Изобретение относится к автоматике и может быть использовано при основании и построении сложных технических систем с движущимися объектами.
Известны модели радиолокационных средств, например модель РЛО.
Недостатком указанной модели является сложность ее реализации.
Наиболее близким техническим решением к предлагаемому устройству является устройство для моделирования блокируемых траекторий, содержащее соединенные анализатор траектории и декодер блокирования.
Недостатком устройства является невозможность обрабатывать взаимодействие траектории и подвижного препятствия.
Цель изобретения является повышение точности моделирования за счет параллельной обработки взаимодействия объекта с несколькими препятствиями.
Поставленная цель достигается тем, что в устройство для моделирования блокируемых траекторий, содержащее первый блок вычисления координат препятствия и блок вычисления координат траекторий, выход которого соединен с первым входом первого блока вычисления расстояния, информационный выход которого подключен к первому информационному входу блока селекции, введены блок предварительной селекции, (п-1) блоков вычисления расстояния, (п-1) блоков вычисления координат препятствий и блок синхронизации, причем блок предварительной селекции включает счетчик, дешифратор, п элементов И, элемент ИЛИ, блок памяти времени начала траектории, схему сравнения и регистр номера траектории, выход которого является одноименным выходом блока предварительной селекции, выход сброса которого подключен к выходу переполнения счетчика, информационный выход которого соедиЧ
сл ел ю «о
нен с адресным входом блока памяти времени начала траектории, с входом дешифратора и с информационным входом регистра номера траектории, синхровход которого подключен к выходу схемы сравнения и выходу готовности блока предварительной селекции, вход задания текущего времени которого соединен с первым входом схемы сравнения, второй вход которого подключен к выходу блока памяти времени начала траектории, выходы дешифратора соединены с первыми входами элементов И, выходы которых подключены к входам элемента ИЛИ, выход которого соединен с синхровходом блока памяти времени начала траектории и через элемент задержки - с сичхровходом схемы сравнения, вторые входы элементов И являются входом исключенных траекторий блока предварительной селекции, первый синхровыход блока синхронизации соединен со счетным входом счетчика блока предварительной селекции, выходы сброса и готовности которого подключены к одноименным входам блока синхронизации, второй синхровход которого соединен с синхровходами блока вычисле- ни 1 координат траекторий и с синхровхода- ми блоков вычисления координат препятствий, выходы которых подключены к вторым входам соответствующих блоков вычисления расстояния, знаковые выходы которых соединены с соответствующими управляющими входами блока селекции, выход исключенных траекторий которого подключен к одноименному входу блока предварительной селекции, выход регистра номера текущей траектории которого подключен к одноименному входу блока селэк- ции и к одноименному входу блока вычисления координат траекторий, которого соединен с первым входом 1-го (I 2, 3п) блока вычисления расстояния, информационный выход которого подключен к 1-му информационному входу блока селекции, выходы блокированных и пропущенных траекторий которого являются выходами устройства, вход синхронизации блока селекции соединен с третьим выходом блока синхронизации, вход которого является входом запуска устройства, вход задания текущего времени которого подключен к одноименным входам блоков вычисления координат траекторий, вычисления координат препятствий и предварительной селекции, а блок селекции содержит дешифратор, две группы элементов И, первый и второй выходные регистры, элемент И, группу элементов ИЛИ, регистр, схему сравнения и сумматор, входы которого являются информационными входами
блока селекции, выход сумматора подключен к входу регистра, выход которого соединен с входом схемы сравнения, выход которой подключен к первым входам элементов И первой группы, выходы которых соединены с входами первого выходного регистра, выходы которого являются выходами блокированных траекторий блока селекции и подключены к первым входам
0 элементов ИЛИ группы, выходы которых являются выходом исключенных траекторий блока селекции, управляющие входы которого соединены с входами элемента И, выход которого подключен к первым входам
5 элементов И второй группы, выходы которых соединены с входами второго выходного регистра, выходы которого подключены к вторым входам элементов ИЛИ группы и являются выходом пропущенных траекто0 рий блока селекции, вход номера текущей траектории которого соединен с входом дешифратора, выходы которого подключены к соответствующим вторым входам элементов И первой и второй групп, вход синхро5 низации схемы сравнения является входом синхронизации бока селекции.
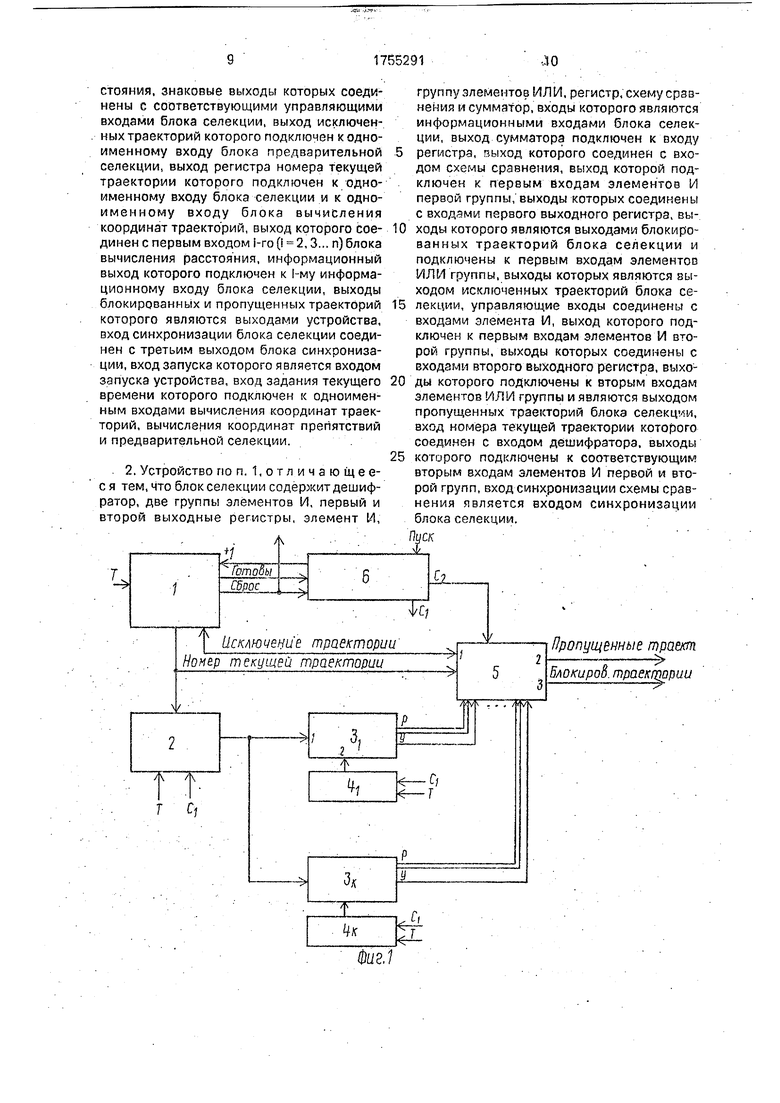
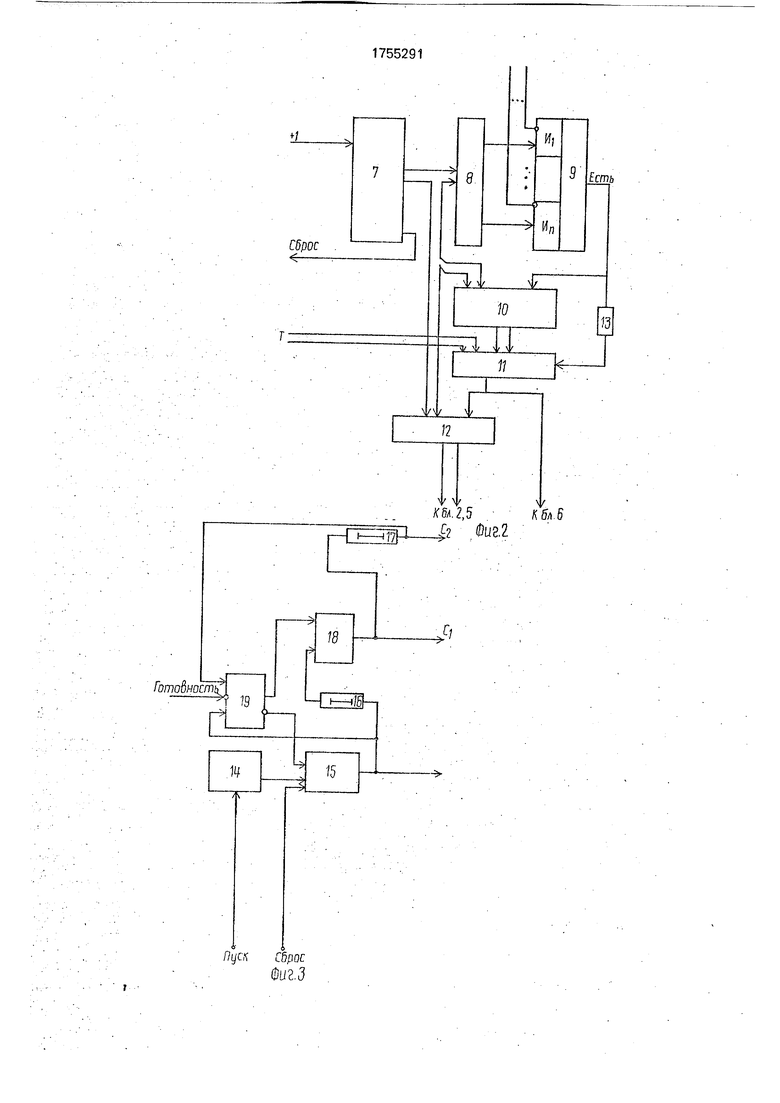
На фиг, 1 представлена схема устройства; на фиг. 2 - вариант блока предварительной селекции; на фиг. 3 - вариант блока
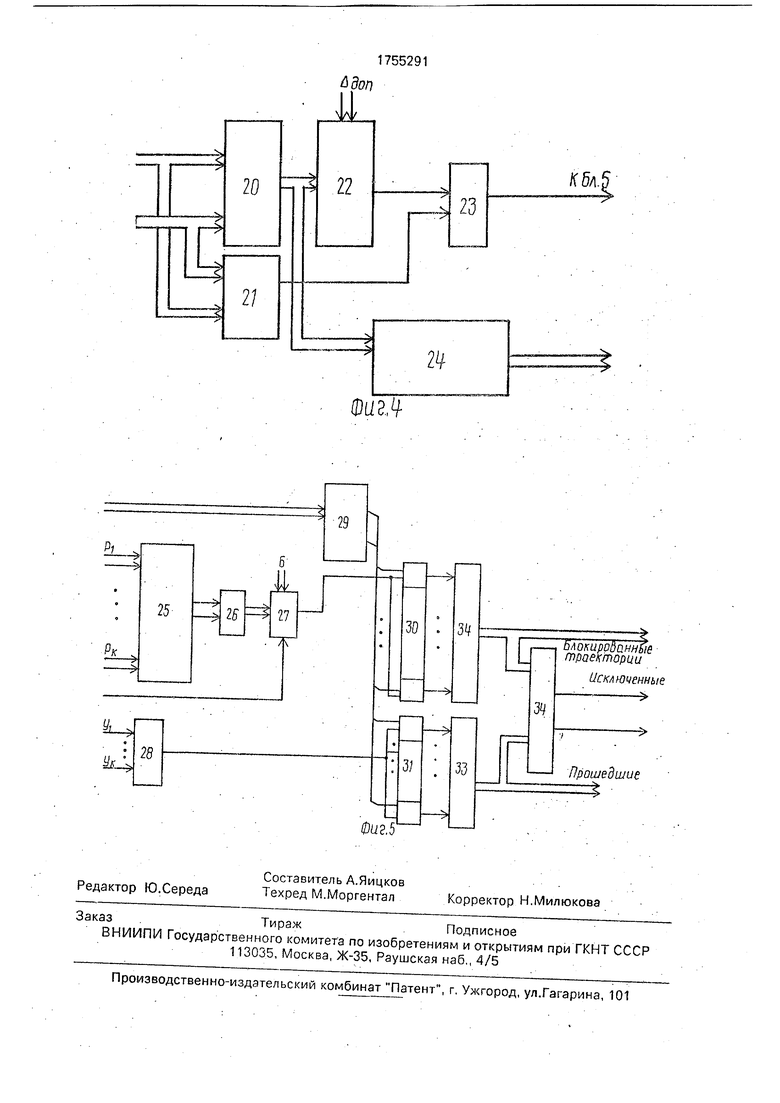
0 синхронизации; на фиг. 4 - вариант блока вычисления расстояния; на фиг. 5 - вариант реализации блока селекции.
Устройство включает блок 1 предварительной селекци , блок 2 вычисления коор5 цинат траекторий, блоки 3i - Зп вычисления расстояния, блоки вычисления координат препятствий, блок 5 селекции и блок 6 синхронизации.
Блок 1 предварительной селекции (фиг.
0 2) содержит счетчик 7, дешифратор 8, элемент 9 N И-ИЛИ, блок 10 памяти времени начала траектории, схему 11 сравнения, регистр 12 номера траектории 4, элемент 13 задержки. Суммирующий вход счетчика 7
5 соединен со счетным входом 1 блока, выход переполнения счетчика 7 является выходом сброса блока.
Елок б (фиг. 3) содержит последовательно соединенные генератор 14 импульсов,
0 первый элемент И 15, элементы 16, 17 задержки, второй элемент И 18, триггер 19.
Блоки 2 и 4 выполнены в виде ПЗУ, адресные входы которых соединены с информационными входами блоков, а вход
5 управления - с соответствующими синхровходами.
Блок 3 вычисления расстояния (фиг. 4) содержит вычитатель 20, схемы 21 и 22 сравнения, элемент И 23 и кодопреобразователь 24,
Блок селекции 5 (фиг. 5) содержит последовательно соединенные сумматор 25, регистр 26, схему 27 сравнения, элемент И 28, дешифратор 29, первую 30 и вторую 31 группы элементов И, первый и второй регистры 32 и 33, группу элементов ИЛИ 34.
Устройство работает следующим образом.
При моделировании очередная траектория блокируется N препятствиями. Блокировка сводится к вычислению ущерба траектории каждым из препятствий. Суммарный ущерб N препятствий вычисляется по формуле
-i
Р..
i 1
Причем, если Р Рблок, то траектория считается блокированной, Рблок рассчитывается заранее и подается на вход устройства. Pi вычисляется, как функция от расстояния А между координатой траектории и препятствием на момент времени Т,
Функция PI PJ (Д) рассчитывается для каждого препятствия (например, задается вероятной мерой) и записывается в виде двоичного кода в кодопреобразователь 24. Если координаты траектории больше координат всех препятствий на величины их заранее рассчитанного допуска, траектория считается прошедшей и в дальнейшем не моделируется,
Блок 1 предварительной селекции предназначен для последовательного опроса моделируемых траекторий, и те траектории, время старта которых меньше модельного (времена стартов траекторий предварительно записываются в блок 10 памяти времени начала траекторий), не моделируются (нет сигнала с выхода схемы 11 сравнения). Также не моделируются уже исключенные в ходе моделирования траектории.
Если траектория моделируется, то ее номер запоминается в регистре 2 и выдается на блоки 2 и 5. Блок 2 по номеру моделируемой траектории и времени моделирования Т выдает координату траектории. При этом номер траектории подается на старшие, а Т - на младшие разряды адреса блока памяти, а синхронизация считы- ванмя задается сигналом с блока управления.
Блок 4 аналогично выдает координаты препятствий.
Блок 3 по координа гам выдает Р и если координата траектории на Ддоп превосходит координату препятствия, выдает с элемента 23 И сигнал 1, показывающий, что
траектория прошла соответствующее препятствие.
Блок 5 вычисляет произведение ущерба от всех препятствий. Если ущерб больше 5 некоторого порога Рблок, то по тактовому сигналу Сз в разряд регистра 32, соответствующий номеру траектории, запишется единица - траектория блокирована. Если все препятствия пройдены и на управляющих
0 входах У -Ук сигналы 1м, то единица запишется через элемент И 28 в разряд рассматриваемой траектории регистра 33.
С элемента ИЛИ 34 группы номера исключаемых из рассмотрения траекторий в по5 зиционном коде подаются на выход блока, Номера блокируемых траекторий и прошедших траекторий в позиционном коде подаются на выход устройства.
Начальной установкой (цепи условно не
0 показаны) устанавливаются в нулевое состояние регистра и счетчики устройства.
Генератор 14 формирует импульс, поступающий на вход +1 счетчика 7. С инфор- мационйых выходов счетчика 7 снимается
5 номер очередной моделируемой траектории. Позиционный код рассматриваемой траектории сравнивается с позиционными кодами немоделируемых траекторий, поступающих с выхода Исключение блока 5.
0 Если рассматриваемая траектория была блокирована или вышла за пределы препятствий, то в соответствующем разряде позиционного кода исключенных траекторий сигнал 1 (фиг 5). При этом с выхода элемен5 та N И-ИЛИ 9 снимается сигнал 0 и траектория не моделируется.
Если расматриваемая траектория не исключена из рассмотрения, то на выходе элемента 9 N И-ИЛИ сигнал 1, то проверяется
0 следующее условие: успела ли траектория стартовать. Для этого значение времени старта траектории, записанное в блоке 10 памяти, сравнивается с временем моделирования поступающим на входТ-устройст5 ва,
При этом на адресные входы блока 10 памяти и информационные входы регистра 12 подается номер рассматриваемой траек0 тории. Сигналом с выхода элемента 9 N И- ИЛИ на вход считывания блока 10 памяти проводится выборка числа времени старта траектории. Если это время больше, чем число Т, то по сигналу на синхровходе схемы
5 11 сравнения на ее выходе сформируется сигнал, который разрешит запись номера траектории в регистр 12 и подачу его на блок 2 вычисления координат траекторий и блок 5 селекции, а также сигналом на инверсном динамическом входе триггера 36 разрешит
прохождение сигналов С2, Сз на выход блока 6.
Время задержки на элементе задержки 16 больше, чем задержка на элементе 13 задержки, и меньше, чем период следова- ния импульсов с генератора 14.
Если траектория должна моделироваться и ее номер записан в регистре 12, то происходит оценка блокировки траектории соответствующим препятствием,
При этом по сигналу Ci происходит следующее.
На адресные входы блока 2 подается код номера траектории и значение времени, а по сигналу Са на выходе блока 1 появляется код координаты траектории.
Аналогично по сигналу Cz на выходе блока А появляются координаты препятствия на моделируемый момент времени. Поступая на блок 3, координаты траектории и препятствия обеспечивают вычисление ущерба траектории. При этом ущерб вычисляется как функция от расстояния между траекторией и препятствием. Вычитатель 20 определяет расстояние Дтраектории и пре- , если DELTA ДДОп , то на первый вход элемента И 23 подается единичный сигнал, Причем, если значение координат траектории больше, чем координат препятствия, то с выхода схемы 21 сравнения поступает единичный сигнал и на выходе элемента 23 и появится 1, которая говорит о том, что траектория преодолела препятствие.
В кодопреобразователь 24 записывается значение ущерба как функции от Д(рас- чет функции проводится заранее в зависимости от типа препятствия).
С выходов блоков 3 на блок 5 подаются значения ущербов на каждом препятствии Если сумма ущербов с выхода регистра 26 больше, чем предельно допустимая, предлагающаяся на второй вход схемы 27 сравнения, то по сигналу Сз на первые входы элементов И 3 С подается 1, Номер моделируемой траектории, формируемой в позиционном коде дешифратором 29, подается на второй вход соответствующего элемента И 30 и обеспечивает запись по прямому динамическому S-входу соответствующего разряда регистра 32. Если все препятствия преодолены, то на выходе элемента И 28 формируется 1, которая обеспечит запись единицы в соответствии разряд регистра 33.
В результате моделирования на выходе регистра 32 будут записаны позиционные коды блокированных траекторий, на выходе регистра 33 - прошедшие траектории, на выходе группового элемента 34 - коды траекторий, исключенные из дальнейшего рассмотрения.
Если в дальнейшем требуется дальнейшее проведение моделирования с учетом
предыстории, то обнуляется счетчик 7, изменяется время Т моделирования и процесс моделирования повторяется.
Формула изобретения
1, Устройство для моделирования бло0 кируемых траекторий, содержащее первый блок вычисления координат препятствий и блок вычисления координат траекторий, выход которого соединен с первым входом первого блока вычисления расстояния, мн5 формационный выход которого подключен к первому информационному входу блока селекции, отличающееся тем, что, с целью повышения точности, в него введены блок предварительной селекции, п-1 блоков
0 вычисления расстояния, п-1 блоков вычисления координат препятствий и блок синхронизации, причем блок предварительной селекции включает счетчик, дешифратор, п элементов И, элемент ИЛИ, блок памяти
5 времени начала траектории, схему сравнения и регистр номера траектории, выход которого является одноименным выходом блока предварительной селекции, выход сброса которого подключен к выходу пере0 полнения счетчика, информационный выход которого соединен с адресным входом блока памяти времени начала траектории, с входом дешифратора и с информационным входом регистра номера траектории, синх5 ровход которого подключен к выходу схемы сравнения и выходу готовности блока предварительной селекции, вход задания текущего времени которого соединен с первым входом схемы сравнения, второй вход кото0 рой подключен к выходу блока памяти времени начала траектории, выходы дешифратора соединены с первыми входами элементов И, выходы которых подключены к входам элемента ИЛИ, выход которого
5 соединен с синхровходом блока памяти времени начала траектории и через элемент задержки - с синхровходом схемы сравнения, вторые входы элементов И являются входом исключенных траекторий блока
0 предварительной селекции, первый синх- ровход блока синхронизации соединен со счетным входом счетчика блока предварительной селекции, выходы сброса и готовности которого подключены к одноименным
5 входам блока синхровыход которого соединен с синхроводами блока вычисления координат траекторий и с синхровходами блоков вычисления координат препятствий, выходы которых подключены к вторым входам соответствующих блоков вычисления расстояния, знаковые выходы которых соединены с соответствующими управляющими входами блока селекции, выход исключенных траекторий которого подключен к одноименному входу блока предварительной селекции, выход регистра номера текущей траектории которого подключен к одноименному входу блока селекции и к одноименному входу блока вычисления координат траекторий, выход которого соединен с первым входом i-ro (i 2,3... п) блока вычисления расстояния, информационный выход которого подключен к l-му информационному входу блока селекции, выходы блокированных и пропущенных траекторий которого являются выходами устройства, вход синхронизации блока селекции соединен с третьим выходом блока синхронизации, вход запуска которого является входом запуска устройства, вход задания текущего времени которого подключен к одноименным входами вычисления координат траекторий, вычисления координат препятствий и предварительной селекции.
й
2. Устройство поп, 1,отличающее- с я тем, что блок селекции содержит дешифратор, две группы элементов И, первый и второй выходные регистры, элемент И,
л
группу элементов ИЛ И, регистр, схему сравнения и сумматор, входы которого являются информационными входами блока селекции, выход сумматора подключен к входу
5 регистра, чыход которого соединен с входом схемы сравнения, выход которой подключен к первым входам элементов И первой группы, выходы которых соединены с входами первого выходного регистра, вы10 ходы которого являются выходами блокированных траекторий блока селекции и подключены к первым входам элементов ИЛИ группы, выходы которых являются выходом исключенных траекторий блока се- 15 лекции, управляющие входы соединены с входами элемента И, выход которого подключен к первым входам элементов И второй группы, выходы которых соединены с входами второго выходного регистра, выхо20 ды которого подключены к вторым входам элементов ИЛИ группы и являются выходом пропущенных траекторий блока селекцэд, вход номера текущей траектории которого соединен с входом дешифратора, выходы
25 которого подключены к соответствующим вторым входам элементов И первой и второй групп, вход синхронизации схемы сравнения является входом синхронизации блока селекции.
Писк ji
Пропущенные траект
БлокироВ траектории
/
И,
| название | год | авторы | номер документа |
|---|---|---|---|
| Буферное запоминающее устройство | 1989 |
|
SU1654875A1 |
| Буферное запоминающее устройство | 1990 |
|
SU1833918A1 |
| Буферное оперативное запоминающее устройство | 1988 |
|
SU1559379A1 |
| Устройство для распознавания элементов треков | 1983 |
|
SU1161969A1 |
| Процессор с микропрограммным управлением | 1990 |
|
SU1700564A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Устройство для селекции изображений | 1991 |
|
SU1837335A1 |
| Параллельный логический мультиконтроллер | 2016 |
|
RU2634199C1 |
| Тренажер для обучения сварщиков | 1986 |
|
SU1441446A1 |
| Многоканальный программируемый преобразователь код-фаза | 1990 |
|
SU1742998A1 |
Изобретение относится к автоматике и может быть использовано при обосновании и построении сложных технических систем с динамическими объектами, Цель изобретения - повышение точности моделирования. Устройство содержит блоки вычисления координат траекторий и препятствий, блоки предварительной селекции, селекции и блок синхронизации, Блокировка траекторий определяется по сообщению ее координат и координат препятствий. 1 з.п, ф-лы, 5 ил.
W
Готовность
79
П
15
Пуск сброс
ФигЗ
-
г
Есть
Ь
Ј
/Гй 2,5К Вл В
1 С Йи2 2
г/
Адоп
Д
л
-SJ
10
г
п
23
Кбл
1
14-$
шъй
| Моделирование в радиолокации | |||
| Под ред | |||
| А | |||
| И | |||
| Леонова | |||
| М,: Советское радио, 1979 с 237 ПатентСША№4764873, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
