Изобретение относится к грузоподъемному оборудованию, в частности к устройствам для складирования с максимальным заполнением объема накопления и механизированной подачей штучных грузов к месту их загрузки и выгрузки.
Цель изобретения - повышение надежности. .
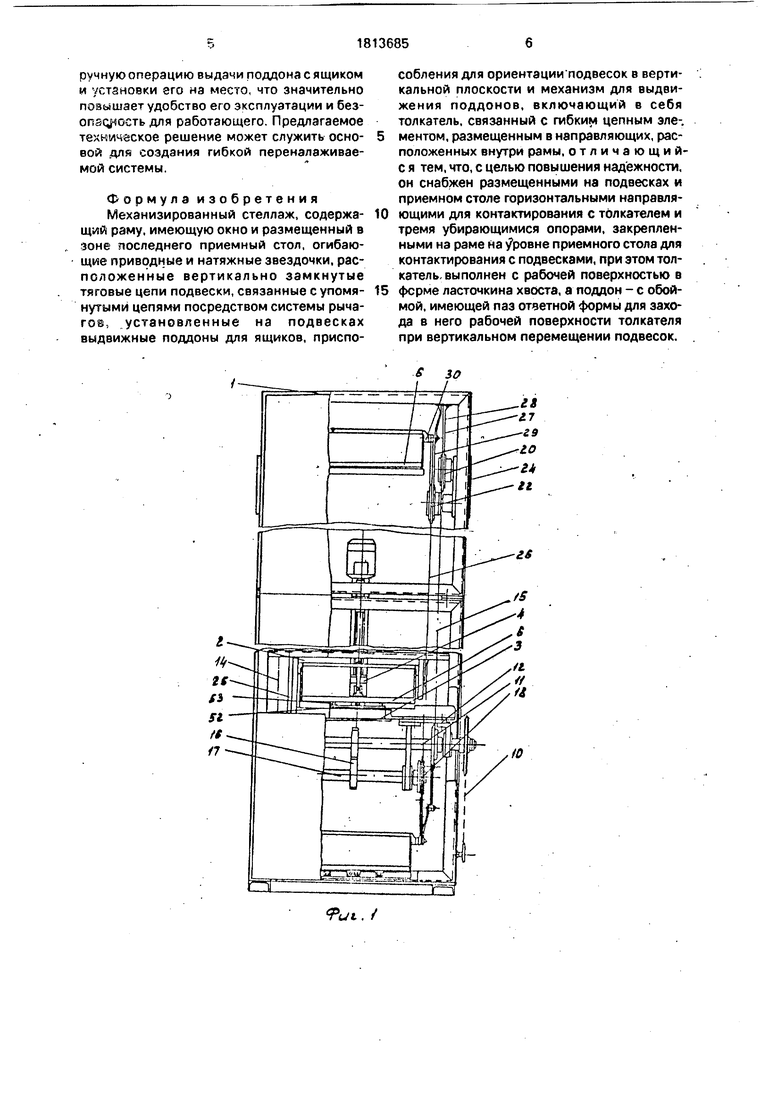
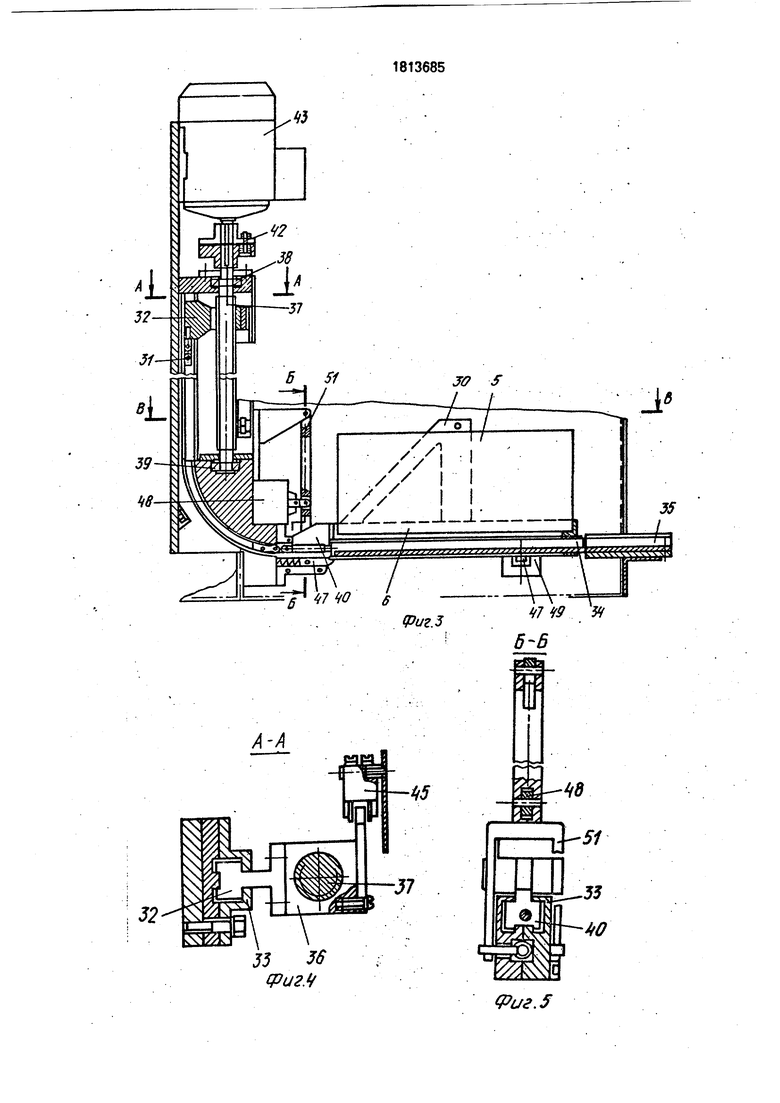
На фиг. 1 показан механизированный стеллаж, вид спереди; на фиг. 2 - то же, вид сбоку; на фиг. 3 - механизм извлечения и установки ящиков; на фиг. 4 - сечение А-А на фиг. 4; на фиг. 5 - сечение Б-Б на фиг. 3; на фиг. б - сечение В-В на фиг. 3.
Механизированный стеллаж состоит из рамы 1, обшитой листовым материалом с
окном 2 и приемным столом 3. Внутри рамы 1 установлен механизм 4 извлечения и установки ящиков 5 с поддонами 6.
Привод 7 стеллажа состоит из электродвигателя 8, редуктора 9 и цепной передачи
10. взаимодействующей с приводным валом
11. на котором сидят приводные звездочки 12 и 13, взаимодействующие в свою очередь с тяговыми цепями 14 и 15. Приводной вал 11 соединен шестеренчатой передачей 16с приводным валом 17дна котором сидят ведомые звездочки 18 и 19.
Натяжные звездочки 20 и 21 цепей 14 и 15 и натяжные ведомые звездочки 22 и 23 установлены в общей каретке 24. Приводные цепи 14 и 15 и ведомые цепи 25 и 26
оо
Сд
00 СП
объединены шарнирно рычагами 27,28 и 29. Рычаг 29 снабжен ползушкой, на которой закреплена подвеска 30 с поддоном б и ящиком 5,
Механизм 4 извлечения и установки ящиков 5 с поддонами 6 выполнен в виде приводного гибкого звена, например, втулочно-роликовой цепи 31, приводимой в движение ползушкой 32 по направляющим 33,34 и 35. Направляющие 33 одновременно являются корпусом механизма 4, направляющие 34 установлены в подвесках 30, а направляющие 35 - на приемном столе 5.
Ползушка 32 через гайку 36 связана с приводным винтом 37, сидящим в подщип- никах 38 и 39.
Втулочио-роликовая цепь 31 шарнирно связана с толкателем 40, выполненным, например, в форме ласточкина хвоста, и перемещающимся вместе с втулочно-роликовой цепью 31 по направляющим 33, 34 и 35, а поддон 6 ящика 5 снабжен обоймой 41 для взаимодействия с толкателем 40 втулочно- роликовой цепи 31.
Приводной винт 37 через муфту 42 связан с электродвигателем 43.
Для ограничения хода гайки 36 предусмотрены конечные выключатели 44 и 45.
Ящик 5 снабжен набором пластин 46 для набора кода для остановки привода 7 стеллажа по сигналу кодосчитывателя (не показан).
Три убирающиеся опоры механизма 4 извлечения и установки ящиков 5 расположены в горизонтальной плоскости, выполнены в виде штырей 47, взаимодействующих с магнитами 48, 49 и 50, и предназначены для удержания подвесок 30.- . .
Для втягивания штырей 47 перед началом поиска нужного ящика магнит48 связан со штырем 47 через вилку 51, магниты 49 и 50 с двумя другими штырями 47-напрямую.
Поддоны 6 снабжены полозьями 52 и 53 для осуществления движения поддонов по направляющим 54 и 55, установленным в подвесках 30, и направляющим 56 и 57, установленным на приемном столе 5.
Механизированный стеллаж работает следующим образом.
От электродвигателя 8 привода 7 через редуктор 9 и цепную передачу 10 вращение передается на приводной вал 11 со звездочками 12 и 13, а через шестеренчатую передачу 16 - на приводной вал 17 со звездочками 18 и 19. Поскольку передаточное отношение шестеренчатой передачи 16 равно 1:1, а звездочки 12 и 13, 18 и 19 выполнены одного диаметра, то цепи 14 и 15, 25 и 26 перемещаются синхронно. Соответственно натяжное устройство, установленное в каретке 24 и включающее Звездочки 20 и 21, 22 и 23, выполненные одного диаметра с приводными звездочками 12 и 13,18 и 19, вращается с той же скоростью. Система рычагов 27, 28 и 29 обеспечивает параллельное перемещение подвесок 30 с лежащими на них поддонами 6 с ящиками 5. Для остановки и извлечения нужного ящика 5 из стеллажа на приемный стол 3
набирают соответствующий код и кодосчи- тыватель отыскивает необходимый ящик.
Электромагниты 49 и 50 напрямую, а электромагнит 48 через вилку 51 выдвигают три штыря 47, на которые садится подвеска
5 30 с найденным ящиком 5. Таким образом фиксируют положение подвески 30 от вертикальных перемещений. Перемещение подвески 30 в горизонтальной плоскости ограничено направляющими 33 и 35, которые
0 вместе с направляющими 34 создают единую направляющую для перемещения толкателя 40 механизма 4 извлечения и установки.
Если команды на извлечение ящика 5 от
5 кодосчитывателя нет, то подвески 30 перемещаются относительно толкателя 40 не за- держиваясь, т.е. толкатель 40 проскальзывает через обойму 41 беспрепят- ственно. Как только от кодосчитывателя по0 ступает команда на остановку требуемого ящика 5 у окна 2, электромагниты 48,49 и 50 выдвигают три штыря 47 и фиксируют подвеску 30 от вертикального перемещения. При остановке подвески 30 поддон 6 с уста5 новленным на нем ящиком 5 будет жестко связан толкателем 40 через обойму 41. При остановке подвески 30 включается электродвигатель 43 и через муфту 42 начинает вращать приводной винт 37, сидящий в
0 подшипниках 38 и 39, тем самым приводя в движение вдоль приводного винта 37 гайку 36, которая в свою очередь приводит в движение по направляющим 34 ползушку 32. Ползушка 32 связана с втулочно-роликовой
5 цепью 31 (выполняющей функцию гибкого приводного звена), которая ступенчатым концом толкателя 40, выполненным в форме ласточкина хвоста, входит в зацепление с обоймой 41 поддона 6. Совместное переме0 щение толкателя 40 по направляющим 33, 34 и 35 и поддона 6 на фторопластовых полозьях 52 и 53 по направляющим 54 и 55, 56 и 57 осуществляют в зависимости от направления движения гайки 36 либо на при5 емный стол 3, либо на подвеску 30. Крайние положения гайки 36 ограничены конечными выключателями 44 и 45.
Технико-экономическая эффективность
использования предлагаемого механизированного стеллажа позволяет ликвидировать
ручную операцию выдачи поддона с ящиком и установки его на место, что значительно повышает удобство его эксплуатации и без- опафоеть для работающего. Предлагаемое техническое решение может служить основой для создания гибкой переналаживаемой системы.
Формула изобретения Механизированный стеллаж, содержащий раму, имеющую окно и размещенный в зоне последнего приемный стол, огибающие приводные и натяжные звездочки, расположенные вертикально замкнутые тяговые цепи подвески, связанные с упомянутыми цепями посредством системы рычагов, .установленные на подвесках выдвижные поддоны для ящиков, приспособления для ориентации подвесок в вертикальной плоскости и механизм для выдвижения поддонов, включающий в себя толкатель, связанный с гибким цепным эле-.
ментом, размещенным в направляющих, расположенных внутри рамы, отличающий- с я тем, что, с целью повышения надёжности, он снабжен размещенными на подвесках и приемном столе горизонтальными направляющими для контактирования с толкателем и тремя убирающимися опорами, закрепленными на раме на Уровне приемного стола для контактирования с подвесками, при этом толкатель, выполнен с рабочей поверхностью в
форме ласточкина хвоста, а поддон - с обоймой, имеющей паз ответной формы для захода в него рабочей поверхности толкателя при вертикальном перемещении подвесок.


Использование: грузоподъемное оборудование, в частности, к устройствам для складирования с максимальным заполнением объема накопления и механизированной подачи штучных грузов к месту их загрузки и выгрузки. Сущность изобретения: механизированный стеллаж содержит раму, имеющую окно и размещенный в зоне последнего приемный стол, огибающие приводные и натяжные звездочки, расположенные вертикально замкнутые тяговые цепи подвески, связанные с упомянутыми цепями посредством системы рычагов, установленные на подвесках выдвижные поддоны для ящиков, приспособления для ориентации подвесок в вертикальной плоскости и механизм для выдвижения поддонов, включающий в себя толкатель, связанный с гибким цепным элементом, размещенным в направляющих, расположенных внутри рамы. Отличие механизированного стеллажа от известного состоит в том, что он снабжен размещенными на подвесках и приемном столе горизонтальными направляющими для контактирования с толкателем и тремя убирающимися опорами, закрепленными на раме на уровне приемного стола, для контактирования с подвесками, при этом толкатель выполнен с рабочей поверхностью в форме ласточкина хвоста, а поддон - с обоймой, имеющей паз ответной формы для захода в него рабочей поверхности толкателя при вертикальном перемещении подвесок. 6 ил. ел с
Pui. /
Put.l
| Элеваторный стеллаж | 1986 |
|
SU1379188A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| СПОСОБ ВЫРАБОТКИ ХЛЕБНОГО КВАСА | 2015 |
|
RU2587306C1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
