1
Изобретение относится к конвейеростроению и может быть использовано при производстве погрузочпо-выгрузочных и складских операций.
Известны устройства для передачи штучных грузов с одного подвесного конвейера на другой, расположенные под углом один к другому, включающие гибкий тяговый орган, несущий подвески с грузом, грузовую каретку, совершающую возвратно-поступательное движение в вертикальной плоскости по направляющим, привод грузовой каретки с полиспастной системой и установленный на грузовой каретке механизм съема груза с подвески, выполненный в виде подвижного вилочного захвата.
Однако известные устройства имеют довольно сложную конструкцию и не обеспечивают синхронности передачи груза с конвейера на конвейер и регулировки момента съема груза, что не исключает возможности сбрасывания груза во время движения конвейеров.
Цель изобретения - обеспечение синхронности передачи груза с конвейера на конвейер. Для этого механизм привода грузовой каретки выполнен в виде приводного вала, на одном конце которого закреплена звездочка, взаимодействующая с гибким тяговым органом подвесного конвейера, а на другом - установлен круговой копир, снабженный роликом, жестко связанным с подвижным блоком
полиспаста, свободная ветвь которого прикреплена к грузовой каретке. Для обеспечения регулировки момента съема груза во время движения конвейеров на приводном валу
установлены две полумуфты, выполненные в виде шестерен с торцовыми зубьями, причем одна из полумуфт жестко связана с круговым копиром и имеет возможность осевого перемещения вдоль приводного вала, а другая -
жестко закреплена на нем.
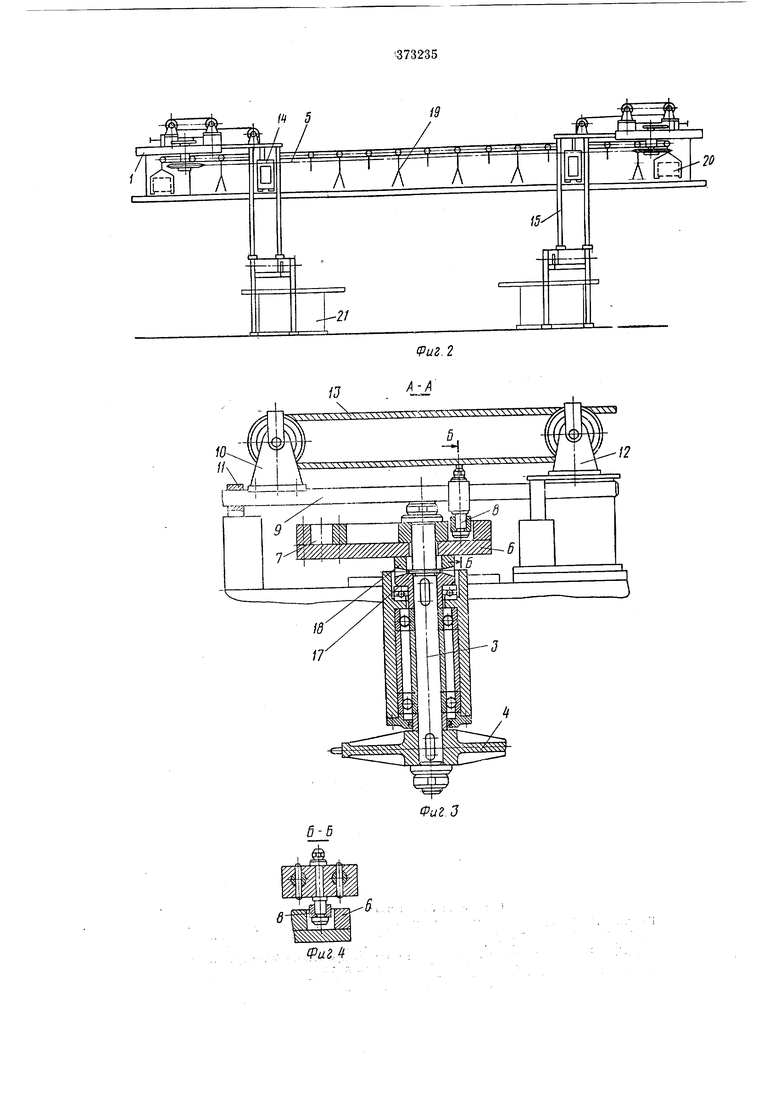
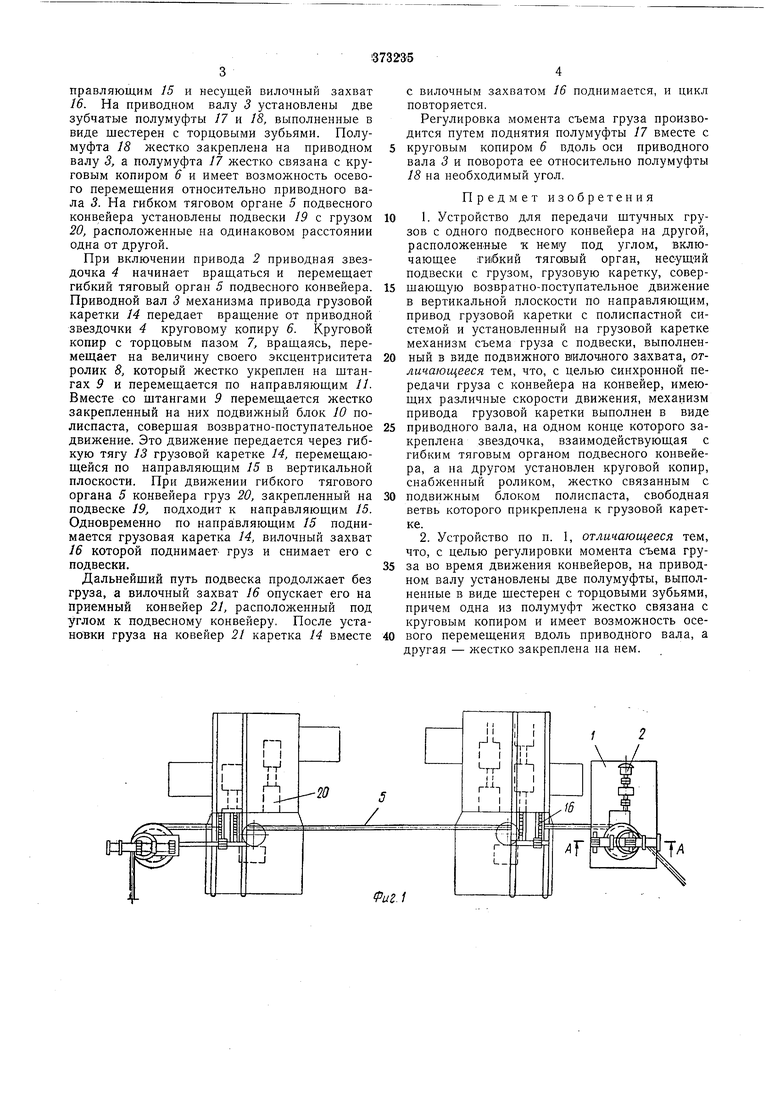
На фиг. 1 показано описываемое устройство в плане; на фиг. 2 - то же, вид сбоку; на фиг. 3-разрез по А-Л на фиг. 1; на фиг. 4- разрез по Б-Б на фиг. 3.
На раме i установлен привод 2 подвесного конвейера, имеющий на выходном валу 3 приводную звездочку 4, взаимодействующую с гибким тяговым органом 5 подвесного конвейера. На другом конце приводного вала 3
закреплен круговой копир 6, выполненный с эксцентрично расположенным торцовым пазом 7, в который входит подвижный ролик 8. Ролик 8 жестко связан со штангами 9, на которых установлен подвилсный блок 10 полиспаста. Штанги 9 в свою очередь перемещаются по направляющим //. На неподвижном блоке 12 полиспаста закреплена ветвь гибкой тяги 13, а другой ее конец закреплен на корпусе подвижной в вертикальной плоскости
грузовой каретки 14, перемещающейся по направляющим 15 и несущей вилочный захват 16. На приводном валу 3 установлены две зубчатые полумуфты 17 и 18, выполненные в виде шестерен с торцовыми зубьями. Полумуфта 18 жестко закреплена на приводном валу 3, а полумуфта /7 жестко связана с круговым копиром 6 и имеет возможность осевого перемещения относительно приводного вала 3. На гибком тяговом органе 5 подвесного конвейера установлены подвески 19 с грузом 20, расположенные на одинаковом расстоянии одна от другой. При включении привода 2 приводная звездочка 4 начинает вращаться и перемещает гибкий тяговый орган 5 подвесного конвейера. Приводной вал 3 механизма привода грузовой каретки 14 передает вращение от приводной звездочки 4 круговому копиру 6. Круговой копир с торцовым пазом 7, вращаясь, перемещает на величину своего эксцентриситета ролик 8, который жестко укреплен на щтангах 9 и перемещается по направляющим //. Вместе со штангами 9 перемещается жестко закрепленный на них подвижный блок 10 полиспаста, соверщая возвратно-поступательное движение. Это движение передается через гибкую тягу 13 грузовой каретке 14, перемещающейся по направляющим 15 в вертикальной плоскости. При движении гибкого тягового органа 5 конвейера груз 20, закрепленный на подвеске 19, подходит к направляющим 15. Одновременно по направляющим 15 поднимается грузовая каретка 14, вилочный захват 16 которой поднимает- груз и снимает его с подвески. Дальнейший путь подвеска продолжает без груза, а вилочный захват 16 опускает его на приемный конвейер 21, расположенный под углом к подвесному конвейеру. После установки груза на ковейер 21 каретка 14 вместе с вилочным захватом 16 поднимается, и цикл повторяется. Регулировка момента съема груза производится путем поднятия полумуфты 17 вместе с круговым копиром 6 вдоль оси приводного вала 3 и поворота ее относительно полумуфты 18 на необходимый угол. Предмет изобретения 1. Устройство для передачи щтучных грузов с одного подвесного конвейера на другой, расположенные к нему под углом, включающее гибкий тяговый орган, несущИй подвески с грузом, грузовую каретку, соверщающую возвратно-поступательное движение в вертикальной плоскости по направляющим, привод грузовой каретки с полиспастной системой и установленный на грузовой каретке механизм съема груза с подвески, выполненный в виде подвижного В1илоч.ного захвата, отличающееся тем, что, с целью синхронной передачи груза с конвейера на конвейер, имеющих различные скорости движения, механизм привода грузовой каретки выполнен в виде приводного вала, на одном конце которого закреплена звездочка, взаимодействующая с гибким тяговым органом подвесного конвейера, а на другом установлен круговой копир, снабженный роликом, жестко связанным с подвижным блоком полиспаста, свободная ветвь которого прикреплена к грузовой каретке. 2. Устройство по п. 1, отличающееся тем, что, с целью регулировки момента съема груза во время движения конвейеров, на приводном валу установлены две полумуфты, выполненные в виде шестерен с торцовыми зубьями, причем одна из полумуфт жестко связана с круговым копиром и имеет возможность осевого перемещения вдоль приводнЬго вала, а ругая - жестко закреплена на нем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной конвейер для транспортировки длинномерных грузов | 1981 |
|
SU988682A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| ПОДВЕСНОЙ ГРУЗОНЕСУЩИЙ КОНВЕЙЕРвсгсо:ЗСНАЯ;;:::;';Е:1ш::^ .'ЕКА | 1970 |
|
SU284700A1 |
| Устройство для захвата и передачи штучных грузов с конвейера на конвейер | 1977 |
|
SU663644A1 |
| Конвейер для транспортировки и перегрузки штучных грузов | 1972 |
|
SU540779A1 |
| ПОДВЕСНОЙ ПРОСТРАНСТВЕННЫЙ КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ ИЗДЕЛИЙ | 1966 |
|
SU184722A1 |
| Устройство для передачи изделий с одного конвейера на другой | 1983 |
|
SU1097543A1 |
| Подвесной конвейер | 1990 |
|
SU1728091A1 |
| Устройство для электротренировки радиоэлектронных изделий | 1989 |
|
SU1647938A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ГРУЗА | 2002 |
|
RU2223216C1 |