Изобретение относится к автоматике и вычислительной технике и может быть использовано в автоматизированных системах управления для ввода информации о состоянии двухпозиционных датчиков.
Известно устройство, содержащее три блока памяти, коммутатор, счетчик адреса, регистр сдвига, схему сравнения, триггер и группу элементов И.
Недостатком устройства является его сложность, обусловленная наличием группы блоков памяти.
Наиболее близким к заявляемому по технической сущности является устройство, содержащее два регистра, две группы сумматоров по модулю два, шифратор, дешифратор и коммутатор. В первый регистр заносится текущее состояние датчиков, которое сравнивается с предыдущим, хранящимся во втором регистре. Шифратор формирует код адреса сработавшего датчика, коммутатор выдает его состояние. Дешифратор управляет последовательностью формирования адресов сработавших датчиков. Область применения устройства ограничивается невозможностью оперативного изменения последователености опроса датчиков.
Цель изобретения - расширение области применения устройства путем обеспеченияоперативногоизмененияпоследовательности опроса датчиков.
Поставленная цель достигается тем, что в устройство для ввода информации, содержащее два регистра, две группы сумматоров по модулю 2, шифратор, дешифратор и коммутатор, выход которого информацион; ный выход устройства, а информационные
XJ
сл о
00 х|
ч
входы подключены к первой группе входов сумматоров первой группы и выходам первого регистра, информационный вход которого подключен к выходам датчиков, синхровход - первый синхровход устройства, а вход сброса - соответствующий вход устройства и подключен к входу сброса второго регистра, синхровход которого - второйсинхровходустройства, информационный вход подключен к выходам сумматоров второй группы, а выход- к входам второй группы сумматоров первой и второй групп, первая группа входов сумматоров второй группы которых подключена к выходу дешифратора, введены второй коммутатор и третья группа сумматоров по модулю два, выходы которых подключены к входу дешифратора, управляющим входам первого коммутатора и являются адресным выходом устройства, первая группа входов подключена к выходу группы шифратора, а вторая - управляющий вход устройства и подключена к управляющему входу второго коммутатора, выход которого соединен с входом шифратора, а входы первой и второй групп соответственно подключены к выходам сумматоров первой группы, причем выход шифратора соединен с управляющими входами обоих регистра.
Новыми существенными признаками заявляемого устройства являются введение второго коммутатора, третьей группы сумматоров по модулю 2 и связей, отражающих новую организацию взаимодействия между элементами устройства.
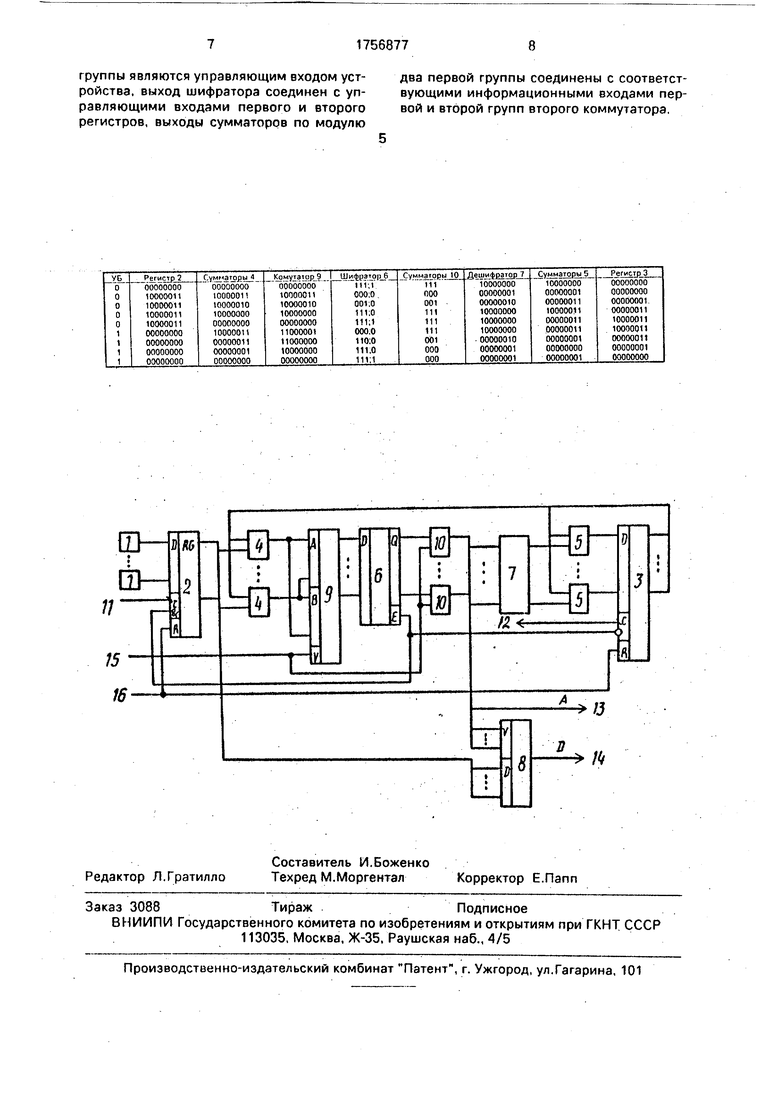
На чертеже изображена функциональная схема устройства.
Устройство содержит группу двухпози- ционных датчиков 1, первый 2 и второй 3 регистры, первую и вторую группы сумматоров соответственно 4 и 5 по модулю два, шифратор 6, дешифратор 7, первый 8 и второй 9 коммутаторы, третью группу сумматоров 10 по модулю два, первый 11 и второй 12 синхровходы, адресный 13 и информационный 14 выходы, входы управления 15 и сброса 16.
Выходы двухпозиционных датчиков 1 группы соединены с информационным входом первого регистра 2, синхровход которого соединен с первым синхровходом 11 устройства, управляющий вход - с выходом шифратора 6 и управляющим входом второго регистра 3, вход сброса - с входом сброса регистра 3 и устройства 16, а выход - с информационным входом второго коммутатора 8 и входами первой группы сумматоров 4 по модулю два первой группы, входы второй группы которых подключены к выходу регистра 3 и входам второй группы сумматоров 5 второй группы, а выходы подключены к соответствующим входам первой и второй групп второго коммутатора 9, управляющий вход которого подключен к
входам второй группы сумматоров 10 третьей группы и управляющему входу 15 устройства, а выход - к входу шифратора 6, выход группы которого соединен с входами первой группы сумматоров 10, выходы кото0 рых подключены к управляющему входу коммутатора 8, адресному выходу 13 устройства и входу дешифратора 7, выход которого подключен к входам первой группы сумматоров 5, выходы которых соединены с
5 информационным входом регистра 3, синхровход которого подключен к второму синх- ровходу 12 устройства, а выход коммутатора 8 соединен с информационным выходом 14 устройства.
0 Посинхровходам 11 и 12 поступают синхроимпульсы соответственно СИ1, СИ2. С адресного выхода 13 поступают двоичные коды А адресов сработавших датчиков, с информационного выхода 14- бинарные ко5 ды состояния этих датчиков. По управляющему входу 15 поступает сигнал задания опроса датчиков по убыванию значений их адресов УБ, по входу 16 сброса - сигнал начальной установки (НУ).
0 Реализованный вариант предлагаемого устройства предназначен для сопряжения УЭВМ с восемью двухпозиционными датчиками. Регистры 2 и 3 выполнены на основе К555ТМ8, сумматоры 4, 5 и 10 - на К555ЛП5,
5 шифратор 6 - на К555ИВ1, дешифратор 7 - на К555ИД7, коммутатор 8 - на К555КП15, коммутатор 9 - на К555КП11.
Устройство работает следующим образом:
0 В начальное состояние устройство приводится сигналом НУ, по которому регистры 2 и 3 устанавливаются в нулевое состояние. Сумматоры 4 осуществляют сравнение состояний соответствующих разрядов регист5 ров 2 и 3, После сброса на выходах всех сумматоров 4 устанавливается О, в результате чего шифратор 6 устанавливает 1 на своем выходе запроса, что разрешает запись в регистр 2 и блокирует запись в ре0 гистр 3. При опросе датчиков по возрастанию значений их адресов сигнал УБ устанавливается в О, при опросе по убыванию- в 1.
По заднему фронту СИ 1 осуществляется
5 запись в регистр 2 состояния датчиков 1, При изменении состояния датчиков соответственно изменяется и состояние регистра 2. По несовпадению соответствующих разрядов регистров 2 и 3 на тех выходах сумматоров 4, которые соответствуют этим
разрядам, устанавливается 1. При нулевом значении сигнала УБ код, сформиро ван- ный .сумматорами 4, передается коммутатором 9 на вход шифратора 6 без изменений. Сигнал запроса шифратора сбрасывается, блокируя тем самым изменение состояния регистра 2 по следующему CI/I1 и разрешая модификацию регистра 3 по СИ2, а на информационном выходе шифратора устанавливается код адреса облада- ющего наибольшим приоритетом сработавшего датчика. Этот код повторяется сумматорами 10 и по нему дешифратор 7 устанавливает 1 на соответствующем этому коду своем выходе, а коммутатор 8 подключает выход соответствующего разряда регистра 2 к выходу 14,
По СИ2 с выхода 13 считывается код адреса обладающего наибольшим приоритетом сработавшего датчика, а с выхода 14 - значение его состояния. По заднему фронту СИ2 в регистр 3 заносится состояние выходов сумматоров 5, которые выполняют функцию управляемых инверторов. Тем самым разряд регистра 3, соответствующий датчику, код адреса которого присутствует на выходе 13, приводится в состояние, равное состоянию соответствующего ему разряда регистра 2, а прочие разряды регистра 3 сохраняют свое предыдущее состояние. Вследствие этого выходы сумматоров 10, дешифратора 7 и коммутатора 8 устанавливаются в состояние, соответствующее следующему по приоритету сработавшему датчику, которое считывается по следующему СИ2, Так осуществляется опрос датчиков и выдача кода адреса и состояния датчиков, сработавших за время, истекшее с предыдущего считывания их состояния.
После того, как регистр 3 окончательно будет приведен в состояние, соответствующее состоянию регистра 2, на выходах всех сумматоров 4 вновь установится О, и шифратор 6 выдает сигнал запроса , что разрешит запись по СИ1 в регистр 2 нового состояния датчиков 1. Затем синхронно СИ2 процедура выдачи кода адреса и состояний датчиков, изменивших свое состояние, повторяется. Если же новое состояние регистра 2 повторит предыдущее состояние регистра 3, то модификация регистра 3 блокируется.
При необходимости опроса сработав- ших-датчиков по убыванию значений их адресов сигнал УБ устанавливается в 1. Коммутатор 9 изменяет порядок подключения выходов сумматоров 4 к входам шифратора 6. Тем самым датчику, обладающему наибольшим приоритетом при нулевом значении УБ, присваивается наименьший приоритет и наоборот. Шифратор б в этом олу чае формирует псевдокод адреса старшего для данного опрОса по приоритету срабо тавшего датчика, а сумматоры 10, также вы
5 полняющие функцию управляемых инверторов, восстанавливают его истинный код. Пример последовательности формирования кодов адресов при срабатывании за цикл опроса первого, второго и последнего
10 датчиков и опросе их как по возрастанию, так и по убыванию, показан в таблице.
Таким образом в предлагаемом устройстве осуществляется выдача кода адреса и состояния сработавших датчиков в последо15 вательности как возрастания, так и убывания значений их адресов.
Формула изобретения
0 Устройство для ввода информации, содержащее первый и второй регистры, первую и вторую группы сумматоров по модулю два, шифратор, дешифратор и первый коммутатор, выход которого является информа5 ционным выходом устройства, выходы первого регистра соединены с информационными входами первого коммутатора и входами первой группы сумматоров по модулю два первой группы, информационные
0 входы первого регистра являются информационными входами устройства для подключения двухпоз и ционных датчиков, синхровход первого реги стр а является первым синхровходог$Густр ойства, входы сбро5 са первого и р1ги йтр;Ыз являются входом сброса устройства, синхровход второго регистра является вторым сйнхровхо- дом устройства, информационные входы второго регистра соединены с выходами
0 сумматоров по модулю два второй группы, выходы дешифратора соединены с входами первой группы сумматоров по модулю два второй группы, выходы Bfoporo регистра соединены с входами второй группы суммато5 ров по модулю два первой и второй групп, отличающееся тем, что, с целью расширения области применения устройства путем обеспечения изменения последовательности опроса датчиков, в устройство
0 введены второй коммутатор и третья группа сумматоров по модулю два, выходы которых соединены с адресными входами первого коммутатора, входами дешифратора и являются адресными выходами устройства, вхо5 ды первой группы сумматоров по модулю два третьей группы соединены с выходами группы шифратора, входы которого соединены с выходами второго коммутатора, управляющий вход котороТо и сходи второй группы сумматоров по модулю /-па третьей
группы являются управляющим входом устройства, выход шифратора соединен с управляющими входами первого и второго регистров, выходы сумматоров по модулю
два первой группы соединены с соответствующими информационными входами первой и второй групп второго коммутатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки данных | 1990 |
|
SU1784967A1 |
| Устройство для поиска свободных зон памяти | 1990 |
|
SU1829046A1 |
| Устройство для сортировки данных | 1989 |
|
SU1695290A1 |
| Устройство для управления регенерацией динамической памяти со свободными зонами | 1990 |
|
SU1739388A1 |
| Устройство для формирования адресов регенерации динамической памяти | 1989 |
|
SU1709394A1 |
| Устройство для ввода информации | 1988 |
|
SU1553969A1 |
| Устройство для адресации памяти | 1989 |
|
SU1656543A1 |
| СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ | 1991 |
|
RU2043659C1 |
| Устройство для сбора данных о работе ЭВМ | 1982 |
|
SU1121679A1 |
| Устройство для сопряжения датчиков с ЭВМ | 1983 |
|
SU1129600A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано в АСУ для ввода информации о состоянии двухпозиционных датчиков. Цель изобретения - расширение области применения устройства путем обеспечения оперативного изменения последовательности опроса датчиков. Устройство содержит группу двухпозиционных датчиков (1). два регистра (2, 3), группы сумматоров по модулю 2, (4, 5, 10), приоритетный шифратор (6), дешифратор (7) и два коммутатора (8, 9). В устройстве осуществляется запоминание текущего состояния датчиков и сравнение его с предыдущим. При выявлении изменения состояния датчиков выдаются коды значения их адресов и состояний в последовательности возрастания значений этих адресов или их убывания. 1 ил., 1 табл.
| Устройство ввода-вывода информации | 1983 |
|
SU1226429A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для ввода информации | 1988 |
|
SU1553969A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
