Известны моторные захваты грейферного типа для транспортировки длинномерных грузов, например пучков древесины, с челюстями, перемещающимися по роликам от привода, состоящего из электродвигателя, редуктора и трансмиссионных валов, с закрепленными на них звездочками.
Предложенный захват отличается от известных тем, что в нем челюсти снабжены зажимными механизмами, включающими полиспастную систему с подвижной роликовой обоймой и подпружиненным натяжным устройством и гибкий тяговый орган, один конец которого закреплен на челюсти, а другой конец - через полиспастную систему механизма - на корнусе захвата. Это обеспечивает устойчивое положение груза в захвате и повышает надежность его зажатия в челюстях.
Для передачи крутящего момента от электродвигателя к челюстям, на последних укреплены шарнирно-роликовые цепи, находящиеся в зацеплении со звездочками. Для ограниче.ния момента привода и отключения электропитания в случае перегрузки захвата, электродвигатель подвешен к корпусу редуктора вертикально через шариковое поворотное устройство так, что при повороте статора последний посредством штока, шарнирно закрепленного на нем, взаимодействует с конечным выключателем.
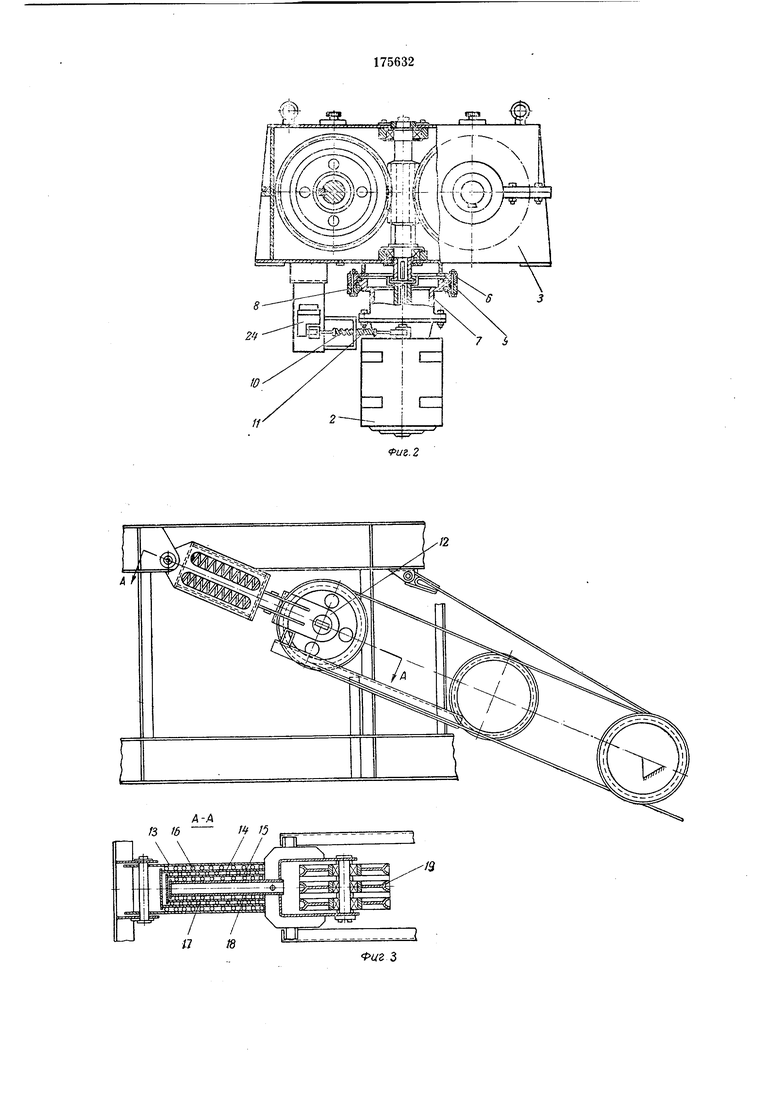
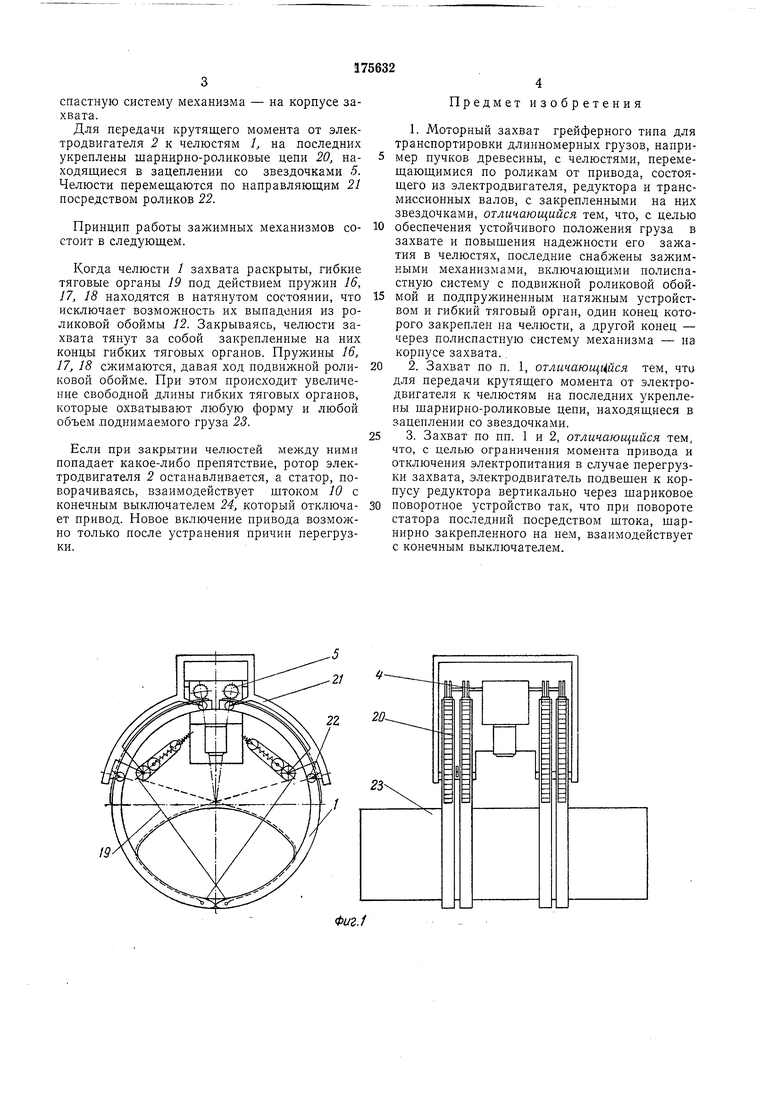
На фиг. 1 изображен общий вид описываемого захвата; на фиг. 2 - привод захвата; на фиг. 3 - зажимной механизм с разрезом по А-А.
Моторный захват включает привод, зало1Мные механизмы и челюсти /. Привод захвата содержит электродвигатель 2, редуктор 3 и трансмиссионные валы 4 с закрепленнымн на них звездочками 5. Электродвигатель подвешен к корпусу редуктора вертикально через шариковое поворотное устройство, состоящее из верхней обоймы 6, соединенной с корпусом редуктора, и стакана 7, прикрепленного к фланцу электродвигателя. В двух круговых канавках поворотного устройства расположены два ряда шариков 8, закрепляемых посредством нижней кольцевой обоймы 9, б тагодаря чему статор электродвигателя имеет возможность вращения. Статор посредством штока 10 и пружин // шарнирно прикреплен к корпусу редуктора 3.
Каждый из зажим.ных механизмов захвата включает полнспастную систему с подвижной
роликовой обоймой 12 и подпружиненным натяжным устройством, состоящим из стаканов 13, 14, 15, между которыми концентрично расположены пружины 16, 17, 18, и гибкий тяговый орган 19. Один конец тягового органа заспастную систему механизма - на корпусе захвата. Для передачи крутящего момента от электродвигателя 2 к челюстям 1, на последних укреплены шарнирно-роликовые цепи 20, находящиеся в зацеплении со звездочками 5. Челюсти перемещаются по направляющим 21 посредством роликов 22. Принцип работы зажимных механизмов состоит в следующем. Когда челюсти / захвата раскрыты, гибкие тяговые органы 19 под действием пружин 16, 17, 18 находятся в натянутом состоянии, что исключает возможность их выпадения из роликовой обоймы 12. Закрываясь, челюсти захвата тянут за собой закрепленные на них концы гибких тяговых органов. Пружины 16, 17, 18 сжимаются, давая ход подвижной роликовой обойме. При этом происходит увеличение свободной длины гибких тяговых органов, которые охватывают любую форму и любой объем поднимаемого груза 23. Если при закрытии челюстей между ними попадает какое-либо препятствие, ротор электродвигателя 2 останавливается, а статор, поворачиваясь, взаимодействует штоком 10 с конечным выключателем 24, который отключает привод. Новое включение привода возможно только после устранения причин перегрузки. 4 Предмет изобретения 1.Моторный захват грейферного типа для транспортировки длинномерных грузов, например пучков древесины, с челюстями, перемещающимися по роликам от привода, состоящего из электродвигателя, редуктора и трансмиссионных валов, с закрепленными на них звездочками, отличающийся тем, что, с целью обеспечения устойчивого положения груза в захвате и повышения надежности его зажатия в челюстях, последние снабжены зажимными механизмами, включающими полиспастную систему с подвижной роликовой обоймой и подпружиненным натяжным устройством и гибкий тяговый орган, один конец которого закреплен на челюсти, а другой конец - через полиспастную систему механизма - на корпусе захвата.. 2.Захват по п. 1, отличающейся тем, чти для передачи крутящего момента от электродвигателя к челюстям на последних укреплены шарнирно-роликовые цепи, находящиеся в зацеплении со звездочками. 3.Захват по пп. 1 и 2, отличающийся тем, что, с целью ограничения момента привода и отключения электропитания в случае перегрузки захвата, электродвигатель подвешен к корпусу редуктора вертикально через шариковое поворотное устройство так, что при повороте статора последний посредством штока, шарнирно закрепленного на нем, взаимодействует с конечным выключателем.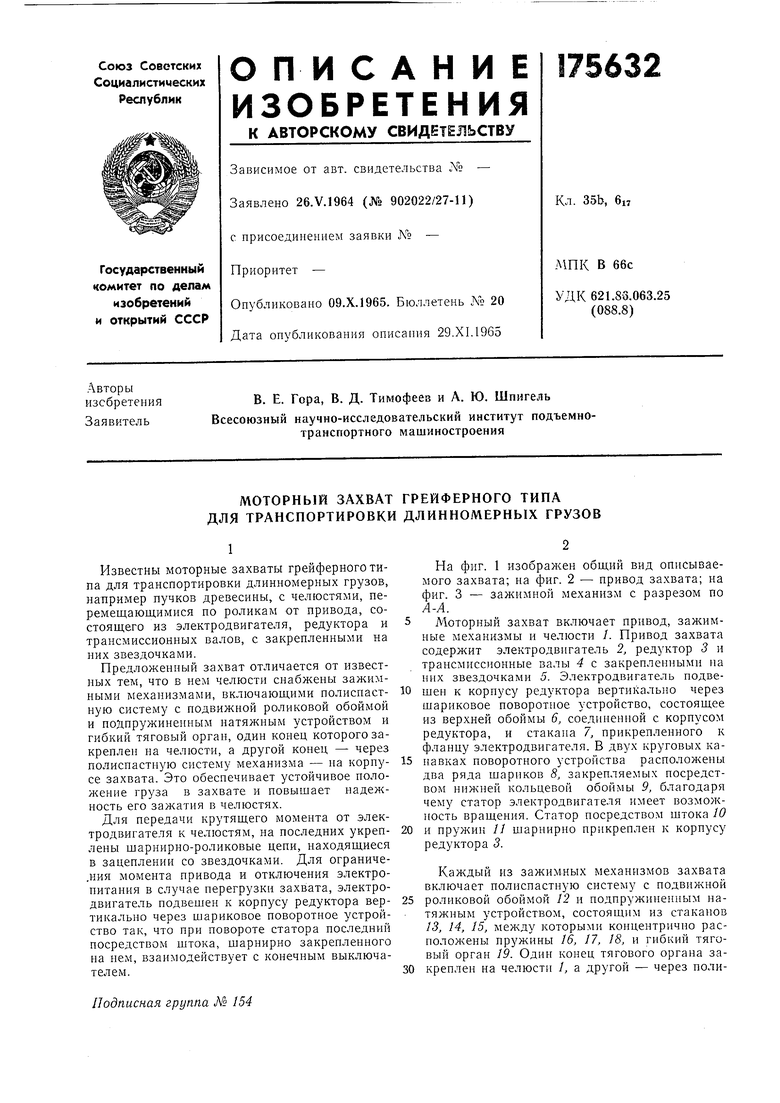
| название | год | авторы | номер документа |
|---|---|---|---|
| Навесной грейфер для захвата и свинчивания стеклопластиковых труб | 2023 |
|
RU2816588C1 |
| Механизированный стеллаж | 1990 |
|
SU1813685A1 |
| ЛИФТ С ДВУМЯ КАБИНАМИ | 2008 |
|
RU2495814C2 |
| Устройство для отпирания замка крышки люка вагона | 1988 |
|
SU1579854A1 |
| УСТРОЙСТВО для ПЕРЕДАЧИ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU373235A1 |
| МОСТОВОЙ КРАН | 1969 |
|
SU247482A1 |
| ГРЕЙФЕР | 2007 |
|
RU2356826C1 |
| Устройство для загрузки транспортных средств сыпучими грузами | 1985 |
|
SU1511167A1 |
| Уравновешенный манипулятор | 1991 |
|
SU1813621A1 |
| Мини-агрегат для сельскохозяйственных работ | 1982 |
|
SU1055361A1 |