Изобретение относится к машиностроению и может быть использовано для уравновешивания массы подвижного звена, совершающего поступательное движение вдоль вертикальной оси и имеющего направляющие.
Целью изобретения является уменьшение массы и упрощение конструкции устройства.
Конструкция уравновешенного манипулятора представлена на фиг. 1 и 2.
Манипуляционная система включает стойку (неподвижное звено) 1, являющуюся направляющей горизонтально перемещаемого звена 2, которое, в свою очередь, является направляющей для вертикально перемещаемого звена 3. На звене 3 установлены свободно вращающиеся отклоняющие ролики 4, огибаемые гибким тяговым органом 5. На звене 2 установлены свободно вращающиеся ролики б и 7. Гибкий орган 5, огибая ролики 6 и 7, изменяет расположение ветвей с вертикального на горизонталь- ные. Горизонтальные ветви одного направления закреплены непосредственно на стойке 1 с помощью устройства 8, а горизонтальные ветви гибкого тягового органа другого направления через обводной блок 9 запасован в полиспастную систему, неподвижные свободновращающиеся блоки 10 которой смонтированы на стойке 1, а подвижные свободновращающиеся блоки 11- на качающемся рычаге 12, шарнирная опора которого также установлена на стойке 1. Одновременно качающийся рычаг 12 шар- нирно сопряжены с пружинной обоймой 13, корпус которой, в свою очередь, шарнирно сопряжен со стойкой 1,
Уравновешенный манипулятор работает следующим образом.
После запасовки гибкого тягового органа с закреплением на стойке 1 с помощью устройства 8 натяжением пружины в обойме 13 создается усилие на подвижных блоках 11 полиспаста, которое обусловливает натяжение гибкого тягового органа 5 силой F, что обеспечивает статическое уравновешивание звена 3.
При отработке координаты qz вторым звеном ролики А, 6 и 7, свободно перекатываясь по гибкому тяговому органу 5, обеспечивают постоянство действия уравновешивающее звено 3. Усилия при фиксированной его ориентации относительно звена 2.
При отработке координаты рз звеном 3 возникающий избыток (или недостаток) гибкого тягового органа в вертикальных ветвях (в зависимости от направления движения звена 3) компенсируется за счет перемещения подвижных блоков полиспаста 11 поворотом рычага 12.
Новым в предлагаемой конструкции является установка на уравновешиваемом,
вертикально перемещаемом звене свободно вращающихся отклоняющих роликов, огибаемых гибким тяговым органом, вертикальные ветви которого меняют свое направление на горизонтальное за счет
0 применения свободно вращающихся роликов, установленных на звене, являющемся направляющим для уравновешиваемого звена, а также закрепление горизонтальных ветвей одного направления на стойке мани5 пулятора, и связь ветвей противоположного направления через обводные блоки и полиспастную систему, подвижные блоки которой установлены на качающемся рычаге, который, в свою очередь, шарнирно соеди0 нен с пружинной обоймой, корпус которой шарнирно закреплен на неподвижном звене манипулятора.
Техническими преимуществами заявляемого устройства по сравнению с прототи5 пом является уменьшение массы устройства, упрощение конструкции, возможность развязки вертикальных и горизонтальных движений.
Горизонтальные ветви тягового органа
0 5 могут не закрепляться на стойке 1, а соединяться между собой при помощи отводных блоков 8. Такая конструкция выравнивает силу натяжения тяговых органов 5 и способствует более плавной отра5 ботки координаты qj.
Формула изобретения Уравновешенный манипулятор, содер- жащий основание, звенья, одно из которых имеет возможность вертикального переме0 щения относительно другого с образованием поступательной кинематической пары, натяжное устройство, имеющее по меньшей мере один обводной блок, огибающий этот блок гибкий тяговый орган и связанный с
5 ним и с основанием пружинный механизм, отличающийся тем, что, с целью уменьшения массы и упрощения конструкции, натяжное устройство имеет группу обводных блоков, расположенных на звеньях.
0 и группу блоков, образующих полиспастную систему с гибким тяговым органом, а пружинный механизм выполнен в виде пружинной обоймы, корпус которой шарнирно закреплен на основании, и рычага, шарнир5 но связанного с основанием, с пружинной обоймой и с одним блоком полиспастной системы, второй блок которой шарнирно связан с основанием и в него зэпасован один конец гибкого тягового органа, другой конец которого связан с основанием.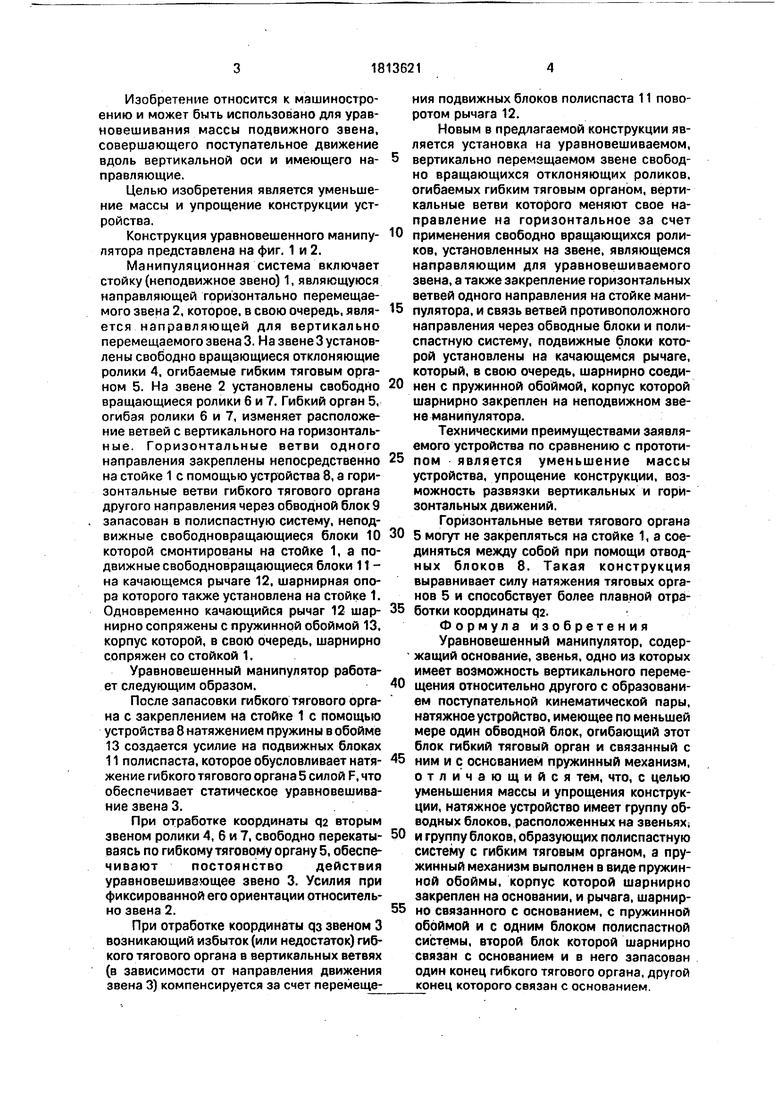
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вытрамбовывания котлованов | 1983 |
|
SU1135840A1 |
| ПЕРЕГРУЖАТЕЛЬ | 1991 |
|
RU2009969C1 |
| Устройство для возведения стоечной крепи в очистном забое | 1985 |
|
SU1312178A1 |
| Устройство для перемещения захвата манипулятора | 1982 |
|
SU1079599A1 |
| Рука манипулятора | 1983 |
|
SU1076276A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| КАБЕЛЕУКЛАДЧИК ВЫЕМОЧНОЙ МАШИНЫ | 1991 |
|
RU2021504C1 |
| Буровая вышка | 1982 |
|
SU1025861A1 |
| СЕКЦИЯ БЕЗРАЗГРУЗОЧНОЙ БАЛЛОННОЙ КРЕПИ | 1991 |
|
RU2029095C1 |
Использование: в машиностроении, в частности для уравновешивания массы подвижного звена, совершающего поступательное движение вдоль вертикальной оси и имеющего направляющие. На перемещаемом звене 3 установлены свободно вращающиеся отклоняющие ролики 4, огибаемые гибким тяговым органом 5, вертикальные ветви которого изменяют свое направление на горизонтальное за счет огибания других, свободно вращающихся роликов 6 и 7, установленных на звене 2, являющемся направляющим для уравновешиваемого звена 3. При этом горизонтальные ветви одного направления закреплены на стойке 1 манипулятора, а горизонтальные ветви противоположного направления, связанные через обводные блоки 9, запасованы в подвижные блоки 10, которые установлены на качающемся рычаге 12, который, в свою очередь, шарнирно соединен с пружинной обоймой 13, корпус которой шарнирно закреплен на неподвижном звене 1 манипулятора. 2 ил. СО с
| Пружинный механизм | 1980 |
|
SU932005A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
