Изобретение относится к робототехнике и может быть использовано при создании адаптивных роботов, снабженных очувствленными схватами.
Цель изобретения - повышение надежности и упрощение устройства.
На чертеже представлена функциональная схема устройства.
Схема содержит схват 1, губки 2 схвата, деталь 3, датчик 4 проскальзывания, усилитель 5, дифференциатор 6, пороговый элемент 7, триггер 8, первый и второй приводы 9 и 10 соответственно, тактильные датчики 11, блок 12 задания программы, элемент И 13, элемент НЕ 14, первый и второй ключи 15 и 16 соответственно.
Устройство работает следующим образом.
В начальном состоянии схват 1 подведен к захватываемой детали 3, лежащей на столе, губки 2 схвата разведены. Сигналы с тактильных датчиков 11 отсутствуют, элемент И 13 имеет на выходе «О, ключ 16 закрыт, триггер 8 установлен в нулевое состояние, ключ 15 открыт. С блока 12 запоминания программы подается команда на сжатие губок 2 схвата 1. Эта команда через открытый ключ 15 поступает на привод 9 сжатия губок 2, и они начинают сжиматься. Когда губки 2 схвата 1 коснутся детали 3, срабатывают тактильные датчики 11, элемент И 13, ключ 16 открывается и команда на подъем схвата 1 проходит от блока 12 через открытый ключ 16 на привод 10 подъема схвата 1, последний начинает подъем. Губки 2 схвата 1 продолжают сжиматься, сильнее охватывая деталь 3. Однако из-за недостаточного сжатия губок 2 деталь 3 проскальзывает в них, продолжая опираться на поверхность стола. По мере увеличения сжатия губок 2 проскальзывание детали 3 уменьщается, при этом растет нагрузка на схват 1. Нагрузка растет, пока имеет место процесс проскальзывания детали 3. Величину этой механической нагрузки регистрирует датчик 4 (например, тензорезистор или пьезодатчик). Напряжение с датчика 4 усиливается усилителем 5 и дифференцируется дифференциатором 6. Сигнал на выходе дифференциатора 6 не достигает порога срабатывания порогового элемента 7, поэтому на триггер 8 команды не поступают и состояние устройства в этот период не изменяется: схват 1 продолжает движение вверх, а губки 2 схвата 1 все сильнее захватывают деталь 3. Когда сила сжатия губок 2 схвата 1 окажется достаточной для надежной фиксации детали 3, происходит отрыв детали 3 от поверхности стола и подъем ее схватом 1. При этом за короткое время детали 3 сообщается кинетическая энергия, что фиксируется датчиком 4 как кратковременное резкое увеличение веса детали 3, т. е. увеличение механической нагрузки на схват 1. Сигнал, снимаемый с датчика 4, в этот момент имеет выброс. Этот сигнал усиливается усилителем 5, дифференцируется дифференциатором 6, при этом на выходе дифференциатора 6 формируется импульс больщой амплитуды, который приводит к срабатыванию порогового элемента 7. Выходной импульс порогового элемента 7 переводит триггер 8 в единичное состояние, и сигнал с элемента НЕ 14 закрывает ключ 15, при
этом прекращаются поступление команд с блока 12 на привод 9 губок 2 схвата 1 и сжатие. Деталь 3 захвачена.
Дальнейшие манипуляции с деталью 3 производятся согласно программе движения робота. После завершения перемещения детали с блока 12 на нулевой вход триггера 8 подается импульс, при этом триггер 8 переключается и через элемент НЕ 14 открывается ключ 15, через который на привод 9 подается команда на раздвижение губок 2 схвата 1.
Таким образом, предложенное устройство обеспечивает прекращение сжатия детали 3 в момент, когда деталь 3 перестает проскальзывать в губках схвата 1, ч при этом не содержит движущихся узлов в составе
датчика 4 проскальзывания, это повышает надежность работы устройства и упрощает его конструкцию.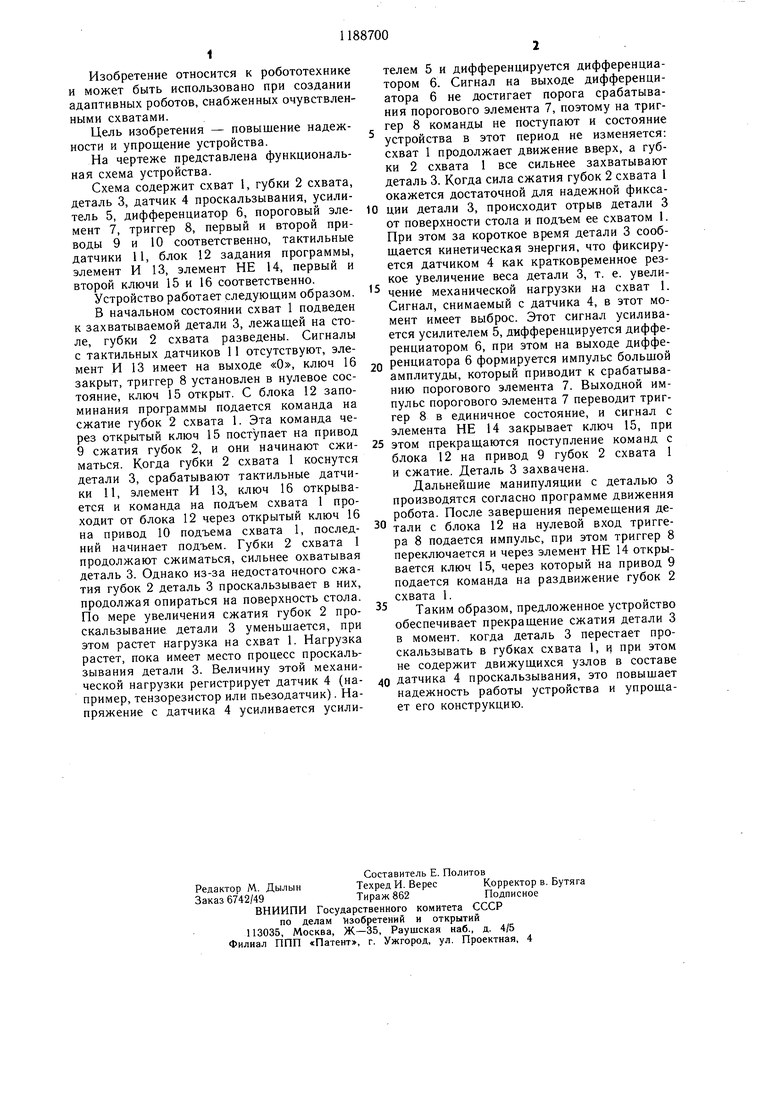
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным роботом | 1988 |
|
SU1541556A2 |
| Устройство для адаптации робота к весу захватываемых деталей | 1986 |
|
SU1395436A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Измерительный схват промышленного робота | 1984 |
|
SU1278204A1 |
| Устройство для управления схватом манипулятора | 1989 |
|
SU1754439A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Адаптивный схват промышленного робота | 1985 |
|
SU1303403A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТОМ, содержащее блок задания программы, тактильные датчики, первый и второй приводы и датчик проскальзывания, выход которого соединен с входом усилителя, отличающееся тем, что, с целью повышения надежности и упрощения устройства, оно содержит последовательно соединенные дифференциатор, пороговый элемент, триггер, элемент НЕ и первый ключ, а также последовательно подключенные элемент И и второй ключ, выход которого соединен с входом второго привода, а второй вход - с первым выходом блока задания программы, подключенного вторым выходом к второму входу триггера, а третьим выходом - к второму входу первого ключа, выход которого соединен с входом первого привода, выход усилителя подключен к входу дифференциатора, а выходы тактильных датчиков соединены с первым и вторым входами элемента И. (Я 72 сх 00 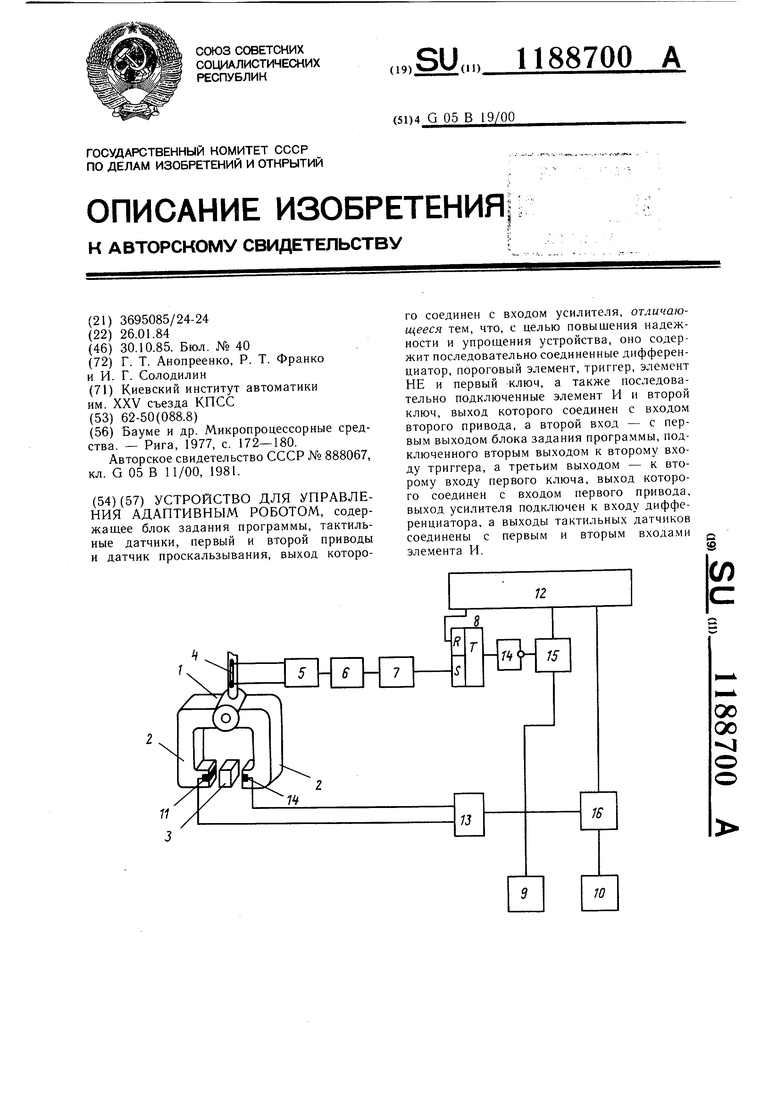
| Бауме и др | |||
| Микропроцессорные средства | |||
| - Рига, 1977, с | |||
| Приспособление для воспроизведения изображения на светочувствительной фильме при посредстве промежуточного клише в способе фотоэлектрической передачи изображений на расстояние | 1920 |
|
SU172A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
