительности фотодатчиков 1, на выходе второй схемы «ИЛИ
13окажется «О. Через вторую схему «НЕ
14откроется третья схема «И 16, и импульсы ГТИ основной частоты пройдут наСдвигающий вход регистра сдвига 4. В процессе сдвига импульсы с младшего разряда регистра сдвига поступают на вход реверсивного счетчика диаметра 20, где информация о диаметре изделия хранится до момента появления «1 на выходе счетчика пути 18. В этот момент осуществляется реверс счетчика диаметра 20, открывается лягая схема «И 19, и импульсы двойной частоты, поступающие с ГТИ, начинают списывать содержимое счетчика диаметра 20. Таким образом, счетчик обнулится в момент, когда центр изделия окажется точно под схватом манипулятора. Импульс с выхода диаметра 20 является сигналом для взятия изделия. Он поступает на расширитель импульсов 21. Расщиренный импульс подается на шестую схему «И 22 и его длительность определяет число импульсов, которые поступят на электронный коммутатор 23 и далее - на исполнительный двигатель 24 вертикального перемещения схвата 26. Изменяя длительность этого импульса, можно изменить высоту опускания схвата манипулятора в зависимости от высоты изделий, перемещаемых конвейером.
Предмет изобретения
Устройство для управления роботом-манипулятором технологического конвейера, содержащее управляемые исполнительные двигатели механизмов поперечного и вертикального перемещения схвата, отличающееся тем, что, с целью упрощения устройства и расширения его функциональных возможностей, оно содержит линейку фотодатчиков, расположенную над конвейером, регистр сдвига, каждый разряд которого соединен с соответствующим фотодатчиком линейки, два электронных коммутатора, генератор тактовых импульсов, двоичный и реверсивные счетчики, расширитель импульсов, шесть логических схем «И, две схемы «НЕ, два триггера и две схемы «ИЛИ, причем единичный выход младшего
разряда регистра сдвига связан со входами первой схемы «НЕ, реверсивного счетчика и одним из входов первой схемы «И, выход которой соединен с единичным входом первого триггера и одним из входов первой схемы
«ИЛИ, выход которой подключен через первый электронный коммутатор ко входу исполнительного двигателя механизма поперечного перемещения, выход первого триггера присоединен к первому входу, а выход первой схемы «НЕ - ко второму входу второй схемы «И, выход которой связан с вторым входом первой схемы «ИЛИ, выходы фотодатчиков линейки подключены к соответствующим входам второй схемы «ИЛИ, выход которой соединен с единичным входом второго триггера и через вторую схему «НЕ связан с первым входом третьей схемы «И, выход которой подключен к сдвигающему входу регистра сдвига, единичный выход второго триггера соединен с одним из входов четвертой схемы «И, выход которой через двоичный счетчик связан с первым входом пятой схемы «И, ее выход подключен к входу реверсивного счетчика, выход которого через расширитель импульсов связан с первым входом шестой схемы «И, выход которой через электронный коммутатор соединен со входом исполнительного двигателя механизма вертикального перемещения схвата, выход основной частоты генератора тактовых импульсов подключен к третьему входу второй схемы «И и вторым
входом третьей, четвертой и шестой схем «И, выход половинной частоты генератора тактовых импульсов соединен со вторым входом первой схемы «И, выход двойной частоты генератора тактовых импульсов связан со вторым входом пятой схемы «И.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления роботомманипулятором технологического конвейера | 1973 |
|
SU477394A1 |
| Устройство определения центров круглых предметов для систем управления роботом-манипулятором технологического конвейера | 1973 |
|
SU455322A1 |
| Устройство для определения центров круглых предметов | 1983 |
|
SU1095135A1 |
| Устройство для ориентации изделий | 1988 |
|
SU1585020A1 |
| Устройство для определения времени фибринолизиса | 1985 |
|
SU1323566A1 |
| СТАРТСТОПНАЯ СИСТЕМА СВЯЗИ | 2003 |
|
RU2252489C2 |
| Устройство для формирования спектров с постоянным относительным разрешением по направлениям | 1984 |
|
SU1229775A1 |
| Устройство для учета изделий в формах,перемещаемых конвейером | 1985 |
|
SU1260984A1 |
| Устройство для преобразования серии импульсов во временные интервалы | 1980 |
|
SU866731A1 |
| Устройство для подсчета штучных предметов,перемещаемых конвейером | 1985 |
|
SU1265817A1 |
75Г-р|77.
л- L.,.,jI
jLJ
75
