Изобретение относится к электротехнике, а именно к силовой преобразовательной технике, и может быть использовано при управлении преобразователем частоты rfa базе инверторов напряжения, питающими системы частотно-регулируемого электропривода
Известны алгоритмы 120- и 150-градусного управления регулируемыми трехфазными преобразователями, которые позволяют формировать приемлемое по спектральному составу выходное напряжение АЙН, однако не обеспечивают независимости формы кривой выходного сигнала от параметров нагрузки
Известен также 180-градусный способ управления трехфазным преобразователем, обеспечивающий инвариантность формы выходной кривой от нагрузки Способ базируется на модуляции крайних на полупериодах тактовых интервалов модулирующими сигналами управления, от продолжительности которых зависит величина выходного напряжения
Однако непосредственное применение способа управления в системах регулируемого по частоте асинхронного электропривода не позволяет осуществить плавное безударное изменение числа импульсов в выходной полуволне при связанном регулировании частоты и напряжения (уменьшение числа Импульсов при росте частоты)
Целью изобретения является повышение качества процесса регулирования преобразователя за счет плавного безударного изменения формы кривой выходного напряжения.
При управлении по способу при котором основные вентили разных фаз и групп преобразователя периодически включают и выключают с взаимным фазовым сдвигов в 60 эл град в последовательности+А С +В
V|
СЛ
ч
О О СЛ
-А, +С, -В, прит этом для каждого вентиля формируют положительные полупериоды проводимости и отрицательные полупериоды закрытого состояния, каждый из которых состоит из трех тактовых интервалов 60-градусных продолжительностей, на крайних полупериодах тактовых интервалах формируют модулирующие сигналы(импульсы) управления, продолжительность которых определяет величину выходного напряжения преобразователя, в процессе N-кратно- го связанного регулирования частоты F и величины напряжения по закону постоянства отношения величины напряжения к частоте при номинальном (минимальном) питающем напряжении формирование указанных модулирующих сигналов управления на всем диапазоне регулирования, начиная с начальной частоты F0, осуществляют в серединах тактовых подинтервалов
Ео
с продолжительностью т - -г. , причем середины тактовых интервалов синхронизируют с серединой соответствующего центрального тактового подинтервала (при нечетном N) или с концом и началом соответствующих центральных тактовых подинтервалов (при нечетном N), при этом в диапазонах частот F F внутри тактовых интервалов формируют по I модулирующих сигналов управления с продолжительностью
/ 1 , 1§о
F F0 E N пазонах F, F , F i на крайних участках тактовых интервалов формируют сигналы управления с длительностью
, 1 (i-1)(i-2)Eo + Eo 12 FтТРТЁТ УМ
), на частотных диаД а ,жительность остальных (-2)-и сигналов управления определяют в соответстя Ы1г ;
вии с зависимостью
1-1)
oJoTT
значения граничных частот F i и FJ, переходных от одного поддиапазона регулирования к
... -F0E(i-1)N
другому, находят как FI ; /: -Л-р р и
i (, i i ; Со to
F0E(i-1)N
F
где минималь(i-1)(i-2)&o-f-Eo ная (номинальная) и текущая амплитуды питающего преобразователь постоянного напряжения обозначены соответственно как ЕО и Е.
Совокупность соотношений на всем диапазоне регулирования связывающих между собой текущие значения выходной частоты преобразователя, величину питающего напряжения и количество, длительность и местоположение управляющих
сигналов, подаваемых на вентили преобразователя, характеризует собой новый режим проведения приемов способа.
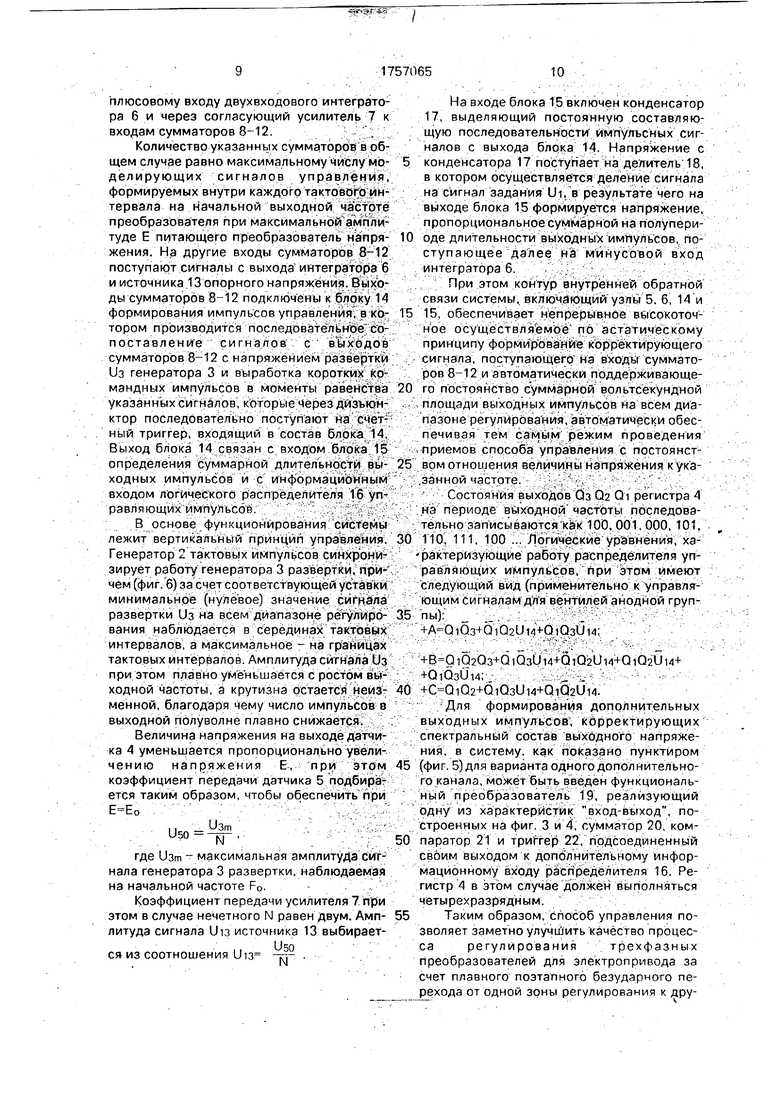
На фиг. 1 представлена силовая схема
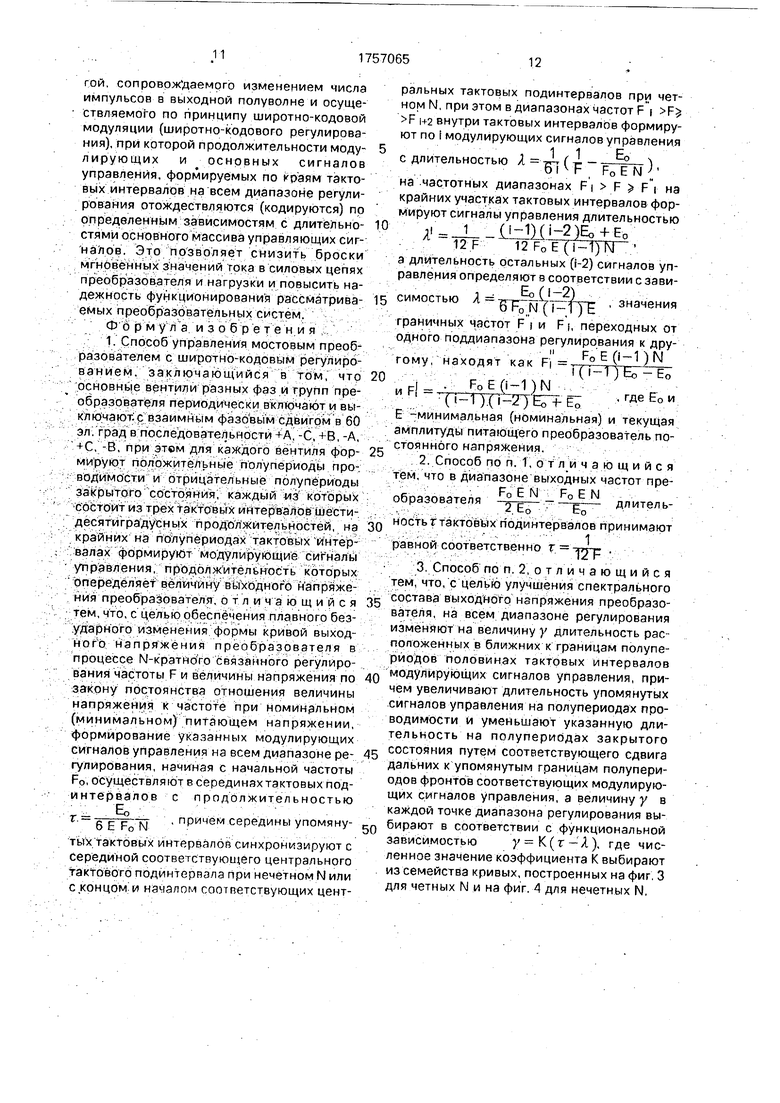
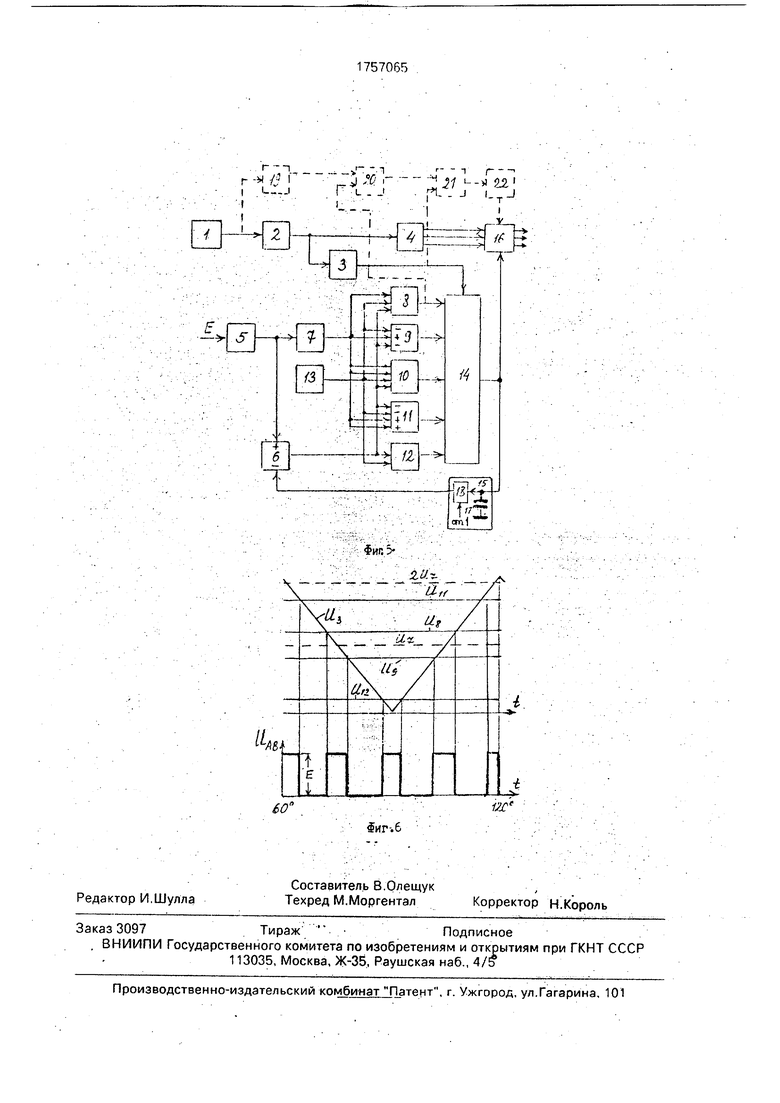
трехфазного мостового преобразователя, выполненного на базе полностью управляемых ключей; на фиг. 2 - временные диаграммы, поясняющие предлагаемый способ управления; на фиг, 3 и 4 - кривые изменения величины коррелирующего коэффициента К; на фиг. 5 - блок-схема системы управления преобразователем; на фиг. 6 - временные диаграммы, поясняющие принцип ее функционирования.
На фиг. 2а в верхней части построена
временная диаграмма формирования управляющего сигнала на вентиль +А анодной группы преобразователя в течение полупериода проводимости на начальной (минимальной) выходной частоте Fo, ниже приведена соответствующая кривая линейного выходного напряжения UAB . Считается, что величина питающего инвертор напряжения при этом имеет номинальную
(минимальную) величину Ео. Принято, что при этом частотный диапазон связанного регулирования частоты и величины выходного напряжения преобразователя по закону постоянства отношения величины
напряжения к частоте равен шести ().
Характерной особенностью базового алгоритма 180-градусного формирования управляющих сигналов является то, что, как следует из верхней кривой (фиг. 2), для каждого из вентилей каждый из полупериод ов проводимости и закрытого состояния разбивается натри тактовых интервала 60-градусной продолжительности, а формирование модулирующих сигналов управления, разноименных с соответствующим полупериодом, продолжительностью которых регулируется величина выходного напряжения преобразователя, осуществляется внутри крайних на полупериодах тактовых интервалах.
При этом на всем диапазоне регулирования модулирующие сигналы управления синтезируют в серединах тактовых подинтервалов, имеющих продолжительность
Ео
1 6 F Fo N
, находящуюся в функциональной зависимости от текущей величины питающего напряжения Е, на которые разбиваются тактовые интервалы. Середины тактовых интервалов в этом случае непрерывно синхронизируются с серединой соответствующего центрального тактового подинтервала (при нечетном значении индекса N) или с концом и началом соответствующих двух центральных тактовых подин- тервалов(при четном N именно этому варианту соответствуют приведенные на фиг. 2 временные диаграммы ())
Как показано стрелками (фиг, 2), процесс регулирования выходной частоты преобразователя при управлении по способу осуществляется двухэтапно путем последовательного плавного перехода от одного режима к другому и обратно. В первом (условно) режиме управления, которому соответствуют формы управляющих сигналов и линейного выходного напряжения (фиг. 2а, в, д), на крайних участках тактовых под- интервалов формируются основные сигналы управления, а продолжительность Я всех модулирующих сигналов управления, количество которых внутри тактовых интервалов равно i, определяется в соответствии с соотношением
1 1 ( 1 Ео ч
F7E7JJ
Регулирование (увеличение) выходной частоты преобразователя при этом осуществляется, как показано стрелками, за счет изменения (уменьшения) длительности крайних основных сигналов управления, что сопровождается идентичным уменьшением крайних и центрального выходных импульсов в полуволне линейного выходного напряжения. Верхние границы подобных режимов наблюдаются на частотах F0E(-1)N
Гр-1 )to -Ео
F
на крайних импульсов снижается до близких к нулю значений
Второй режим управления (фиг. 26, г) характеризуется формированием на краях тактовых интервалов модулирующих сигналов управления с продолжительностью
J0-1)(i-2)Eo +ЕО
12 F12 (1-1 )
А
а длительность остальных (I-2)- и модулирующих сигналов управления при этом опре- Ео(.-2)
деляется как Я
Верхней
E (T-1JN границей такого режима для каждых конкретных i являются частоты
F -.. f.oNEji-1)
F|-(i-1)(i-2J +i;Значение индекса i, тождественное количеству модулирующих сигналов упрабле- ния, формируемых внутри тактовых интервалов, при этом последовательно уменьшается с максимального значения, имеющего место на начальной выходной частоте (фиг 2а для и при , также на фиг. 26, далее для сигналов, приведенных на фиг 2в, г и i 2 на фиг 2д),
на которых величи0
5
0
Выполнение на всем диапазоне регулирования указанных соотношений реализует при этом постоянство отношения величины выходного напряжения преобразователя к частоте - и обеспечивает тем самым один из наиболее экономичных законов регулирования асинхронных электродвигателей питающихся от преобразователей рассмат риваемого класса,
Для конкретного анализируемого режима (, ) с ростом частоты преобразователя первой граничной частотой является F F0(I-1)N F0 -5 - 6 30 r 6 ф-Tf-T 5-6-1 29 0- Формирование выходной кривой, типа построенной на фиг. 26, осуществляется в диапа
FO -5-6 30 21
зоне частот F 6-Fe
ОУ р
тТ го
5 Т
4-5 + 1 Далее в диапазоне выходных частот F 6-F 4 Fo-36 18 с .
-д.он - ут F0 форма выходного напряжения соответствует кривой фиг 2в, причем в частотном поддиапазоне F 4-F4
1R
Fo форма напряжения видоизменяется
0
5
0
до кривой, типа построенной на фиг. 2г
На следующем частотном поддиапазоне (фиг 2р) при увеличении частоты центры тактовых подинтереало в, в середине которых формируются модулирующие сигналы управления (два сигнала управления, ) с
11 1 продолжительностью Я -т (-с. )
Ј, Рч
каждый, последовательно сдвигаются к границам тактовых интервалов, благодаря чему, как показано стрелками, уменьшается продолжительность крайних на полупериоде выходных импульсов, снижающаяся до близких к нулю значений одновременно с
F0E N
величиной Я на частоте F 2Ес
(в слу5
0
5
чае F ), что соответствует верхнему пределу диапазона связанного регулирования величины и частоты напряжения Выходное напряжение преобразователя при этом максимально и формируется из последовательности разно- полярных 120-градусных импульсов без пауз.
На этапе регулирования преобразователя от F4 к F 2 для четных N полуволна линейного выходного напряжения формируется из пяти выходных импульсов вплоть до верхней (номинальной) выходной частоты, что приводит к дополнительным потерям на коммуникацию в диапазоне повышенных выходных частот преобразователя Поэтому при четных N с энергетической точки зрения целесообразно, начиная с частоты F осуществлять синхронный
ТЕо
сированный сдвиг модулирующих сигналов к центрам тактовых интервалов до их слияния в единый центральный модулирующий
F0E N
сигнал на частоте F
2 Ее
Координаты середин Ci и Сг, а также Сз и С4 модулирующих сигналов управления внутри каждого положительного полупери- ода в диапазоне изменения частот от F 4 до F при этом изменяются в соответствии с функциональной зависимостью
С1()эл град;
С2(7575E0F
)эл.град;
N h F0 Сз(+Ю5)эл.град;
75FE0
С4(195 -,
)эл.град,
N F0E
Внутри тактовых интервалов 180-240 и 300-360 эл.град формирование модулирующих управляющих сишалов осуществляется симметрично. В диапазоне выходных частот F -F 2 длительность А синтезируемых е центрах ук аз анных интервалов модулирующих сигналов управления изменяется вс оответст 1 1Ео
вин с зависимостью л - zrtr к р м с
Для улучшения гармонического состава выходного напряжения преобразователя может быть использован принцип компенсации, заключающийся, как показано пунктиром (фиг. 2), в формировании последовательности дополнительных импульсов, гармоники которой находятся в противофазе с соответствующими паразитными гармоническими составляющими основного Массива выходных импульсов и способствует тем самым снижению (компенсации) амплитуд паразитных гармоник в результирующей выходной кривой. При этом с целью уменьшения амплитуд паразитных гармоник, близких к основной, на всем диапазоне регулирования целесообразно в диапазоне выходных частот преобFO Е N Fo Е N разователя- -g- - -р--
-е-t -- продолжительЕО&о
ность тактовых подынтервалов т принимать
1 равной т -гп-г
Для формирования последовательности дополнительных выходных импульсов с продолжительностью должна изменяться (фиг 2я) на указанную величину у длительность соответствующих модулирующих сиг- Н а лрв управления , расположённых в ближних к; грани цчмтюлупериодов полови0
5
0
5
0
5
0
5
0
5
при этом из соотношения U вых
нах тактовых интервалов. При этом длительность сигналов управления, расположенных внутри полупериодов проводимости, увеличивается на величину у , а продолжительность модулирующих сигналов управления внутри полулерйодов закрытого состояния уменьшают на указанную величину. Отмеченное изменение продолжительностей модулирующих сигналов управления осуществляется в обоих случаях путем соответствующего сдвига дальних к границам полупериодов фронтов соответствующих сигналов управления.
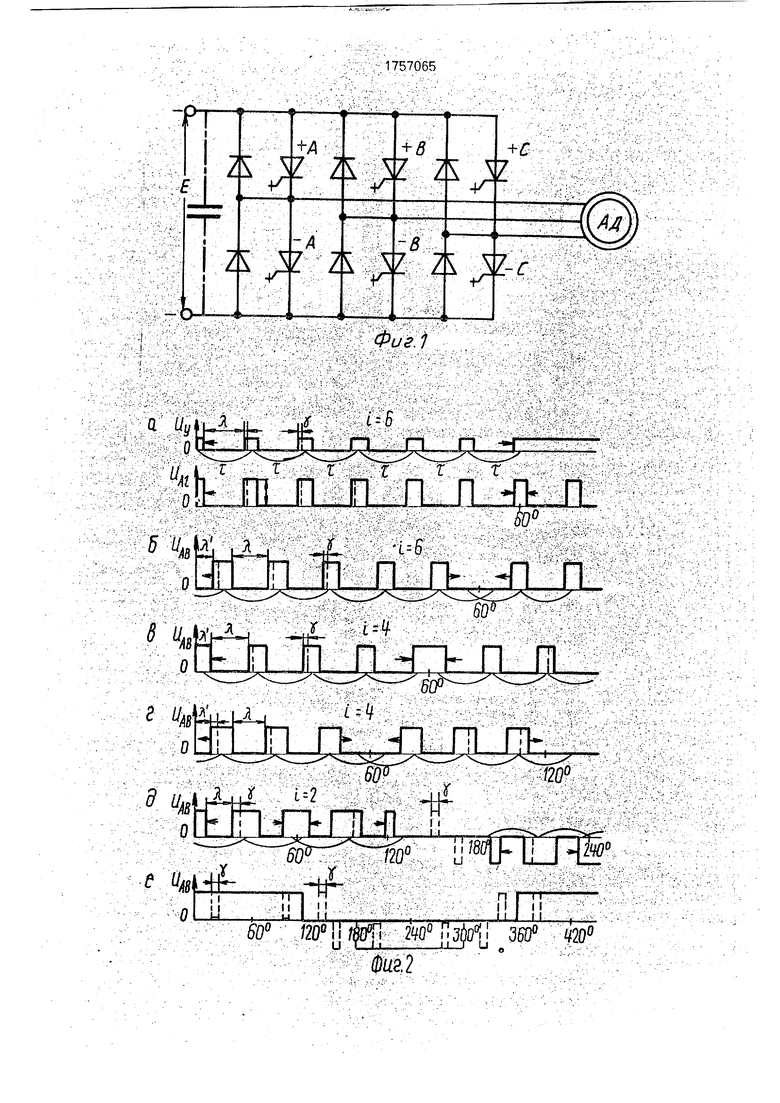
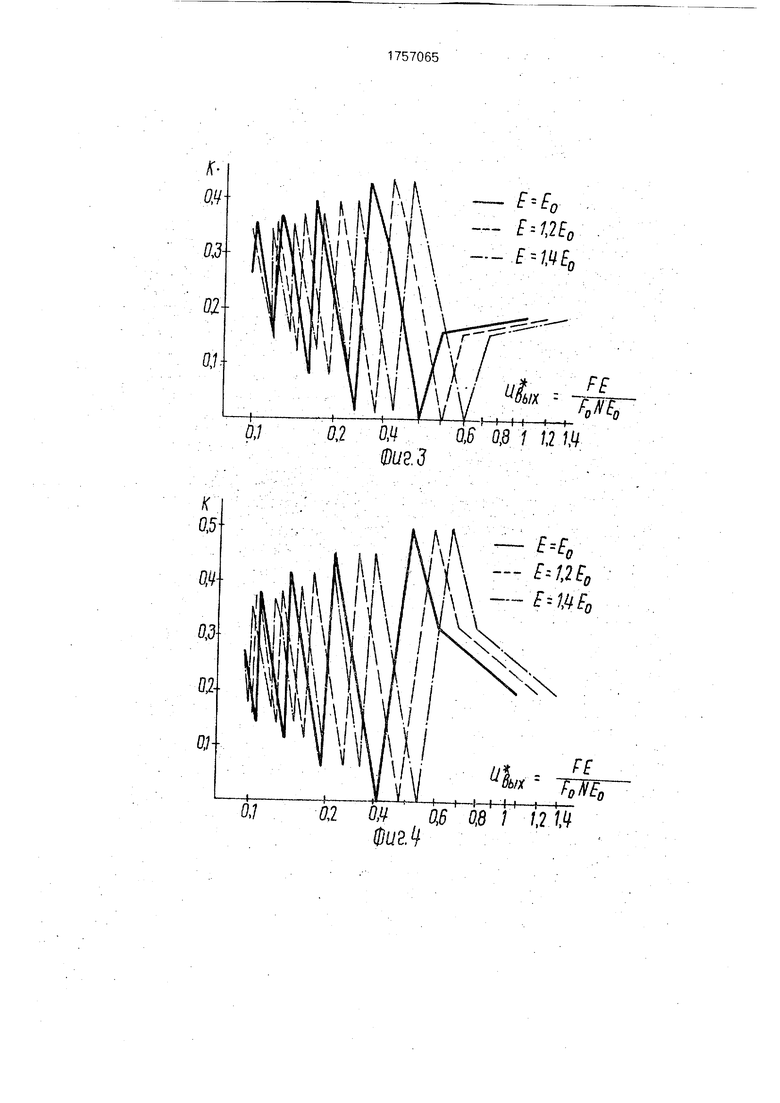
Величина у в каждой точке диапазона регулирования выбирается в соответствии с функциональной зависимостьюу К ( г - Я) ,где численное значение сопрягающего коэффициента К выбирается для соответствующей вели- чины относительного / выходного напряжения U вых из семейства универсальных кривых, построенных для соответствующих значений Е/Ео для четных N (фиг. 3) и нечетных J (фиг. 4). Взаимбсвязь между текущими значениями выходной ча стоты F и отложенной (фиг. 3 и 4) по оси абсцисс относительной величиной -выходного напряжения преобразователя U пых определяется
FE
ТШ Количество дополнительных выходных импульсов в выходной полуволне последовательно плавно уменьшается с ростом выходной частоты преобразователя. Выбор значения у по указанному алгоритму обеспечивает при этом на всем диапазоне регулирования полное устранение из спектра кривой выходного напряжения преобразо- пятой гармонической составляющей, создающей в процессе работы максимальный тормозной момент асинхронным двигателем, питающимся от преобразователей, и являющейся позтбм у наиболее нежелательной. Также заметно снижается при этом амплитуда сед ьмой гармонической составляющей.
Принцип функционирования систем управления, реализующих способ управления, рассмотрим на примере функциональной схемы устройства (фиг.5) и временных диагт рамм егб работы (фиг. 6). Блок 1 задания выходной частоты связан с генератором 2 тактовых импульсов, частота следования которых на всем диапазоне регулирования в 12 раз превышает выходную частоту преобразователя. Генератор 2 соединен своим выходом с генератором 3 развертывающего пилообразного напряжения и трехразрядным регистром 4. Датчик 5 амплитуды питающего напряжения присоединен к
плюсовому входу двухвходового интегратора 6 и через согласующий усилитель 7 к входам сумматоров 8-12
Количество указанных сумматоров в общем случае равно максимальному числу мо- делирующих сигналов управления, формируемых внутри каждого тактового интервала на начальной выходной ча стоте преобразователя при максимальнойчампли- туде Е питающего преобразователь напряжения. На другие входы сумматоров 8-12 поступают сигналы с выхода интегратора 6 и источника 13 опорного напряжения. Выходы сумматоров 8-12 подключены к блоку 14 формирования импульсов управления, в котором производится последовательное сопоставление сигналов с выходов сумматоров 8-12 с напряжением развертки Уз генератора 3 и выработка коротких командных импульсов в моменты равенства указанных сигналов, которые через дизъюн- ктор последовательно поступают на счетный триггер, входящий в состав блока 14, Выход блока 14 связан с входом блока 15 определения суммарной длительности выходных импульсов и с информационным входом логического распределителя 16 управляющих импульсов
В основе функционирования системы лежит вертикальный принцип управления. Генератор 2 тактовых импульсов синхронизирует работу генератора 3 развертки, причем (фиг 6) за счет соответствующей уставки минимальное (нулевое) значение сигнала развертки Us на всем диапазоне регулирования наблюдается в серединах тактовых интервалов, а максимальное - на границах тактовых интервалов Амплитуда сигнала Us при этом плавно уменьшается с ростом выходной частоты, а крутизна остается неизменной, благодаря чему число импульсов в выходной полуволне плавно снижается.
Величина напряжения на выходе датчика 4 уменьшается пропорционально увеличению напряжения Е, при этом коэффициент передачи датчика 5 подбирается таким образом, чтобы обеспечить при
, . Цзпп U5Q-N-.
где Dam - максимальная амплитуда сит- нала генератора 3 развертки, наблюдаемая на начальной частоте F0
Коэффициент передачи усилителя 7 при этом в случае нечетного N равен двум. Амплитуда сигнала 1Нз источника 13 выбираетj Uso ся из соотношения Ui3 -г.На входе блока 15 включен конденсатор 17, выделяющий постоянную составляющую последовательности импульсных сигналов с выхода блока 14 Напряжение с конденсатора 17 поступает на делитель 18, в котором осуществляется деление сигнала на сигнал задания Ui, в результате чего на выходе блока 15 формируется напряжение, пропорциональное суммарной на полупериоде длительности выходных импульсов, поступающее далее на минусовой вход интегратора 6
При этом контур внутренней обратной связи системы, включающий узлы 5, 6, 14 и
15, обеспечивает непрерывное высокоточное осуществляемое по астатическому принципу формирование корректирующего сигнала, поступающего на входы сумматоров 8-12 и автоматически поддерживающего постоянство суммарной вольтсекундной площади выходных импульсов на всем диапазоне регулирования, автоматически обеспечивая тем самым режим проведения приемов способа управления с постоянством отношения величины напряжения к указанной частоте
Состояния выходов Оз Q2 Qi регистра 4 на периоде выходной частоты последовательно записываются как 100,001,000, 101,
110, 111. 100 Логические уравнения, ха- рактерйзующие работу распределителя управляющих импульсов, при этом имеют следующий вид (применительно к управляющим сигналам для вентилей анодной группы)
+A -QiQ3+QiQ2UM+QiQ3Ui4(
+B QiQ2Q3+QiQ3Ui4+QiQ2Ui4+QiQ2Ui4+
+QiCbUi4,„ .
+C QiQ2+QiQ3Ui4+QiQ2Ui4.
Для формирования дополнительных выходных импульсов, корректирующих спектральный состав выходного напряжения, в систему, как показано пунктиром
(фиг 5) для варианта одного дополнительного канала, может быть введен функциональный преобразователь 19, реализующий одну из характеристик вход-выход, построенных на фиг 3 и 4, сумматор 20 компаратор 21 и триггер 22, подсоединенный своим выходом к дополнительному информационному входу распределителя 16 Регистр 4 в этом случае должен выполняться четырехразрядным
Таким образом, способ управления позволяет заметно улучшить качество процесса регулирования трехфазных преобразователей для электропривода за счет плавного поэтапного безударного перехода от одной зоны регулирования к другой, сопровождаемого изменением числа импульсов в выходной полуволне и осуществляемого по принципу широтно-кодовой модуляции (широтно-кодового регулирования), при которой продолжительности моду- лирующих и основных сигналов управления, формируемых по краям тактовых интервалов на всем диапазоне регулирования отождествляются (кодируются) по определенным зависимостям с длительностями основного массива управляющих сигналов. Это позволяет снизить броски мгновенных значений гока в силовых цепях преобразователя и нагрузки и повысить надежность функционирования рассматриваемых преобразовательных систем. Формула изобретения 1. Способ управления мостовым преобразователем с широтно-кодовым регулированием, заключающийся в том, что основные вентили разных фаз и групп преобразователя периодически включают и выключают, с взаимным фазовым сдвигом в 60 эл. град в последовательности +А, -С, - В, -А, +С, -В, при этом для каждого вентиля формируют положительные полупериоды проводимости и отрицательные полупериоды закрытого состояния, каждый мз которых состоит из трех тактовых интервалов шестидесятиградусных продолжительностей, на крайних на полупериодах тактовых интервалах формируют модулирующие сигналы управления, продолжительность которых опеределяет величину выходного напряжения преобразователя, отличающийся тем, что, с целью обеспечения плавного безударного изменения формы кривой выходного напряжения преобразователя в процессе N-кратного связанного регулирования частоты F и величины напряжения по закону постоянства отношения величины напряжения к частоте при номинальном (минимальном) питающем напряжении, формирование указанных модулирующих сигналов управления на всем диапазоне регулирования, начиная с начальной частоты FO, осуществляют в серединахтактовых под- интервалов с продолжительностью
Ео
г - -err--icr причем середины упомянуD fc го N
тых тактовых интервалов синхронизируют с серединой соответствующего центрального тактового подинтервала при нечетном N или с концом и началом соответствующих цент0
ральных тактовых подинтервалов при четном N, при этом в диапазонах частот F i F;j F ц-2 внутри тактовых интервалов формируют по i модулирующих сигналов управления
С ДЛИТелЬНОСТЬЮ Я TJ-J ( т; - г р м ) .
на частотных диапазонах F i F } F i на крайних участках тактовых интервалов формируют сигналы управления длительностью Ai- 1 (1-1)(1-2)Е0 + Ео
0
5
0
5
0
5
0
тому, находят как
и F
где Ео и
12 F12 F0E(1-1)N
а длительность остальных (i-2) сигналов управления определяют в соответствии с зави5 симостью Я п мУт-ТТЕ значения граничных частот F i и F i, переходных от одного поддиапазона регулирования к друF, ПТ ТТЕГ- ЕО
. FoE(l-1)N
(i-1)fRZ7Eo TE0
Е -минимальная (номинальная) и текущая амплитуды питающего преобразователь постоянного напряжения.
2. Способ по п. 1, отличающийся тем, что в диапазоне выходных частот пре,.Fo Е N FQ Е N
образователя -д-р-- -р-- длительность г тактовых подинтервалов принимают
1 равной соответственно r
3 Способ по п. 2, отличающийся тем, что, с целью улучшения спектрального состава выходного напряжения преобразователя, на всем диапазоне регулирования изменяют на величину у длительность расположенных в ближних к границам полупериодов половинах тактовых интервалов модулирующих сигналов управления, причем увеличивают длительность упомянутых сигналов управления на полупериодах проводимости и уменьшают указанную длительность на полупериодах закрытого состояния путем соответствующего сдвига дальних к упомянутым границам полупериодов фронтов соответствующих модулирующих сигналов управления, а величину у в каждой точке диапазона регулирования выбирают в соответствии с функциональной зависимостью у К(г-Я), где численное значение коэффициента К выбирают из семейства кривых, построенных на фиг 3 для четных N и на фиг. 4 для нечетных N,
Сущность изобретения связанное регулирование частоты и величины выходного .2 напряжения трехфазного мостового преобразователя по экономичному закону обеспечивающему постоянство отношения напряжения к частоте, осуществляется при этом плавным поэтапным изменением длительности основных и модулирующих сигна- лов управления, формируемых на граничных участках крайних внутри полупериодов управления тактовых интервалов 60- градусныхпродолжительностей Продолжительность тактовьгх подинтерва- лов, внутри и посередине которых синтезируются модулирующие сигналы управления при предложенном режиме управления находится в функциональной зависимости от величин питающего напряжения 2 з п ф- лы, 6 ил сл
а ttMt нб
- п гк n rt
- ( 5
П n n -г
и
ю
1 ГГ ГГГ - Г
Я- 1Ш П -.П...--П П ЧЪМП:
sir
L:t
ГЪ -ПЛПЪ
д ,-,..м-.
П Н
о 1с I; 1д , Ы тЬщ
;1;
%flfc
I
--O.Ui
IT
II
Г
II
6 /2QQi| fj fQ°t;3 j
ваг 2°
:Ш,
;1; ij Hj4iS®
0,1
02
02
И&г -- -jrjL
ГП Сп
i-н-+ 0 -0
0,8 1 U W
- c
- ttЈ,
7
ГЈ
1-1-Й1411-
OB 0,8 / /,2W
о Щ
&}-№ -..
| Забродин Ю С Автономные тиристор- ные инверторы с широтно-импульсным регулированием - М Энергия, 1977,| 2-1, Авторское свидетельство СССР № 1361692, кл Н 02 til 7/48 1987. |
